一種對GPS/INS組合導航的曳引式拉偏干擾
2012-03-24 13:03:58王義冬王大明
海軍航空大學學報 2012年4期
關鍵詞:信號
陳 軍,王義冬,劉 義,王大明
(1.北京航空航天大學,北京 100191;2.63880 部隊,河南 洛陽 471003;3.91872 部隊,北京 102442)
數據融合技術將全球衛星導航系統(Global Positioning System,GPS)和慣性導航系統(Inertial Navigation System,INS)緊密結合起來[1],GPS/INS組合導航已在航空和軍用飛機上被廣泛應用。在GPS/INS 組合導航中,通過GPS 信息與INS 信息的數據融合,大大提高了導航系統的抗干擾性,傳統的對抗措施已難以起效,尋找對GPS/INS 組合導航有效的干擾方法,已成為導航對抗領域的研究難點。
關于GPS/INS 組合導航的相關研究,主要集中在組合導航的算法及性能分析[2-8],而對對抗方法研究相關成果很少[9-10]。本文在總結GPS/INS 組合導航原理及抗干擾性能的基礎上,提出曳引式拉偏干擾,給出干擾的定義、數學表達形式、簡化形式,通過半實物仿真實驗證明其有效性并對其干擾效果進行分析。
1 GPS/INS 抗干擾性能分析
利用GPS/INS 組合導航中INS 提供的信息,可以增強GPS 信號的抗干擾能力,表現為以下幾個方面:可以利用INS 信息剔除由于對抗活動(誘騙干擾)造成的GPS 測量值異常;當機動、干擾或遮擋使GPS 信號丟失時,慣導可以輔助GPS 重新捕獲GPS信號;可使GPS 接收機跟蹤環路的帶寬取得很窄,解決了動態與干擾的矛盾。
如圖1 所示,在松耦合組合導航中利用GPS 量測信息對慣導誤差進行修正時,首先要判斷GPS 輸出數據是否為異常值。由于慣導的短時誤差的高精度,短時間內得到位置估值準確性高,可以作為GPS量測數據是否異常的判斷依據。對于獲得的GPS 數據,首先對其進行是否異常判斷,如果GPS 的量測數據為異常值將舍棄,不是異常值,則作為量測值輸入GPS/INS 融合算法。
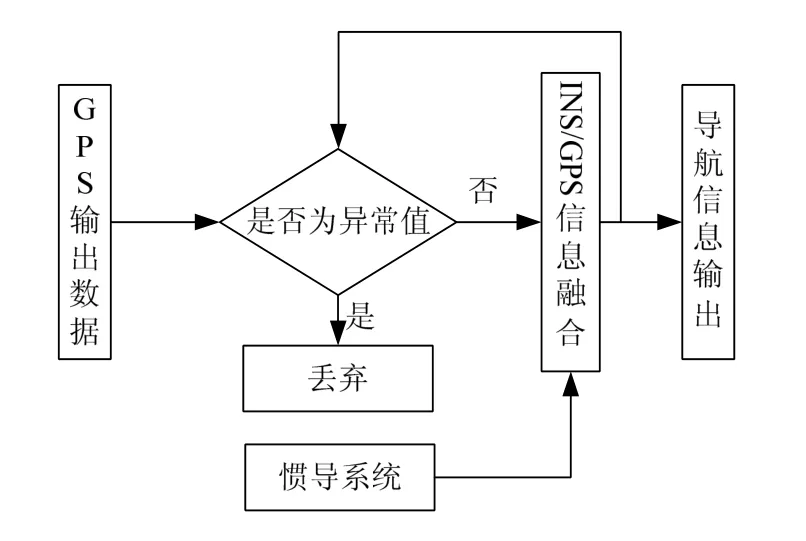
圖1 GPS/INS 數據處理流程圖
下面我們對GPS 數據異常與否的判斷方法進行討論。根據傳統概率數理統計計算方法,應用3δ法則進行誤差值剔。當GPS 定位值ZGPS滿足

時,認為其為異常值。
式(1)中,δins-gps由慣導誤差與GPS 測量誤差決定,在慣導誤差與GPS 量測誤差均為加性誤差,且GPS 量測誤差為零均值時有:

式(2)中:δgps為GPS 的量測誤差標準差;δins為慣導系統定位誤差標準差,其大小由慣導設備決定。目前的微慣導器件的精度為:0.1~1(°)/h精度的微陀螺、1~10 mg 精度的微加速度計。已知GPS/INSr融合周期為2 s,δins的大小約在4~40 m。
2 對GPS/INS 組合導航的曳引式拉偏干擾
2.1 曳引式拉偏干擾的定義及工作原理
定義:通過干擾設備產生欺騙干擾信號,使GPS/INS 組合中的GPS 接收機輸出與其實際位置逐漸偏離的導航定位數據,當偏離誤差ΔZGPS滿足時,稱這種干擾信號為“曳引式拉偏”干擾。式(3)中,δins-gps由慣導誤差與GPS 測量誤差決定。

GPS 導航定位的基礎就是測距,即通過測量時差獲得衛星和接收機之間的偽距。之所以稱為偽距,是由于衛星鐘和用戶鐘之間的鐘差存在,測得的距離并非真實距離,而是包含鐘差影響的距離。
偽距ρ′與衛星坐標(SVxi,SVyi,SVzi)、接收機坐標(Rx,Ry,Rz)之間有如下關系:

獲得偽距后,即可解算定位結果:
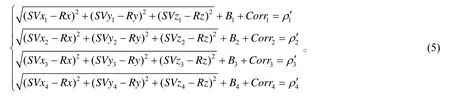
式(5)中:衛星坐標(SVxi,SVyi,SVzi)可由衛星導航電文數據計算求得;B為接收機鐘差等效距離偏差(=c?Δtr);Corri為第i顆衛星的已知修正量;ρi′為對第i顆衛星的觀測偽距;接收機坐標(Rx,Ry,Rz)和接收機鐘差rtΔ 為未知量,通過對式(4)解算求得。
為了產生“曳引式拉偏”干擾的效果,需要利用生成的干擾信號使通過相干接收及相應計算得到的偽距iρ′發生錯誤,根據錯誤的偽距iρ′進行定位計算,得到的定位結果與真實位置的誤差滿足式(3)。具體方法可以通過更改信號的時延(對應真星信號的時延)、頻率(這里指多普勒效應帶來的頻差)來達到。
2.2 曳引式拉偏干擾的信號形式
假設某顆真星到達接收機的信號為

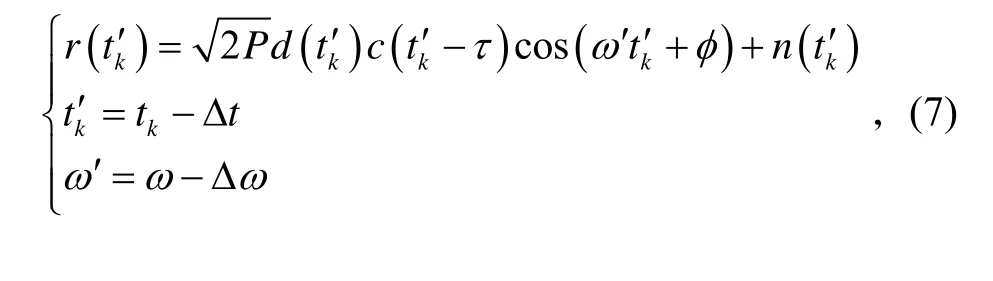
式中:P為信號功率;d(tk)為調制數據信息;c(tk?τ)為偽隨機碼序列;ω、φ分別為輸入信號的角頻率及相位;n(tk)為加性高斯白噪聲。
則要求“曳引式拉偏”干擾生成的信號到達接收機時應為
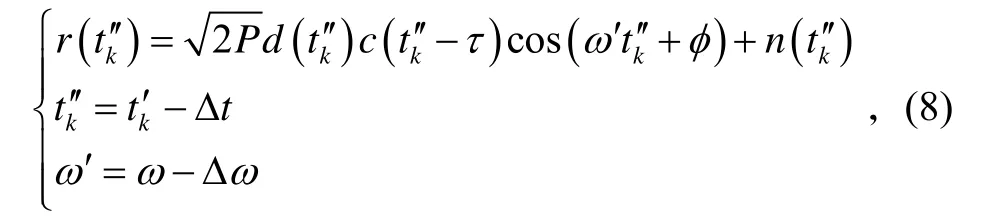
考慮到干擾設備與被干擾接收機之間的位置關系,干擾機發出的欺騙信號為
2.3 曳引式拉偏干擾的簡化形式
通過前面討論可知,要想獲得“曳引式拉偏”的效果,理論上需要對干擾信號的延時、頻率進行精確控制。為了達到這個目的,需要精確已知干擾目標的位置、當前時刻的星歷、GPS 信號的形式,然后通過式(3)~(9)計算出干擾信號的時延與多普勒頻率,生成欺騙干擾信號。由于接收機可以同時收到多顆星的信號,因而理論上需要產生多顆星的欺騙干擾信號。在實際應用,這樣的要求十分苛刻,工程化的可能性不高。
但是實際上,獲得“曳引式拉偏”的效果不需要如此苛刻的條件,由于GPS 接收機是根據多顆星的偽距來進行定位計算的,如果能夠對一顆關鍵星的信號進行欺騙式干擾,也能達到部分“曳引式拉偏”干擾的效果(在后面的半實物仿真試驗中將會證明)。
“曳引式拉偏”干擾的簡化方式,只需要估算出目標的飛行軌跡,設定欲干擾陣地,利用干擾設備產生單星的欺騙干擾信號,使與干擾軌跡與目標飛行軌跡相交。
3 仿真實驗
為驗證所提干擾的有效性,利用一臺GPS 信號模擬器(模擬器1)模擬藍方來襲巡航導彈,速度約為50 m/s(180 km/h),另一臺模擬器(模擬器2)模擬紅方防御的GPS 干擾信號,這個信號是橫向運動的,速度設置為20 m/s 和50 m/s。模擬實驗配置設備連接圖如圖2 所示。模擬器1 發出信號為?116 dBm,模擬器2 發出信號為?111 dBm,即干信比為5dB。
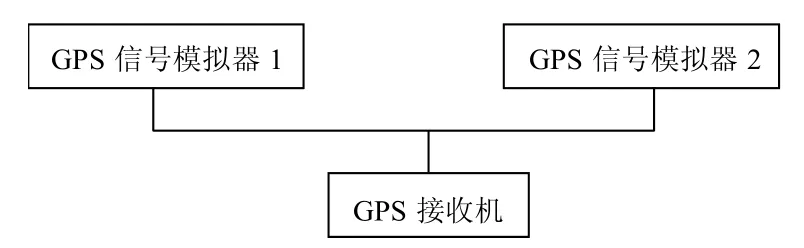
圖2 “曳引式拉偏”干擾模擬實驗配置
預設彈道為:起始位置為北緯0 度10 分,東經0 度0 分,以50 m/s 的速度向南飛行,飛行高度為200 m。模擬器時間設置為2012年12月2日12 點,可見衛星如圖3 所示,預設軌跡如圖4 所示。
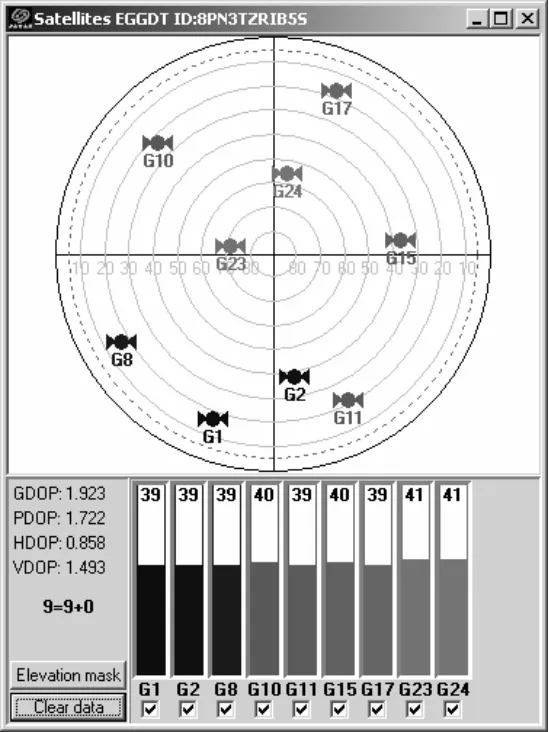
圖3 “曳引式拉偏”干擾模擬實驗設定星圖

圖4 “曳引式拉偏”干擾模擬實驗預設彈道軌跡
干擾為“20 m/s 的速度在長度為1 km 的跑道形航線上往返飛行”,只發射單星的欺騙干擾信號,軌跡圖如圖5 所示。干擾為“50 m/s 的速度在長度為5 km 的跑道形航線上往返飛行”,只發射單星的欺騙干擾信號,軌跡圖如圖6 所示。
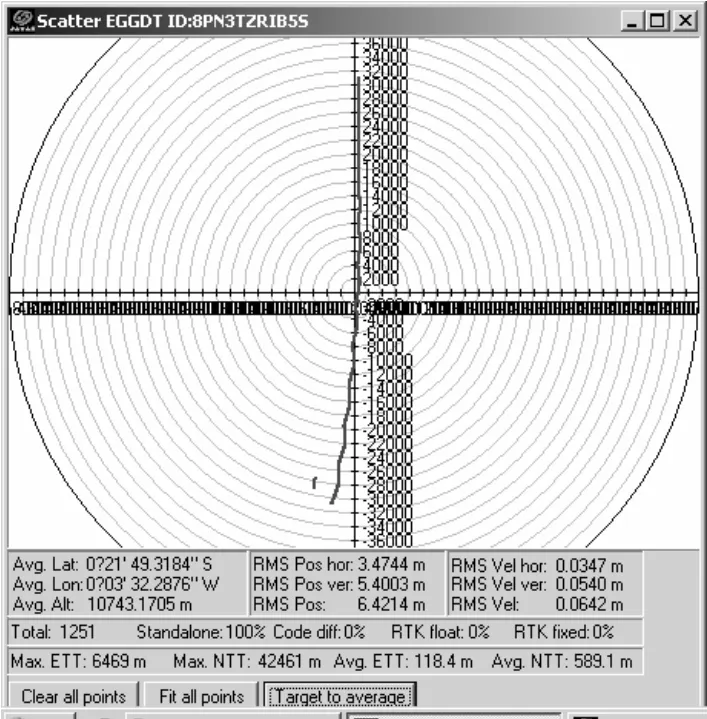
圖5 “曳引式拉偏”干擾模擬試驗結果1
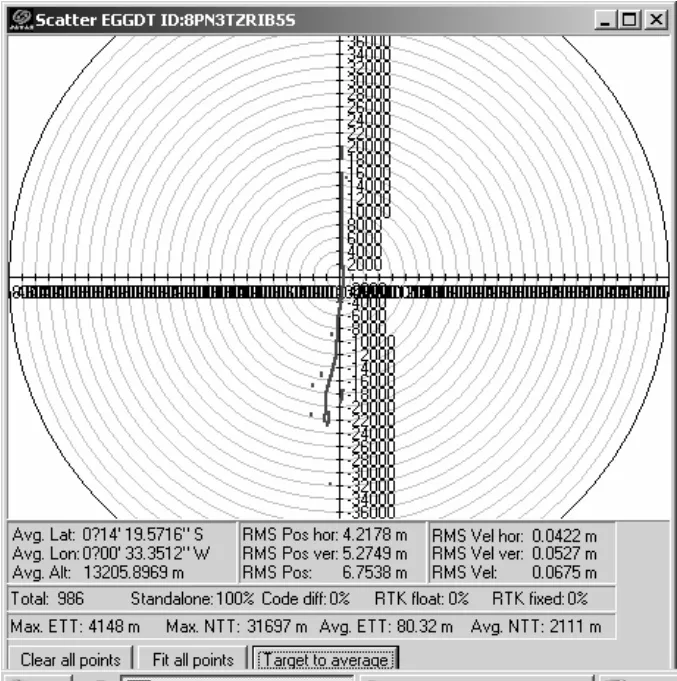
圖6 “曳引式拉偏”干擾模擬試驗結果2
對仿真結果進行分析可以發現,當目標位進入攻擊陣地時正常飛行,進入攻擊陣地后,發生“曳引式拉偏”現象。再具體比較圖5 與圖6,可以發現欺騙干擾的軌跡與其飛行軌跡之間的差別大小影響干擾效果,差別越小干擾效果越好。
4 曳引式拉偏對GPS/INS 組合導航的影響分析
為進一步對所提干擾方法效果進行分析,設計仿真試驗進行驗證。假設INS 的陀螺漂移的標準差與加速度計精度分為3 個檔次:0.1 (°)/h,1 mg;0.5 (°)/h,5 mg;1 (°)/h,10 mg。GPS 接收機的數據刷新率為10 Hz,位置、速度誤差分別為30 m、0.3 m/s,利用GPS 數據修正INS 的周期為2s。圖7為利用不同精度INS 與利用GPS/INS 進行導航的定位誤差時間的變化關系。可見只采用INS 進行導航時,導航誤差隨時間累積,誤差變化率與INS 精度密切相關,INS 精度越高、誤差變化率越小。而采用組合制導方式,導航誤差不隨時間累積,大大提高了定位導航精度。
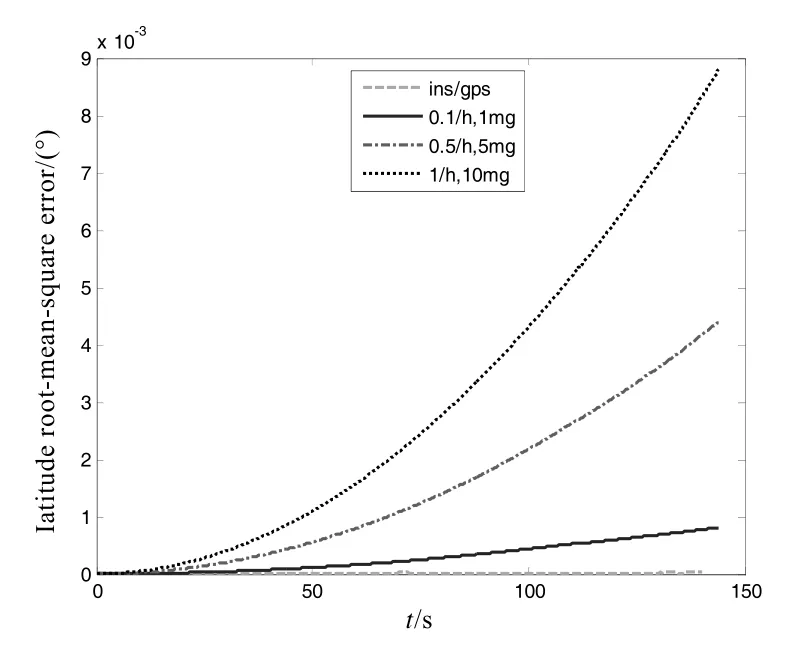
圖7 典型彈道下導航定位誤差比較
當GPS 受欺騙式干擾時,其輸出數據發生變化。如果變化速度緩慢,在組合制導工作流程中無法利用式(1)將其剔除。這時導航信息會依據錯誤GPS 定位信息對慣導系統提供修正,最終使組合導航系統輸出導航信息誤差發生偏差。
假設GPS 受到欺騙干擾,使其北向、東向速度虛假增加了1 m/s 的速度。由于GPS 數據修正INS的周期為2 s,在上面假設的慣導誤差下δins約在4~40 m,而由于欺騙干擾帶來的GPS 定位誤差約為3 m,無法利用式(1)將其剔除。圖8 為典型彈道下組合導航受干擾與未受干擾定位誤差比較。通過仿真分析可以看到,欺騙干擾可以影響組合制導的性能,能夠使制導航線偏離規劃彈道。
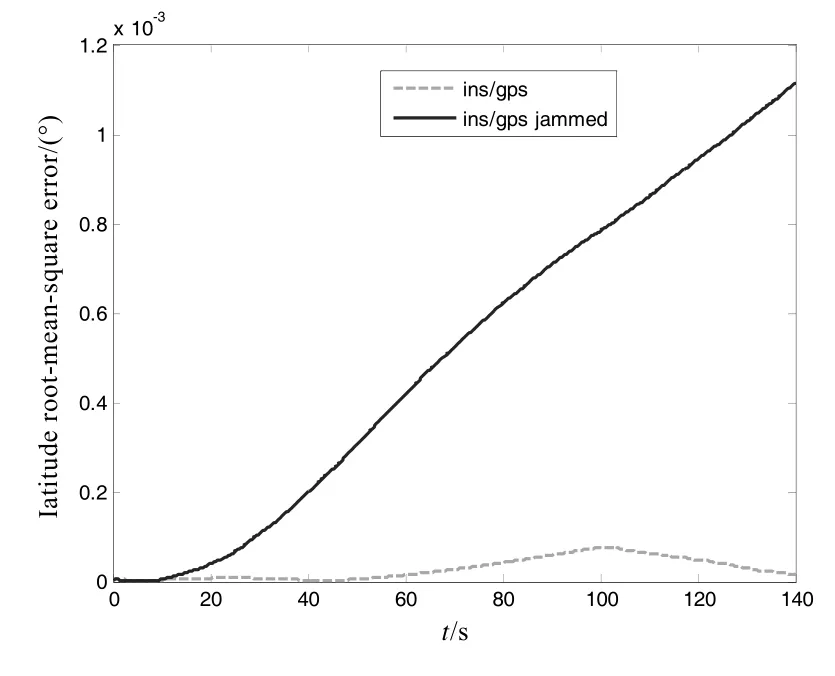
圖8 欺騙干擾對組合制導的影響
5 結束語
本文首先對GPS/INS 組合導航的原理及其抗干擾能力進行分析,通過理論分析、計算機仿真實驗、半實物仿真實驗等方法論證了對GPS/INS 組合制導干擾的可行性。特別提出曳引式拉偏干擾方法,給出其定義、信號形式,分析其工程實現可行性,并通過半實物仿真實驗證明其有效性并對其干擾效果進行分析。
[1] MOHINDER S GREWAL, LAWRENCE R WEILL, ANGUS P ANDREWS. Global positioning systems, inertial navigation, and integration[M]. 2nd ed. Hoboken∶ John Wiley & Sons. Inc., 2007∶234-254.
[2] 陳有榮, 袁建平. 一種改進的INS/GPS 組合導航魯棒H∞多重漸消容錯濾波算法[J].宇航學報, 2009,30(3)∶ 930-936.
[3] 王垚, 蔚保國, 羅顯志, 等. 一種更精確的多模GNSS 兼容性方法研究[J]. 系統工程與電子技術, 2010,32(6)∶1305-1308.
[4] 王新國, 李愛華, 許化龍. 數據融合技術在 SINS/ CNS/GPS 復合制導中的應用[J]. 系統仿真學報, 2009, 21(10)∶3062-3066.
[5] 劉義. 對抗條件下被動雷達制導技術及效能評估方法研究[D]. 長沙∶ 國防科技大學, 2010.
[6] CRASSIDIS J L. Sigma-point kalman filtering for integrated GPS and inertial navigation[J]. IEEE Trans. on AES, 2006,42(2)∶750-756.
[7] 林雪原, 鞠建波. 利用神經網絡預測的GPS/SINS 組合導航系統算法研究[J]. 武漢大學學報∶ 信息科學版, 2011,36(5)∶601-604.
[8] 竇長江. 衛星導航用戶機自適應濾波研究[J]. 無線電通信技術, 2006(6)∶48-50.
[9] 路遠, 陳鵬舉. 對GPS/INS 制導巡航導彈的干擾研究[J]. 航天電子對抗, 2003,19(1)∶6-9.
[10] 周坤芳, 李德武, 周湘蓉. 干擾環境下GPS/INS 組合模式研究[J]. 中國慣性技術學報, 2004,12(4)∶24- 27.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
