一種新的基于二值水平集和形態(tài)學(xué)的局部分割方法
2012-04-29 06:38:26董恩清
電子與信息學(xué)報 2012年2期
鄭 強 董恩清
(山東大學(xué)(威海)機電與信息工程學(xué)院 威海 264209)
1 引言
圖像分割是圖像處理領(lǐng)域中的熱點問題之一。主動輪廓模型(Active Contour Model, ACM)[1]以其強大的數(shù)學(xué)理論基礎(chǔ)和基于水平集(level set)的高效數(shù)值方案吸引了眾多學(xué)者。主動輪廓模型分為兩類:基于邊緣信息的模型[2,3]和基于區(qū)域信息的模型[4,5],這兩類模型的典型代表分別是測地主動輪廓(Geodesic Active Contours, GAC)模型[2]和 CV(Chan-Vese)模型[4]。
在實際應(yīng)用中,經(jīng)常只需分割感興趣的特定區(qū)域,即局部分割,如醫(yī)學(xué)實踐中常常需要對具有解剖意義的殼核、小腦等特定組織進行分割。基于邊緣信息的模型雖能實現(xiàn)局部分割,但對噪聲敏感,對邊緣較弱圖像的分割能力較差;基于區(qū)域信息的模型雖對噪聲、弱邊緣等問題具有較強的魯棒性,但其模型是一種全局分割模型,會將圖像中具有相近亮度的區(qū)域都分割出來,無法實現(xiàn)局部分割。
特別強調(diào)的是,本文中局部分割的概念與基于局部統(tǒng)計信息的分割模型是不同的。局部分割(local segmentation)指的是從復(fù)雜圖像中分割局部區(qū)域,而基于局部統(tǒng)計信息的分割模型(local region-based model)是一種全局分割(global segmentation)模型。兩者之間的相同點是,本文的局部分割模型和基于局部統(tǒng)計信息的分割模型都會用到局部統(tǒng)計信息。
局部分割是一個具有挑戰(zhàn)性的課題,局部分割精度(Local Segmentation Precision, LSP)不足和窄帶控制不穩(wěn)定是當(dāng)前局部分割方法中存在的兩個主要問題。近年來,局部分割逐漸引起眾多學(xué)者的重視[6-11],其中 Lankton等人[6]的研究最具代表性。他們提出一種局部分割框架 LRBAC (Localizing Region Based Active Contours),該框架允許任意基于區(qū)域信息的模型以局部的形式表達,將曲線進化過程控制在零水平集附近的窄帶范圍內(nèi)。實驗結(jié)果表明,該框架是一種非常有效的局部分割方法,對灰度不均勻圖像也能取得較好的分割結(jié)果。然而,該方法存在以下不足:(1)水平集函數(shù)需要不斷重新初始化為符號距離函數(shù)作為保證,并且為了保證算法的穩(wěn)定性,進化步長必須滿足 CFL(Courant-Friedrichs-Lewy)條件,這些將導(dǎo)致該方法的計算量較大;(2)水平集函數(shù)重新初始化過程中存在誤差導(dǎo)致窄帶控制方案不穩(wěn)定。
基于LRBAC方法,Mille[7]提出一種窄帶主動輪廓模型,該模型能夠更好地控制窄帶,并且構(gòu)建了基于曲率的模型;胡玉暉[8]提出一種基于局部子區(qū)域的活動輪廓模型,較好地解決了復(fù)雜多紋理圖像中的目標(biāo)分割問題。然而,兩者都沒有解決LRBAC方法[6]中符號距離函數(shù)所帶來的困擾。Zhang等人[9]提出一種可以選擇局部分割或是全局分割的圖像分割方法 SBGFRLS(Selective Binary and Gaussian Filtering Regularized Level Set)方法,該方法用可選擇的二值水平集函數(shù)實現(xiàn)局部分割,并且用高斯濾波實現(xiàn)曲線平滑。然而,該方法對灰度不均勻圖像分割能力不足,且局部分割精度受高斯濾波影響較大。
本文在LRBAC方法的基礎(chǔ)上,提出一種新的局部分割方法 BSMORLS(Binary and Selective Morphological Operation Regularized Level Set)。主要思路如下:(1)用二值水平集取代傳統(tǒng)的符號距離函數(shù)以降低計算量,并通過嚴格保持水平集函數(shù)的二值性以確保窄帶控制的穩(wěn)定性和局部分割的精度;(2)引入局部統(tǒng)計信息,增強對灰度不均勻圖像的分割能力;(3)用可選擇的形態(tài)學(xué)算子改進曲線平滑項,增加曲線平滑的靈活性;(4)本文方法用稀疏場算法實現(xiàn)以提高計算效率。在合成圖像和醫(yī)學(xué)圖像上的實驗結(jié)果表明,提出的方法能更好地實現(xiàn)圖像局部分割。
2 局部分割模型(LRBAC)
文獻[6]提出的局部分割框架LRBAC是圖像局部分割模型的典型代表。設(shè)圖像I的定義域為Ωx,變量x表示定義域Ωx上的任意一點,即x∈Ωx。C是用符號距離函數(shù)的零水平集表示的閉合曲線,即C= {x|φ(x)=0 }。用海維塞德函數(shù)(Heaviside Function)指定閉合曲線C的內(nèi)部部分:

同理,閉合曲線C的外部部分用(1 -H(φ(x)))表示,并用海維塞德函數(shù)的導(dǎo)數(shù)δ(φ(x))來指定圍繞在進化曲線附近的窄帶區(qū)域:
為了引入變量y,定義如下特征函數(shù)

當(dāng)y在以點x為圓心,r為半徑的圓的內(nèi)部時,其取值為1,否則為0。Ωy為變量y的定義域,即y∈Ωy。函數(shù)B(x,y)用來標(biāo)記局部鄰域,且被閉合曲線C分為局部內(nèi)部區(qū)域和局部外部區(qū)域。
如圖1所示,取δ(φ(x))控制的窄帶區(qū)域上任意一點為圓心,r為半徑做圓,則圓被閉合曲線C分為局部內(nèi)部區(qū)域(圖1閉合圓中的“1”標(biāo)記部分)和局部外部區(qū)域(圖1閉合圓的“2”標(biāo)記部分)。
因此,LRBAC方法的局部分割模型如下:

函數(shù)F(I(y),φ(y))為任意基于區(qū)域信息的能量模型,文獻[6]分析了 3種能量模型:UM(Uniform Modeling)能量模型,MS(Mean Separation)能量模型和HS(Histogram Separation)能量模型。本文以UM能量模型中的典型代表CV模型為例,式(4)的梯度下降流為
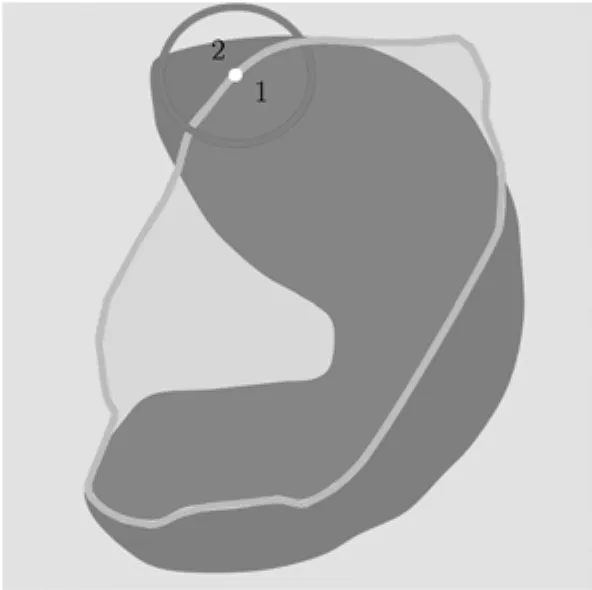
圖1 局部化模型示意圖

3 本文方法及相關(guān)問題分析
本文針對局部分割中存在的兩個問題,引入二值水平集函數(shù)取代傳統(tǒng)的符號距離函數(shù),并用二值水平集函數(shù)的取代式(5)中δ(φ(x))以精確控制圍繞在進化曲線附近的窄帶區(qū)域,并且在每次迭代時都嚴格保證水平集函數(shù)的二值性。與LRBAC[6]方法相同,本文引入局部統(tǒng)計信息,增加對灰度不均勻圖像的分割能力。同時,本文提出用可選擇的形態(tài)學(xué)算子(開運算、閉運算和中值集算子)作為新的曲線平滑方案,增加曲線平滑的靈活性。為了提高計算效率,本文方法采用稀疏場算法實現(xiàn)。特別說明的是,二值水平集的用中心差分實現(xiàn),后文中若無特別說明均以此為準(zhǔn)。
另外,Zhao等人[12]也曾將曲線進化公式中的δ(φ(x))用取代,取代的目的是為了擴大曲線進化范圍。因為當(dāng)進化曲線離圖像邊緣較遠時,δ(φ(x))函數(shù)會抑制離進化曲線較遠的圖像邊緣的檢測,而符號距離函數(shù)滿足,可以消除δ(φ(x))函數(shù)對非零水平集的抑制。這與本文方案是有本質(zhì)區(qū)別的。在本文方案中,二值水平集函數(shù)的并沒有改變δ(φ(x))函數(shù)窄帶控制的原始思想,采用二值水平集函數(shù)的取代δ(φ(x))函數(shù)是為了使得窄帶控制更加穩(wěn)定和精確,從而更加有利于實現(xiàn)圖像局部分割。
3.1 本文方法(BSMORLS)
綜上,本文提出的圖像局部分割方法如下:
(1)初始化水平集函數(shù)φ(x)
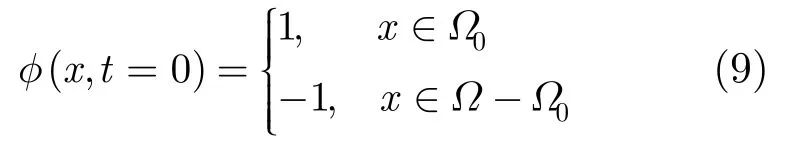
其中Ω0是圖像定義域Ω的一個子集。

其中ux和vx用式(7)和式(8)更新,用中心差分實現(xiàn)。值得注意的是,式(10)除了將式(5)中的δ(φ(x))函數(shù)用函數(shù)取代以更加準(zhǔn)確而穩(wěn)定的選取窄帶內(nèi)的點以外,還將式(5)中的δCV(φ(y))函數(shù)去掉。
Chan等人[13]指出,由于CV模型用非緊支撐且光滑的函數(shù)逼近海維塞德函數(shù)HCV(φ(y)),因此,CV模型的梯度下降流
與式(12)具有相同的穩(wěn)態(tài)解

因此,將式(5)中的δCV(φ(y))函數(shù)去掉是合理的。
(3)對步驟(2)中更新的窄帶內(nèi)的點取如下運算
(4)用可選擇的形態(tài)學(xué)運算平滑曲線,主要包括開運算、閉運算和中值集運算。
用可選擇的形態(tài)學(xué)運算平滑曲線不但更加有利于保持水平集函數(shù)的二值性,并且能夠增加曲線平滑的靈活性,使其更加有利于實現(xiàn)圖像局部分割。
(5)判斷進化曲線是否收斂,若沒有收斂,則轉(zhuǎn)到步驟(2),若收斂,則停止曲線進化。
為提高運算速度,本文方法采用稀疏場算法實現(xiàn)。稀疏場算法一般用數(shù)據(jù)鏈表的形式實現(xiàn),本文提出用二值水平集函數(shù)的作為新的數(shù)據(jù)鏈表。如圖 2,Lout和Lin是由控制的窄帶的非零數(shù)值區(qū)域,數(shù)據(jù)寬度是2ρ。以閉合曲線為分界線,Lout和Lin分別為數(shù)據(jù)鏈表的外部部分和內(nèi)部部分。一般假定Lout和Lin的寬度相同,且都為ρ。本文算法在實現(xiàn)過程中只提取控制的窄帶之內(nèi)的點(Lin和Lout)進行更新,此舉提高了計算效率。

圖2 數(shù)據(jù)鏈表及局部分割精度示意圖
3.2 相關(guān)問題分析
本文主要對局部分割精度、窄帶控制的穩(wěn)定性、曲線平滑方案等問題進行分析。
(1)局部分割精度及窄帶控制穩(wěn)定性分析
定義局部分割精度(Local Segmentation Precision, LSP)ρ是曲線法線方向上參與水平集函數(shù)進化,且對曲線進化有貢獻的數(shù)據(jù)寬度。如圖 2所示,參與水平集函數(shù)進化的數(shù)據(jù)寬度是2ρ,但是由于曲線上的點只能沿一個方向進化,即向內(nèi)或者向外,所以實際對曲線進化有貢獻的數(shù)據(jù)寬度是ρ。數(shù)據(jù)寬度越寬,LSP越低;數(shù)據(jù)寬度越窄,LSP越高。
LSP對局部分割有重要意義。如圖3所示為兩目標(biāo)由遠及近的情況下的局部分割結(jié)果,其中方形閉合曲線為初始輪廓。圖3(a)和圖3(b)都采用較低的LSP;圖3(c)和圖3(d)都采用較高的LSP。實驗結(jié)果表明,當(dāng)兩目標(biāo)距離較遠時,LSP對局部分割影響較小;當(dāng)兩目標(biāo)距離較近時,若LSP較低,則兩目標(biāo)之間會互相干擾,導(dǎo)致無法實現(xiàn)局部分割,只有當(dāng)LSP較高時,才能較好的實現(xiàn)局部分割。

圖3 局部分割精度分析
結(jié)合以上定義,分析LRBAC方法中的δ(φ(x))函數(shù),SBGFRLS方法中的函數(shù)與本文BSMORLS方法的函數(shù)發(fā)現(xiàn),三者控制的都是 LSP。δ(φ(x))函數(shù)建立在符號距離函數(shù)的基礎(chǔ)上,函數(shù)建立在二值水平集函數(shù)的基礎(chǔ)上。為方便圖示,假定控制 LSP的函數(shù)為L(φ(x)),則L(φ(x))可 能 為δ(φ(x)),或。分析圖4發(fā)現(xiàn),δ(φ(x))函數(shù)是一平滑鐘形函數(shù)(ε=1.5),而(高斯濾波器大小為3×3)和函數(shù)類似于理想的低通濾波器。顯然,只要能夠保持水平集函數(shù)的二值性,比δ(φ(x))能更精確更穩(wěn)定地控制窄帶區(qū)域,且比函數(shù)的 LSP更高。根據(jù) LSP的定義,若用中心差分實現(xiàn),則本文方案的LSP可以穩(wěn)定地控制在一個像素的精度。一個像素寬度是較為理想的LSP,如果LSP小于一個像素寬度則會影響進化速度,而如果LSP大于一個像素寬度,對于圖像中存在相距較近目標(biāo)的情況下,圖像局部分割結(jié)果則有可能出現(xiàn)目標(biāo)之間互相干擾的現(xiàn)象。
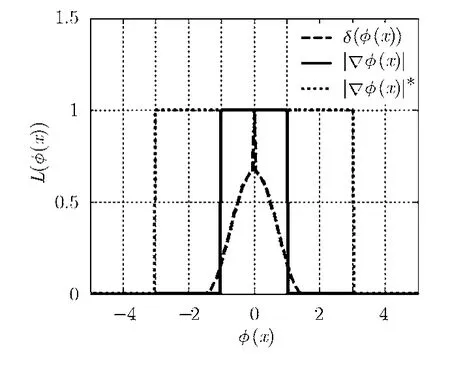
圖4 局部分割精度控制函數(shù)
在SBGFRLS方法中,在使用3×3大小的高斯濾波器的情況下,LSP不能達到一個像素的精度。下面特別說明,當(dāng)使用更小尺寸如2×2大小的高斯濾波器的情況下,LSP也不能穩(wěn)定地達到一個像素的精度,從而證明不論高斯濾波器的大小如何,SBGFRLS方法中LSP都不能穩(wěn)定地達到一個像素的精度。設(shè)定φ(x)為如下二值水平集,且考慮零水平集處于豎直狀態(tài)下的情況,G(x)是大小為2×2方差為1.0的高斯濾波器。
二者卷積后得
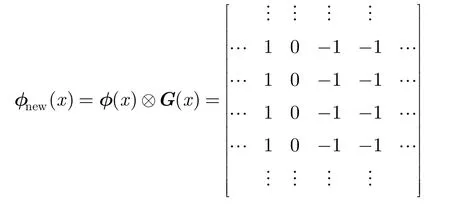
若用中心差分由φnew(x)求得則LSP必大于 1。因此,不論高斯濾波器的大小如何,SBGFRLS方法中LSP都不能穩(wěn)定地達到一個像素的精度。
(2)曲線平滑方案分析 本文提出用可選擇的形態(tài)學(xué)算子(開運算、閉運算和中值集運算)作為曲線平滑方案基于以下原因:
(a)形態(tài)學(xué)運算不但具有較好的平滑作用,而且更容易保持水平集函數(shù)的二值性。LRBAC[6]采用曲率作為平滑方案,SBGFRLS[9]采用高斯濾波作為平滑方案,都與形態(tài)學(xué)中值集運算的平滑效果基本相同,但是形態(tài)學(xué)算子在運算前后更加容易保持水平集函數(shù)的二值性。在本文方法中嚴格保持水平集函數(shù)的二值性是一個核心問題。
(b)用可選擇形態(tài)學(xué)算子作為曲線平滑方案是基于圖像特征的考慮。開運算只磨光凸向圖像外部的邊角,而能夠保留凸向圖像內(nèi)部的邊角。閉運算只磨光凸向圖像內(nèi)部的邊角,而能夠保留凸向圖像外部的邊角。對于沒有特別明顯或者特別尖銳邊角的圖像,則可以用中值集運算平滑曲線。這極大增加了曲線平滑方案的靈活性。
圖5所示是曲線平滑方案對比分析圖,其中方形閉合曲線為初始輪廓。圖5(a)和圖5(b)分別用形態(tài)學(xué)中值集算子和開運算作為平滑方案的分割結(jié)果;圖5(c)和圖5(d)分別用形態(tài)學(xué)中值集算子和閉運算作為平滑方案的分割結(jié)果。實驗結(jié)果表明,開運算能保留凸向圖像內(nèi)部的邊角,閉運算能保留凸向圖像外部的邊角,增加曲線平滑方案的靈活性將更加有利于實現(xiàn)圖像局部分割。
4 實驗結(jié)果及對比分析
由于 SBGFRL[9]方法基于全局統(tǒng)計信息,對灰度不均勻圖像的分割能力不足,為了增加可比性,本文將該方法的數(shù)據(jù)驅(qū)動力改為與本文相同,在相同數(shù)據(jù)驅(qū)動力的前提下更能證明本文方案在局部分割中的優(yōu)勢。此處特別標(biāo)記,原文獻[9]中的方法為SBGFRL(G),修改數(shù)據(jù)驅(qū)動力后的方法為SBGFRL(L), L和G分別指基于局部的統(tǒng)計信息和基于全局的統(tǒng)計信息。
為了分析和驗證本文提出的局部分割算法BSMORLS的實際效果,試驗中同時采用了LRBAC[6]方法、SBGFRLS(G)[9]方法和 SBGFRLS(L)方法一同對灰度不均勻圖像進行局部分割,其中方形閉合曲線為初始輪廓。
圖6和圖7是對灰度不均勻圖像的分割結(jié)果。圖6(a)為LRBAC 方法的分割結(jié)果,局部鄰域半徑為15;圖6(b)為SBGFRLS(G)方法的分割結(jié)果,高斯濾波器大小為5×5,方差為 1.0;圖 6(c)為SBGFRLS(L)方法的分割結(jié)果,局部鄰域半徑為15,高斯濾波器大小為5×5,方差為 1.0;圖 6(d)為本文BSMORLS方法的分割結(jié)果,局部鄰域半徑為15,曲線平滑方案選為形態(tài)學(xué)閉運算。實驗結(jié)果表明,LRBAC 方法受窄帶控制不穩(wěn)定影響,分割過程中出現(xiàn)窄帶范圍之內(nèi)搜索不到點參與曲線進化,從而迫使曲線進化停止的現(xiàn)象;SBGFRLS(G)和SBGFRLS(L)方法由于LSP不夠,相鄰目標(biāo)之間會出現(xiàn)互相干擾的現(xiàn)象,此外,對比圖6(b)和圖6(c)發(fā)現(xiàn),SBGFRLS(G)對灰度不均勻圖像的分割能力不足;本文提出的BSMORLS方法由于LSP高,對灰度不均勻圖像的分割能力較強,曲線平滑方案選取靈活,因此能夠達到較好的分割效果。
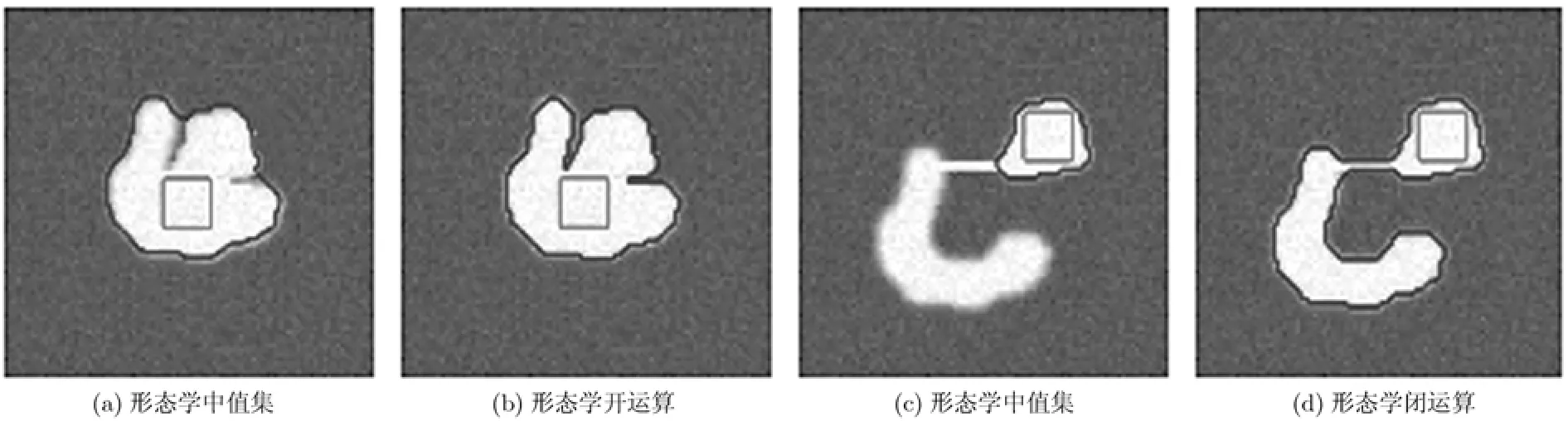
圖5 曲線平滑方案對比分析

圖6 灰度不均勻圖像分割結(jié)果
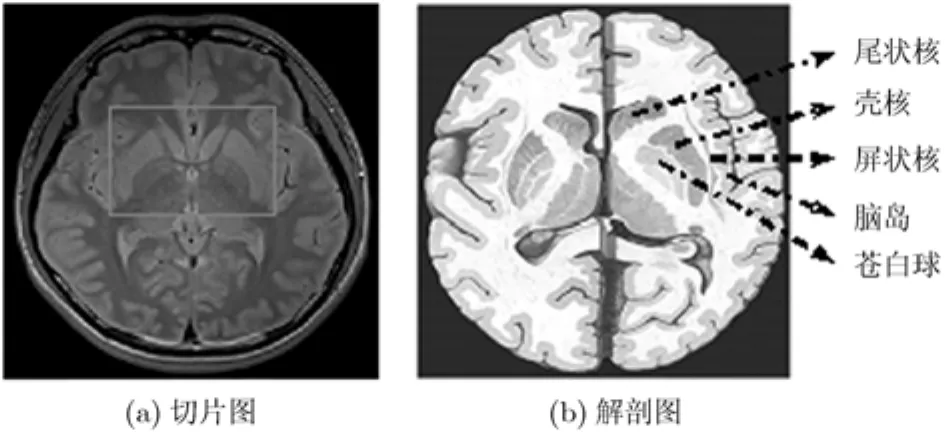
圖7 含有殼核區(qū)域的整個腦部切片圖及解剖結(jié)構(gòu)
圖7(a)為取自橫軸位質(zhì)子和 T2加權(quán)快速自旋雙回波序列(TSE-PD/T2)中的含有殼核區(qū)域的一張腦部切片圖,磁共振圖像來自于威海市市立醫(yī)院;圖7(b)為相應(yīng)的解剖結(jié)構(gòu)。在MR腦圖像中,殼核的分割受殼核外側(cè)的屏狀核及腦島影響較大,因為殼核外側(cè)與屏狀核之間僅有一層很薄的外囊相隔,距離非常近,在MR腦圖像中一般只有一到兩個像素的寬度,而腦島和屏狀核之間距離也非常近,所以在分割殼核區(qū)域時分割結(jié)果常會受到屏狀核甚至腦島區(qū)域的干擾,造成誤分割。另外,尾狀核對殼核的分割也有一定的干擾。圖8給出相應(yīng)實驗結(jié)果。
圖8為對幾種算法對殼核區(qū)域的分割結(jié)果對比圖。圖8(a)為LRBAC 方法的分割結(jié)果,局部鄰域半徑為11;圖8(b)為SBGFRLS(G)方法的分割結(jié)果,高斯濾波器大小3×3,方差 1.0;圖 8(c)為SBGFRLS(L)方法分割結(jié)果,鄰域半徑 11,高斯濾波器大小3×3,方差 1.0;圖 8(d)為本文BSMORLS方法的分割結(jié)果,鄰域半徑11,曲線平滑方案用形態(tài)學(xué)閉運算。實驗結(jié)果表明,LRBAC 方法受窄帶不穩(wěn)定影響,分割過程中出現(xiàn)窄帶范圍之內(nèi)搜索不到點參與曲線進化,從而迫使曲線進化停止的現(xiàn)象;SBGFRLS(G)和SBGFRLS(L)方法由于LSP不夠,尾狀核、屏狀核和腦島對殼核的分割都存在干擾現(xiàn)象;本文提出的 BSMORLS方法由于LSP高,對灰度不均勻圖像的分割能力較強,曲線平滑方案選取靈活,因此能夠達到較好的分割效果。
此外,在MR腦圖像中,殼核上半部分成像比較清晰,下半部分靠近蒼白球的一側(cè)成像也比較清晰,而下半部分靠近屏狀核的區(qū)域比較模糊,在分割過程中閉合曲線容易出現(xiàn)凸向外部的邊角,因此分割殼核區(qū)域時曲線平滑方案采用形態(tài)學(xué)閉運算將更加有利于局部分割。圖9給出相應(yīng)的對比分析。
圖9為不同曲線平滑方案對分割影響對比圖。圖 9(a)-9(d)都用本文方法進行分割,局部鄰域半徑為11,但每個圖所對應(yīng)的曲線平滑方案不同。圖9(a)為無任何曲線平滑方案時分割結(jié)果;圖 9(b)為用形態(tài)學(xué)中值集運算作為曲線平滑方案時分割結(jié)果;圖 9(c)為用形態(tài)學(xué)開運算作為曲線平滑方案時分割結(jié)果;圖9(d)為用形態(tài)學(xué)閉運算作為曲線平滑方案時分割結(jié)果。實驗結(jié)果表明,針對殼核區(qū)域的分割,選用形態(tài)學(xué)閉運算更加有利于分割。由此可見,靈活選取曲線平滑方案將更加有利于局部分割。
5 結(jié)束語
圖像分割是圖像處理中的研究熱點,當(dāng)前的分割方法大多熱衷于全局分割,而在實際應(yīng)用尤其是醫(yī)學(xué)圖像中卻更多地要求局部分割。局部分割是一個具有挑戰(zhàn)性的課題,窄帶控制不穩(wěn)定和局部分割精度不足是當(dāng)前局部分割方法中存在的兩個主要問題。本文提出一種新的局部分割方法,能夠較好地解決以上問題,并且進一步增加了曲線平滑的靈活性,稀疏場運算的引入使得本文方法實現(xiàn)更加簡單。應(yīng)用合成圖像和醫(yī)學(xué)圖像對幾種方法進行對比分析,本文方法能更好地實現(xiàn)圖像局部分割。
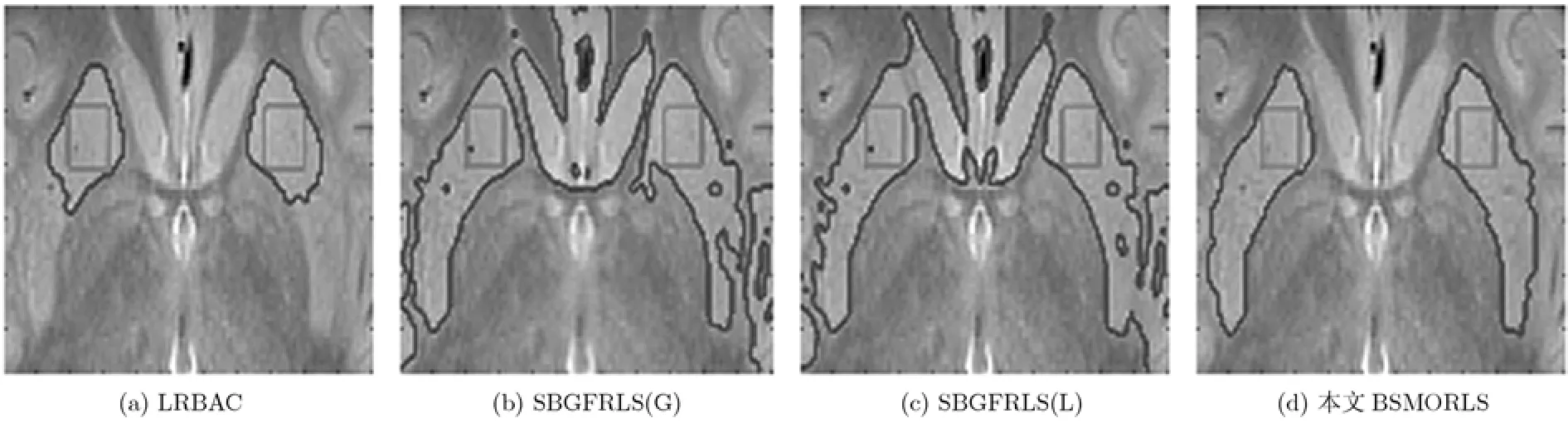
圖8 幾種算法對殼核區(qū)域分割對比圖

圖9 不同曲線平滑方案對分割影響對比圖
[1]Jayadevappa D, Kumar S S, and Murty D S. Medical image segmentation algorithms using deformable models: a review[J].IETE Technical Review, 2011, 28(3): 248-255.
[2]Caselles V, Kimmel R, and Sapiro G. Geodesic active contours[J].International Journal of Computer Vision, 1997,22(1): 61-79.
[3]Li C M, Xu C Y, Gui C F,et al.. Distance regularized level set evolution and its application on image segmentation[J].IEEE Transactions on Image Processing, 2010, 19(12):3243-3254.
[4]Chan T and Vese L. Active contour without edges[J].IEEE Transactions on Image Processing, 2001, 10(2): 266-277.
[5]Wang X F, Huang D S, and Xu H. An efficient local Chan-Vese model for image segmentation[J].Pattern Recognition, 2010, 43(3): 603-618.
[6]Lankton S and Tannenbaum A. Localizing region-based active contours[J].IEEE Transactions on Image Processing,2008, 17(11): 2029-2039.
[7]Mille J. Narrow band region-based active contours and surfaces for 2D and 3D segmentation[J].Computer Vision and Image Understanding, 2009, 113(9): 946-965.
[8]胡玉暉. 基于局部子區(qū)域的活動輪廓圖像分割方法[J]. 通信技術(shù), 2010, 43(2): 68-70.Hu Yu-hui. Sub-localizing region-based active contours[J].Communications Technology, 2010, 43(2): 68-70.
[9]Zhang K H, Zhang L, Song H H,et al.. Active contours with selective local or global segmentation: a new formulation and level set method[J].Image and Vision Computing, 2010,28(4): 668-676.
[10]Shi Y H, Dong E Q, Li Z Z,et al.. Research on the segmentation of tiny multi-target in brain tissues based on support vector machines[C]. IEEE International Conference on Complex Medical Engineering, Harbin, China, May 22-25,2011: 478-482.
[11]劉曉軍, 董恩清, 呂成林, 等. 磁共振腦部圖像殼核區(qū)域有監(jiān)督蟻群分割算法研究[J]. 中國生物醫(yī)學(xué)工程學(xué)報, 2010, 29(5):683-687.Liu Xiao-jun, Dong En-qing, Lv Cheng-lin,et al.. Supervised segmentation algorithm based on ant colony for putamen region in brain MRI[J].Chinese Journal of Biomedical Engineering, 2010, 29(5): 683-687.
[12]Zhao H K, Chan T, Merriman B,et al.. A variational level set approach to multiphase motion [J].Journal of Computational Physics, 1996, 127(1): 179-195.
[13]Chan T, Esedoglu S, and Nikolova M. Algorithms for finding global minimizers of image segmentation and denoising models [J].Journal on Applied Mathematics, 2006, 66(5):1632-1648.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56