基于CAN總線的可變頻率采動應(yīng)力實時監(jiān)測系統(tǒng)設(shè)計
2012-05-15 08:08:42孟曉靜趙媛媛
太原理工大學(xué)學(xué)報 2012年1期
孟曉靜,汪 毅,趙媛媛
(中國礦業(yè)大學(xué)a.信電學(xué)院;b.徐海學(xué)院,江蘇 徐州221008)
我國的煤炭資源條件較差,90%以上的產(chǎn)量來自于地下開采。目前我國的煤礦已進入深部開采期,深部開采容易誘發(fā)以沖擊礦壓、礦震和頂板大面積垮落為代表的煤礦災(zāi)害事故,其中沖擊礦壓作為采礦活動誘發(fā)的礦震,以其突然、急劇和猛烈的破壞特征嚴重威脅著礦山的安全生產(chǎn),并給我國煤礦造成了巨大的經(jīng)濟損失和人員傷亡[1-2]。這些地質(zhì)災(zāi)害的發(fā)生與采動應(yīng)力都有著很大的關(guān)系,采動應(yīng)力的監(jiān)測是研究以及預(yù)防的基礎(chǔ),而且是煤礦安全避險“六大系統(tǒng)”中監(jiān)控檢測系統(tǒng)的重要組成部分,對于采動應(yīng)力實時監(jiān)測系統(tǒng)的研究是很必要也具有很大的實用價值[3]。
對地應(yīng)力測試理論與技術(shù)的研究一直是巖石力學(xué)與工程學(xué)科的重要內(nèi)容。目前地應(yīng)力測量方法有很多種,而以測定巖體中的應(yīng)變、變形為依據(jù)的力學(xué)法的應(yīng)力解除法與水壓致裂法得到比較廣泛的應(yīng)用[4-7]。但對采動應(yīng)力的實時監(jiān)測系統(tǒng),比如尤洛卡的KJ216A、科大中天YAD200等多用油壓監(jiān)測傳感器和RS485總線傳輸。油枕傳感器結(jié)實耐用,但精度較小,反應(yīng)速度慢,不能實時的反映采動應(yīng)力的快速變化;而RS485總線不能滿足長距離傳輸?shù)囊螅铱煽啃耘c實時性也都沒有CAN總線高。本文所設(shè)計的采動應(yīng)力實時在線監(jiān)測系統(tǒng),采用中國礦業(yè)大學(xué)深部巖土力學(xué)與地下工程國家重點實驗室研制的,采用新型應(yīng)變材料的電阻-應(yīng)力傳感器,設(shè)計可變頻率監(jiān)測的程序,使采樣速率具有智能特性,在采動應(yīng)力變化較大時,能自動增加采樣速率,完整記錄煤巖在沖擊發(fā)生過程中的應(yīng)力變化,再利用實時性強、可靠性高且可長距離傳輸?shù)腃AN總線,將傳輸數(shù)據(jù)到井上主機,完成采動應(yīng)力的監(jiān)測要求[8]。
1 系統(tǒng)的總體構(gòu)成
采動應(yīng)力實時在線監(jiān)測系統(tǒng)如圖1所示,主要包括以下幾個部分。
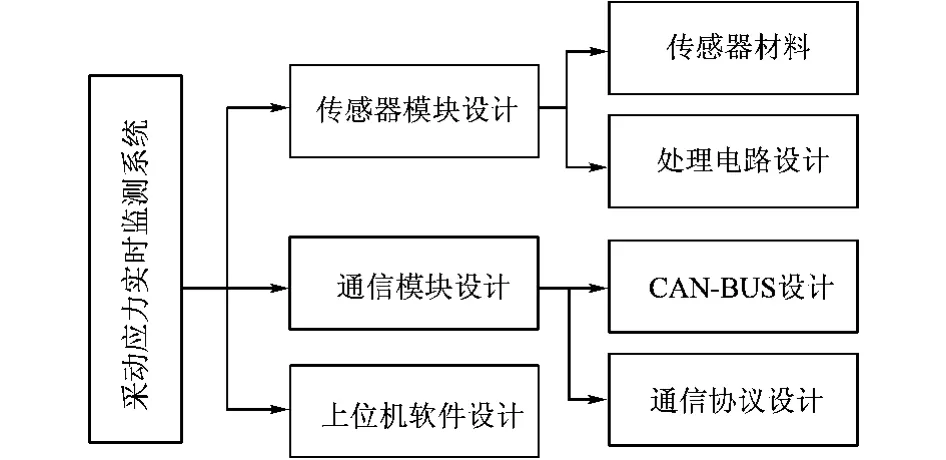
圖1 采動應(yīng)力總體設(shè)計框圖
1.1 傳感器模塊
傳感器模塊主要用來實時采集地應(yīng)力數(shù)據(jù),并完成數(shù)據(jù)格式的轉(zhuǎn)化及處理工作。其由傳感器和處理電路組成,其中還包括程序設(shè)計。此模塊設(shè)計的關(guān)鍵在于傳感器的電阻-應(yīng)力的標定、電阻的高精度采集電路設(shè)計以及變頻率采集的程序設(shè)計。
1.2 通信模塊
通信模塊包括CAN的底層硬件設(shè)計,CAN拓撲組網(wǎng)及協(xié)議編寫,以及CAN-NET轉(zhuǎn)換等。主要完成數(shù)據(jù)傳輸?shù)腃AN-BUS網(wǎng)絡(luò)設(shè)計,要保證傳輸數(shù)據(jù)的實時性、準確性以及抗干擾,還要滿足煤礦井下的特殊要求。
1.3 上位機軟件
上位機軟件可實時在線顯示各傳感器的監(jiān)測結(jié)果,提供用戶每個探頭的工作情況,存儲采集的數(shù)據(jù),并對數(shù)據(jù)進行分析,獲知地應(yīng)力情況異常工作面,并發(fā)布報警預(yù)告。本文對上位機不做深入研究。
2 信號處理模塊設(shè)計
2.1 傳感器的標定
傳感器是地應(yīng)力數(shù)據(jù)采集的基礎(chǔ),傳感器能否準確快速反映應(yīng)力的大小及變化,直接影響系統(tǒng)的準確性。本文采用了新型應(yīng)變材料電阻-應(yīng)力傳感器,為保證傳感器的精度和快速恢復(fù)性,首先做好標定工作,即標定傳感器的電阻-應(yīng)力關(guān)系曲線,如圖2所示0~50kΩ時電阻-應(yīng)力變化曲線。選擇線性度最好1~5kΩ的應(yīng)變范圍作為傳感器的電阻變化范圍,保證其測量精度。要求待測的采動應(yīng)力最大值為80MPa,標定電阻為1kΩ時應(yīng)力為井壁的初始應(yīng)力(需要實際測量,在這里我們將它標定為0 MPa),電阻為5kΩ對應(yīng)應(yīng)力為80MPa,即電阻每變化1Ω應(yīng)力變化5kPa。然后根據(jù)線性關(guān)系設(shè)計相應(yīng)的硬件電路和程序。
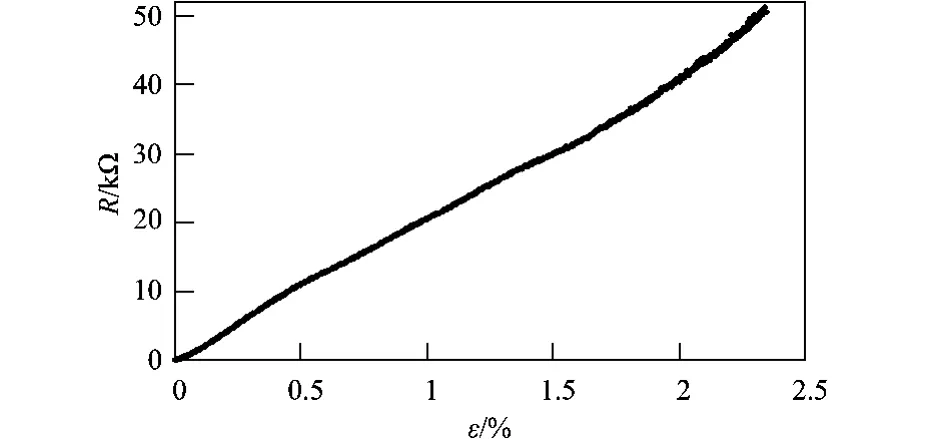
圖2 采動應(yīng)力總體設(shè)計框圖
2.2 處理電路的設(shè)計
采用電阻-應(yīng)力傳感器監(jiān)測工作面的應(yīng)力及變化,必須把傳感器裝設(shè)在采掘工作面的內(nèi)部,距離井壁8~15m的位置,傳感器和信號處理電路采用一體化設(shè)計,因此需設(shè)計精密的測電阻電路,同時要求具有較強的抗干擾能力。綜上考慮系統(tǒng)采用Mi-crochip公司的PIC18F2480單片機作為主控芯片,且18F2480自帶CAN控制器,減少了硬件的設(shè)置,節(jié)約了PCB板的面積。
電阻測量采用精密恒流源電路(精度可達1±0.002mA)。恒流源電路采用TL431作為電壓基準,OP07作為電壓跟隨器,使PNP的集電極電流保持恒定。傳感器接在P8處,A/D采樣P8兩端的電壓作為原始數(shù)據(jù),最后通過電壓-電阻-應(yīng)力的關(guān)系由單片機處理得采動應(yīng)力的實際數(shù)值。
2.3 可變頻率信號采集程序設(shè)計
要準確記錄應(yīng)力在煤巖采動過程中的變化規(guī)律及趨勢,采樣速率應(yīng)具有智能特性,即應(yīng)力變化較快,采用較高的采樣頻率,應(yīng)力變化慢時,采用較低的采樣頻率,程序流程如圖3所示。
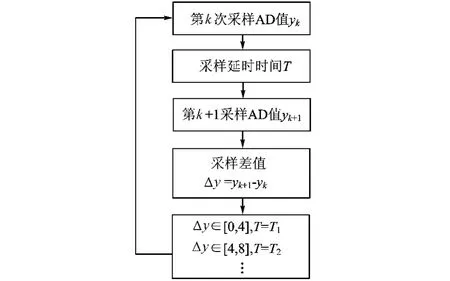
圖3 變頻率信號采集流程圖
3 通信模塊設(shè)計

圖4 通信模塊體系結(jié)構(gòu)圖
系統(tǒng)通信整體結(jié)構(gòu)如圖4所示,為方便網(wǎng)絡(luò)的擴充和智能探頭的增加。CAN組網(wǎng)采用總線型網(wǎng)絡(luò)拓撲結(jié)構(gòu)。每個采掘工作面的傳感器節(jié)點構(gòu)建成一個CAN網(wǎng)絡(luò),每個CAN網(wǎng)絡(luò)通過CAN-NET轉(zhuǎn)換器轉(zhuǎn)化為以太網(wǎng)的格式,通過井下已有的以太網(wǎng)傳輸?shù)降孛娴谋O(jiān)測主機,其設(shè)計的關(guān)鍵在于CAN通信模塊設(shè)計。
3.1 CAN底層硬件設(shè)計
CAN底層硬件設(shè)計主要由CAN控制器、CPU、驅(qū)動器以及相互之間的連接構(gòu)成。其實現(xiàn)方案一般有三種:1)CPU+CAN控制器+CAN收發(fā)器;2)集成CAN控制器的CPU+CAN收發(fā)器;3)CAN的串行I/O器件+CAN收發(fā)器。因智能探頭部分采用是自身帶CAN控制器的PICF2480作為CPU,為此采用第二種方案,以便減少所用的芯片,控制PCB的面積,提高系統(tǒng)穩(wěn)定性。選用PCA82C250作為CAN總線收發(fā)器,它是標準的CAN總線收發(fā)器,是協(xié)議控制器和物理傳輸線路之間的接口,可以用高達1Mb/s的速率在兩條有差動電壓的總線電纜上傳輸數(shù)據(jù)[9]。
CAN底層硬件電路中主要由3部分所構(gòu)成:采用PIC18F2480作為CPU、82C250作為CAN總線收發(fā)器和6N137的高速光電耦合器。其中CPU主要完成傳感器的信號采集和CAN的初始化,實現(xiàn)數(shù)據(jù)的收發(fā)。為增強系統(tǒng)的抗干擾能力,CPU的TX和RX通過6N137連接到82C250的TXD和RXD引腳,光耦合部分采用電源VCC和VCC0完全隔離[10]。
3.2 CAN協(xié)議的設(shè)計
CAN協(xié)議的目的是為了在任何兩個基于CAN-BUS的儀器之間建立兼容性;規(guī)范定義了傳輸層,并定義了CAN協(xié)議在周圍各層當(dāng)中所發(fā)揮的作用。CAN協(xié)議分為CAN 2.0A與CAN 2.0B。其中CAN 2.0A支持標準的11位標識符,而CAN 2.0B同時支持標準的11位標識符和擴展的29位標識符。采動應(yīng)力監(jiān)測系統(tǒng)對數(shù)據(jù)的實時性要求高,并且傳輸?shù)臄?shù)據(jù)僅僅是每個探頭的測到的壓力值,因此采用11位的標準幀格式CAN 2.0A即可。其幀格式依次包括:幀起始、仲裁場、控制場、數(shù)據(jù)場、CRC場、ACK場和幀結(jié)束。其中數(shù)據(jù)段長度可編程0~8個字節(jié),每個字節(jié)包含8位。位仲裁是CAN總線獨特競爭機制,可避免數(shù)據(jù)傳輸?shù)臎_突。
信號的采集不受上位機控制,智能探頭在上電后自動采集,不需要設(shè)置應(yīng)答模式,只需要在數(shù)據(jù)幀中標定好所采集數(shù)據(jù)的探頭號及工作面代碼,協(xié)議比較簡單。
4 結(jié)論
基于CAN總線設(shè)計的可變頻采樣的采動應(yīng)力實時監(jiān)測系統(tǒng)通過采用先進的應(yīng)力應(yīng)變材料,精確的標定及先進的電路設(shè)計等方法,解決了以往系統(tǒng)精度低、測量頻率固定、實時性差以及傳輸距離短的缺點。所設(shè)計的采集應(yīng)力智能傳感器已申請發(fā)明專利和實用新型專利,其中實用新型已獲得專利號(ZL201120117949.1)。利用本系統(tǒng)進行對采動影響下的煤巖體進行實時監(jiān)測,記錄并分析采動應(yīng)力,對沖擊地壓及其他應(yīng)力引起的煤礦災(zāi)害的防治及決策提供有力的支持。
[1] 潘立友.沖擊礦壓前兆信息的可識別性研究[D].山東科技大學(xué)博士論文,2003.5
[2] 竇林名,何學(xué)秋.沖擊礦壓防治理論與技術(shù)[M].北京:中國礦業(yè)大學(xué)出版社,2001.
[3] 付東波,齊慶新,秦海濤,等.采動應(yīng)力監(jiān)測系統(tǒng)的設(shè)計[J].煤礦開采,2009,14(6):13-16.
[4] 張光建.地應(yīng)力及其對巷道的影響分析[J].礦山壓力與頂板管理,2003,20(1):6-9.
[5] Matsuki K,Kaga N.Determination of three dimensional in situ stress from core discing based on analysis of principal tensile stress[J].International Journal of Rock Mechanics & Mining Sciences,2004,41:1167-1190.
[6] 蒲文龍,張宏偉,郭守泉.深部地應(yīng)力實測與巷道穩(wěn)定性研究[J].礦山壓力與頂板管理,2005,22(1):49-51.
[7] 周鋼,李玉壽,吳振業(yè).大屯礦區(qū)地應(yīng)力測量與特征分析[J].煤炭學(xué)報,2005,30(3)314-318.
[8] 張濤,薛鵬騫,蔣靜坪.基于CAN總線的煤礦安全監(jiān)測監(jiān)控系統(tǒng)的設(shè)計[J].煤炭科學(xué)技術(shù),2007,35(6):46-48.
[9] 穆麗娟,謝克明,郝世宇.基于CAN 總線電能表集中抄表系統(tǒng)的設(shè)計[J].太原理工大學(xué)學(xué)報,2008,39(3):292-294.
[10] 饒運濤,鄒繼軍,鄭勇蕓.現(xiàn)場總線CAN原理與應(yīng)用技術(shù)[M].北京:北京航空航天大學(xué)出版社,2003.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17