水聲定位實時抗距離模糊方法*
2012-06-07 01:50:44于平謝勝
艦船電子工程 2012年1期
于 平 謝 勝
(91388部隊水聲對抗技術(shù)國防科技重點實驗室 湛江 524022)
1 引言
水聲跟蹤定位系統(tǒng)的工作原理是在海底或海面布設(shè)水聲測量陣元,通過測量目標聲源主動或被動應(yīng)答發(fā)出的聲信號傳播到各個接收陣元的時延(對同步系統(tǒng))或時延差(對異步系統(tǒng)),采用球面交匯(對同步系統(tǒng))或雙曲面交匯(對異步系統(tǒng))來確定目標在發(fā)射信號時刻的水平位置[1~2]。
當目標與測量陣元相距較遠,而測量周期又較短時,就會出現(xiàn)傳播時延測量的不確定性。本周期收到的聲信號可能是前一個周期甚至幾個周期前發(fā)出的,可能相差若干個重復(fù)周期,從而導(dǎo)致跟蹤定位軌跡變形、搬移,稱為“距離模糊”。
由于存在距離模糊,可用于信號分組的信息量相對較少,給各陣元測量數(shù)據(jù)正確分組帶來了較大的困難。然而對于水聲跟蹤定位系統(tǒng),特別是導(dǎo)航系統(tǒng)來說,必須保證定位解算的實時性和定位軌跡的唯一性和正確性。因此,實時抗距離模糊是一個關(guān)鍵的技術(shù)難題,必須解決。
2 距離模糊形成機理
2.1 水聲跟蹤定位工作原理[2]
在海底或海面布設(shè)N個測量陣元,水下目標作定深航行,目標聲源周期性地發(fā)射聲信號,各接收陣元接收測量聲信號傳播時延,利用球面交匯或雙曲面交匯求解。
時延測量水聲定位的基本數(shù)學(xué)模型為

其中(xi,yi,zi)和ti分別是第i個陣元的空間位置和第i個陣元接收到信號時刻相對于接收機時鐘的時間(系統(tǒng)記錄時延)。(x,y,z)和ts分別為聲源(目標)空間坐標和信號發(fā)射時刻相對于接收機時鐘的時間。
對同步式定位系統(tǒng),聲源發(fā)射信號和接收機時鐘同步,即ts=0。式(1)可寫為

這是一個球面交匯模型,未知量為(x,y,z)。三個球面交于兩點,一般講,四個球面即可確定空間唯一點。
當目標深度z先驗已知時,式(2)蛻化為“圓交匯模型”。兩個圓相交于兩點(相切時為一點),若有第三個方程,即可確定平面上一個唯一的點。
對異步定位系統(tǒng),聲源時鐘與測量系統(tǒng)時鐘不同步,ts為未知量,異步定位模型即式(1)。
由于聲源到兩個陣元的距離差為定值,對應(yīng)的二次方程確定一個雙曲面,稱為“雙曲面交匯模型”。方程含有四個未知量(x,y,z)和ts,只要M≥4即可用該模型同時求出時鐘偏差ts和目標的三維空間位置。
2.2 距離模糊產(chǎn)生機理分析
在水聲跟蹤定位系統(tǒng)中,產(chǎn)生距離模糊的原因是既要滿足大范圍導(dǎo)航定位要求,又要提高系統(tǒng)導(dǎo)航定位幀率引起的,由于系統(tǒng)定位測量周期較短,使得聲源信號隔了一個或多個測量周期才到達遠處的測量陣元。
測量周期為T,則模糊臨界距離為Rc=CT。當目標與陣元i的距離超過模糊臨界距離Rc時,就會出現(xiàn)如圖1所示若干個模糊區(qū)域,區(qū)域1為無距離模糊區(qū)域(也可以說是0模糊周期區(qū)域),區(qū)域2、3分別為1、2個模糊周期的距離模糊區(qū)域。聲信號實際傳播時間tr將大于周期T,因為系統(tǒng)采用同步脈沖測時方法,系統(tǒng)將測量不出實際傳播時間tr,而只能測量出小于周期T的時間ti,實際傳播時間tr與測量時間ti相差為

即實際斜距Rr與測距值Ri相差ki個模糊臨界距離:

ki為模糊周期數(shù),若系統(tǒng)最大測量距離為Rmax,則最多模糊K個周期:
對于一組測量陣元來說,各個陣元的模糊區(qū)域互相重疊,混雜在一起,目標可能在各個陣元的不同模糊區(qū)域內(nèi),稱為模糊數(shù)據(jù)的非一致性。如圖2兩個陣元i、j的模糊區(qū)域相互重疊,目標A在陣元i、j的模糊區(qū)域1里;目標B在陣元i的模糊區(qū)域1及陣元j的模糊區(qū)域2里;而目標C在陣元i的模糊區(qū)域2及陣元j的模糊區(qū)域1里;同樣,目標D、E在陣元i、j的模糊區(qū)域2里;目標F、G分別在一個陣元的模糊區(qū)域1與另一個陣元的模糊區(qū)域2里;目標H在陣元i,j的模糊區(qū)域2里。圖2只標出了兩個應(yīng)答器尚且有如此多的重疊區(qū)域,如此復(fù)雜的混雜情況,而在水聲跟蹤定位試驗中一般投放四到二十幾個測量基陣,模糊區(qū)域重疊情況更加復(fù)雜。
若用此測量數(shù)據(jù)直接參與定位解算,必然會引起定位解算錯誤,導(dǎo)致跟蹤定位軌跡變形、搬移。

圖1 陣元i模糊區(qū)域示意圖
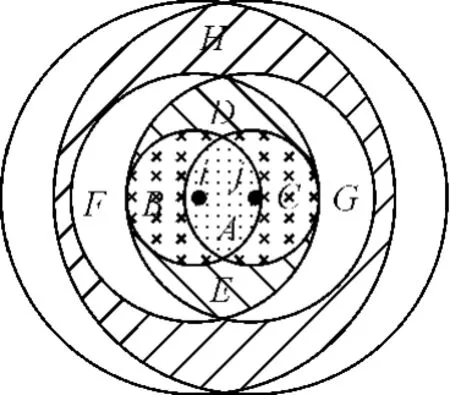
圖2 兩陣元模糊區(qū)域重疊示意圖
3 實時抗距離模糊的實現(xiàn)
硬件抗距離模糊的方法有很多種,其中常用的一種方法是減小應(yīng)答器陣位布放間距,即在相同的測量區(qū)域內(nèi)增加陣元的布放數(shù)量,同時降低測量陣元的接收靈敏度,強制減少聲信號的作用距離,從而降低距離模糊發(fā)生概率。硬件抗距離模糊技術(shù)實現(xiàn)較簡單,但為了達到試驗需要的測量范圍,需布防數(shù)量更多的應(yīng)答器,從而大大增加了系統(tǒng)在試驗測量中的工作成本,而且又人為地降低了系統(tǒng)的測量性能,故在試驗中一般不采用。
為了滿足大范圍導(dǎo)航定位的試驗需要,同時又要降低試驗成本、提高系統(tǒng)性能,一般采用數(shù)據(jù)處理方法來實現(xiàn)抗距離模糊。
軟件抗距離模糊就是根據(jù)距離模糊的發(fā)生機理和空間幾何關(guān)系,建立一組判據(jù)和數(shù)學(xué)模型,通過數(shù)據(jù)處理軟件來實現(xiàn)模糊數(shù)據(jù)的挑選和還原,從而解算出目標的真實軌跡。當系統(tǒng)無距離模糊的測量通道數(shù)據(jù)足夠多的情況下,可將存在距離模糊的數(shù)據(jù)剔除掉;當無距離模糊的測量通道數(shù)據(jù)不足以進行導(dǎo)航定位解算的情況下,可將存在距離模糊的通道的測時值增加模糊周期數(shù)ki個周期時間,以還原成真實的距離數(shù)據(jù)參與導(dǎo)航定位解算。
同組測距數(shù)據(jù)存在模糊數(shù)據(jù)的非一致性,下面介紹三角形判據(jù)法對測距數(shù)據(jù)進行預(yù)處理。
3.1 三角形判據(jù)法數(shù)據(jù)預(yù)處理
設(shè)有M(M≤N)個陣元測量時延數(shù)據(jù)穩(wěn)定有效,各個測量值逐個進行判斷:判斷陣元i對應(yīng)測距值Ri時,將其與其他任何一個陣元j對應(yīng)測距值Rj以及陣元i、j之間的距離dij進行組合,判斷是否構(gòu)成三角形(任意兩邊和大于第三邊,任意兩邊差小于第三邊),如圖3。
如果Ri、Rj、dij三邊不能構(gòu)成三角形,可以肯定測距值Ri、Rj中至少有一個是距離模糊的,在判斷測距值Ri時我們假定其它測距值是真值,所以判定Ri有距離模糊;同樣如果Ri、Rj、dij三邊構(gòu)成三角形,則Ri得一票Qi++。對比Ri得票數(shù)Qi和有效斜距個數(shù)M 可判斷陣元i對應(yīng)測距值Ri是否距離模糊。例如,如果M=4即有4組測距數(shù)據(jù)有效,則陣元i對應(yīng)測距值Ri與其它測距值有3種三角形組合,如果Ri得票數(shù)Qi<2,我們則認為Ri有距離模糊,同樣當M=3且Qi<1,3<M<5且Qi<2或者當M>5且Qi<3時,認為Ri有距離模糊,進行模糊處理再行軌跡解算。
3.2 最小差值法
在模糊數(shù)據(jù)比較少或真數(shù)據(jù)足夠解算的情況下,用三角形判據(jù)法預(yù)處理即可以判別有無模糊;當模糊數(shù)據(jù)多于非模糊數(shù)據(jù)或非模糊數(shù)據(jù)少于3組時,需用最小差值法繼續(xù)數(shù)據(jù)處理。
假設(shè)有M(M≤N)個陣元收到目標的同步測距信息Ri,由式(4)知各陣元對應(yīng)的實際距離為Ri+kiCT(ki=0,1,…,K),定位方程組(1)變?yōu)椋?/p>

目標位置(x,y,z)和各個測距值對應(yīng)的模糊周期數(shù)ki(i=1,2,…,M))為待求未知量,式中有 M+3個未知量,此時未知量個數(shù)大于方程個數(shù)M,定位方程組(5)無唯一解。
將各陣元的0~K個周期的可能的斜距值Ri+kiCT(ki=0,1,…,K)進行不同組合,共有(K+1)M種組合。對于任何一種組合,目標到陣元i斜距值Ri+kiCT與其它任何一個陣元j對應(yīng)斜距值Rj+kjCT,及陣元i、j之間的距離dij進行組合,用3.1節(jié)所述的三角形判據(jù)法判斷其距離模糊情況,若有距離模糊則將本組合剔除,不參加解算。解算過程如果算法發(fā)散也將本組合剔除。
判別、解算各個組合得到≦(K+1)M個同步解。如果目標有歷史信息則計算同步解與歷史信息距離差,差值最小的同步解為真解;如果沒有歷史信息或者歷史信息有飛點,則計算同步解與非同步解之間的距離差,差值最小的同步解為真解。
對于異步系統(tǒng)來說原理是相同的,這里不做贅述。
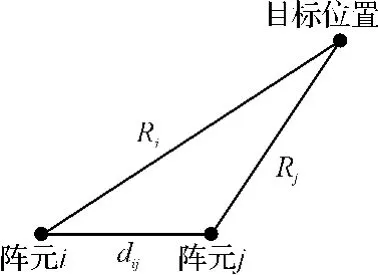
圖3 三角形判據(jù)示意圖
4 實時抗距離模糊方法應(yīng)用效果分析
為了驗證抗距離模糊的效果,我們在南海某海區(qū)進行了實時抗距離模糊試驗,布放5個海底測量陣元,各陣元間距500m,深度分別為250m、257m、263m、270m、278m,目標上安裝發(fā)射聲源,遠離陣元基陣方向航行,測量周期2s。
如圖4、5是實時定位軌跡。圖4為沒有進行抗距離模糊處理的試驗結(jié)果,目標從A點開始航行,開始沒有距離模糊,當目標航行至B點時,開始接收到距其比較遠的陣元5的一個周期距離模糊數(shù)據(jù),此時既有不模糊數(shù)據(jù)(譬如來自應(yīng)答器1的測距數(shù)據(jù))又有模糊數(shù)據(jù),定位方程組(1)無解。當目標航行至C點時,接收到來自所有陣元的一個周期模糊數(shù)據(jù),定位解算出假軌跡C′D′。目標航行至D點時又開始接收到距其比較遠的陣元5的兩個周期模糊數(shù)據(jù),又解算不出軌跡;如圖5是用本文論述的數(shù)據(jù)處理方法抗距離模糊處理后的定位試驗結(jié)果。
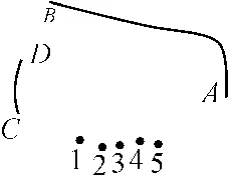
圖4 沒有抗距離迷糊處理的定位軌跡
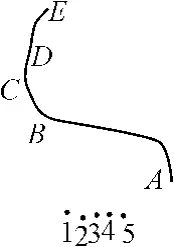
圖5 抗距離迷糊處理的定位軌跡
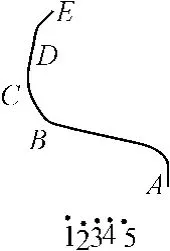
圖6 DGPS軌跡
抗距離模糊定位結(jié)果數(shù)據(jù)與試驗現(xiàn)場實時記錄的DGPS軌跡數(shù)據(jù)進行對比分析,如圖6為DGPS軌跡,DGPS定位精度小于1m。對比結(jié)果表明,抗距離模糊導(dǎo)航定位結(jié)果在誤差允許的范圍內(nèi)與DGPS定位軌跡基本重合。
5 結(jié)語
試驗結(jié)果證明,本文論述的抗距離模糊方法完全可以解決距離模糊問題。在抗距離迷糊定位試驗過程中,用最小差值法消除和修正距離模糊數(shù)據(jù)可以收到很好的效果。在陣元布放間距較小,系統(tǒng)接收到有效測距數(shù)據(jù)量較多的情況下,本方法運算量較大,需占用較長的機器時間,此時應(yīng)結(jié)合測距突變點的判斷來實現(xiàn)抗距離模糊。
[1]江鐵彪,陳清波.一種解決定位模糊區(qū)域的數(shù)據(jù)處理方法[J].海上試驗靶場,1996(2):34-36.
[2]田坦,劉國枝,孫大軍.聲吶技術(shù)[M].哈爾濱:哈爾濱工程大學(xué)出版社,2000:247-263.
[3]R.J.尤立克.水聲原理[M].洪申,譯.哈爾濱:哈爾濱船舶工程學(xué)院出版社,1990:79-183.
[4]馬大猷.現(xiàn)代聲學(xué)理論基礎(chǔ)[M].北京:科學(xué)出版社,2004.
[5]劉伯勝,雷家煜.水聲學(xué)原理[M].哈爾濱:哈爾濱工程大學(xué)出版社,1993:59-119.
[6]孫仲康,陳輝煌.定位導(dǎo)航與制導(dǎo)[M].北京:國防工業(yè)出版社.
[7]徐莘薇.計算方法引論[M].北京:高等教育出版社.
[8]趙羽.界面反射對水下目標定位的影響分析[D].碩士論文,2001.
[9]王玉泉.水聲設(shè)備[M].北京:國防工業(yè)出版社,1985.
[10]鞠得航,等.信號檢測理論導(dǎo)論[M].北京:科學(xué)出版社,1977.
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52