艦載光電對抗系統作戰仿真方法研究*
2012-06-07 01:51:38史匡
艦船電子工程 2012年10期
史 匡
(華中光電技術研究所武漢光電國家實驗室 武漢 430074)
1 引言
裝備作戰仿真是將武器系統的仿真模型在虛擬戰場環境中,在一定的作戰背景下,進行武器系統、人員、戰場環境的作戰過程仿真。艦載光電對抗系統是一套具備激光壓制、激光壓制干擾、激光引偏干擾和無源光電干擾等多種干擾手段的對抗系統。在缺乏實彈試驗的條件下,開展作戰仿真就成為艦載光電對抗系統干擾效能的一條重要研究路徑[1]。文獻[1]中介紹了裝甲車輛作戰仿真平臺設計方案,在該平臺上可以進行裝甲車輛作戰仿真、作戰效能評估,該平臺為裝甲車輛改型以及研制方案論證提供決策依據,也可以用于研究作戰理論[2];文獻[2]中針對防空作戰仿真系統的特點,建立了基于HLA技術的公共仿真開發平臺[3],文獻[3]在分析光電對抗裝備仿真技術現狀和發展趨勢的基礎上,探討了光電對抗仿真評估系統的總體結構和組成,對其中涉及的關鍵技術進行了初步研究。但開發過程中需HLA軟件平臺支持,起點較高,不易普及。
2 作戰仿真模型
在進行艦載光電對抗系統仿真作戰過程中,需對作戰雙方及作戰過程進行建模,所需的模型為虛擬戰場環境模型、艦船模型、干擾分系統模型、光電制導武器模型、干擾作戰決策模型等。在此基礎上可開展光電對抗作戰的戰術決策的效能研究、戰術研究、最佳配置方案等。
為提高仿真過程的可信度,仿真模型的計算過程中增加了隨機數,隨機數采用的偽隨機數生成算法為線性同余算法。其算法為

隨機數的種子是采用直接讀取CPU時鐘和計數器計數值實現的,其取值范圍為[0,1]。
2.1 虛擬戰場環境
在試驗中模擬的作戰環境為純海洋背景,設定了以下變量:洋流方向、洋流速度、風速、風向和能見度。其中洋流方向和洋流速度影響艦船的坐標計算,而風速和風向影響到來襲導彈的坐標計算,考慮到風對艦船的作用遠小于洋流對艦船的作用,因此在本試驗中,忽略不計。
考慮到光電對抗其作戰范圍小于視距距離,因此虛擬的戰場是一個無限大的平面,但其作戰范圍是以艦船為中心的視距范圍(≤25km)。虛擬戰場統一使用直角坐標系,洋流和風對物體的作用解析為兩個坐標軸上作用力的合成。坐標系原點設置為艦船的初始位置,航向角以正北方向為0°,順時針方向為正。
在實際環境中海面存在一定幅度的波浪,這會影響到艦船的姿態計算,因此忽略不計。
2.2 導彈運動模型
文獻[4]為研究反艦導彈飛行仿真方法,依據導彈系統組成、各個部分相互作用關系和使用環境條件、使用方式,研究建立數學模型、仿真程序設計、計算方法,所采用的模型較為復雜,不適合本課題的需求。因此本課題的導彈模型僅采用了運動學模型:
2.3 艦船運動模型
虛擬戰場中的艦船是被假定為勻速運動的,不考慮因為艦船動力變化引起的速度和航向的變化,亦不考慮因為海浪引起的艦船姿態的變化。
假設艦船當前所在位置為(x0,y0),速度為vm/s,航向為θ弧度,經過t時刻后新位置(x1,y1)的計算公式為

2.4 激光壓制干擾設備模型
在本試驗中激光壓制干擾設備的數學模型僅考慮其隨艦船運動、在方位俯仰方向的旋轉和壓制激光的工作三個因素,其余細節均忽略不計。
2.5 激光引偏干擾設備模型
在本試驗中激光壓制干擾設備的數學模型僅考慮其隨艦船運動、在方位俯仰方向的旋轉和引偏激光的工作三個因素,其余細節均忽略不計。
2.6 無源干擾設備模型
在本試驗中無源干擾設備的數學模型僅考慮其隨艦船運動、在方位俯仰方向的旋轉和煙幕干擾彈布設三個因素,其余細節均忽略不計。在目前缺乏無法干擾設備布設模型的情況下,假設布設煙幕的目的是在導彈和艦船之間形成一道煙幕墻,使得導彈無法探測到艦船目標。
2.7 激光在大氣中的能量衰減模型
激光在大氣中的能量衰減主要來源于兩個方面:激光束散角和大氣粒子對激光能量的散射,經典的激光在大氣中的能量衰減公式為

其中:σ為大氣衰減系數,取2.7;V 為大氣能見度,取20km;R為目標距離,單位km;θt為激光束散角,取1mrad;Ar為探測器的孔徑(面積),單位為m2;根據計算,相對大氣能見度而言,激光的束散角對激光能量的衰減作用更為明顯。
2.8 作戰決策模塊算法
作戰決策模塊是基于艦載光電對抗演示系統開發的,采用了相同的決策算法。算法根據目標的威脅等級大小和與艦船距離遠近依次采用不同干擾手段發送光電作戰指令,每隔1s決策一次。
3 作戰仿真試驗
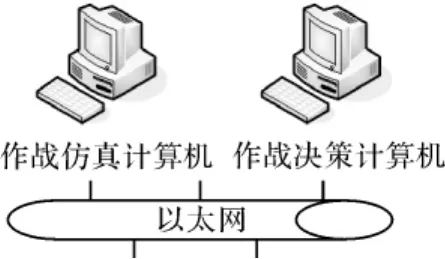
圖1 仿真試驗硬件結構
艦載光電對抗系統作戰試驗是建立在半實物仿真試驗數據基礎上的數學仿真試驗,在作戰仿真計算機中虛擬出一個作戰環境,并在此環境中構建來襲導彈、艦船和艦載光電對抗系統。通過步進仿真的方式來對艦載光電對抗系統的作戰過程進行仿真,而艦載光電對抗系統的作戰方案制定是由作戰決策計算機生成的,兩條計算機通過以太網方式連接,如圖1所示。
仿真試驗的過程為:接到啟動命令后,每隔一個仿真周期(默認為40ms)作戰仿真計算機計算虛擬戰場中各物體的狀態、姿態和位置等信息,經過數據處理后,將來襲導彈信息和各干擾設備的狀態信息通過以太網傳遞給作戰決策計算機,作戰計算機接收到數據后按照作戰規則自動生成作戰方案,然后將作戰流程發回作戰仿真計算機,作戰仿真計算機將命令送到相應的虛擬干擾設備中,等待下一個仿真周期開始,依次循環,直到符合仿真結束條件出現才停止仿真試驗。
仿真試驗結束的條件為:1)所有來襲導彈均已干擾成功;2)艦船被擊中;3)總的仿真耗時到達了限定時間。
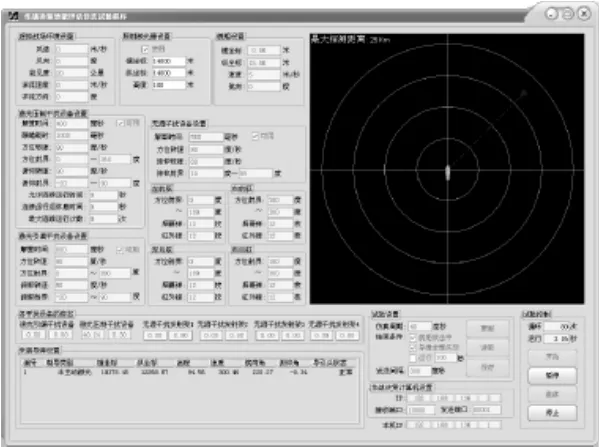
圖2 作戰仿真計算機主界面
試驗將首先對光電制導導彈模型進行無干擾條件下的仿真飛行試驗,評估其性能;再對導彈模型施加單一干擾樣式,評估光電對抗的干擾效能;最后由艦載光電對抗系統演示系統的作戰決策模塊指揮進行光電對抗綜合作戰仿真試驗。
4 試驗結果
激光半主動制導導彈在工作過程中需要目指激光進行引導,假設艦船初始位置在(0,0)處,目指激光在(14000,14000,100)(單位:m)處,則激光目指與艦船距離約20000m;導彈的初始位置、艦船速度10m/s,航向正北;、風向、風速、洋流速度、洋流方向均為0,能見度為20000m;仿真周期為40ms;仿真試驗不考慮各種設備故障對試驗的影響。假設導彈進入與艦船距離小于15000m時,采用激光壓制干擾設備;小于7000m時,使用無源干擾樣式;有激光目指時,采用激光引偏設備,布設點與艦船距離150m。
4.1 無干擾時光電制導導彈的仿真飛行試驗
每次仿真試驗的導彈出現位置固定,但艦船位置不固定,為上一次仿真試驗結束后的位置。表1記錄了激光半主動制導/導彈的彈著點與瞄準點的距離。
表1 激光半主動制導導彈仿真試驗結果
從上述試驗結果可以發現,無干擾條件時導彈均可以擊中艦船,且與艦船的尺寸相比,彈著點的誤差可以忽略不計。
4.2 光電對抗綜合作戰仿真試驗
圖3 仿真光電制導導彈飛行軌跡曲線水平面投影
試驗過程與前一個試驗相同,不同點為三種干擾手段會綜合使用,電視制導、紅外制導和激光半主動制導導彈各一枚從不同方向來襲,距艦船20km左右。仿真試驗的結果如圖3所示。
作戰模擬仿真程序可模擬真實的光電對抗作戰過程,從圖3中可以發現這三枚光電制導導彈是依次被干擾成功的;作戰決策模塊提交的對抗多目標的作戰方案可行。
5 結語
在仿真試驗中,作戰決策模塊無航跡預測功能,因此判斷導彈被干擾成功的依據是導彈消失,收不到更新的數據。而光電制導導彈被干擾成功到導彈消失存在一段時間,因此建議艦載光電對抗系統的戰術應用軟件的設計過程中具備航跡預測功能。無源干擾手段的干擾效能與其煙幕存在周期有關,因此在實際的艦載光電系統設計中,要充分考慮干擾彈發射時刻和戰場環境中的風對煙幕存在周期的影響,戰術應用軟件可進行煙幕布放及存續時間的預測功能。
[1]狄東寧,王正元,岑凱輝,等.裝甲車輛作戰仿真平臺設計[J].計算機仿真,2003(3):22-24.
[2]馬賢穎,李學軍.基于HLA的防空作戰仿真系統研究[J].現代電子技術,2005(19):4-6.
[3]余寧,李俊山,王新增,等.光電對抗仿真評估系統研究[J].四川兵工學報,2011(5):5-7.
[4]符燕,付新勝.反艦導彈飛行仿真方法[J].指揮控制與仿真,2010(10):87-89.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19