基于支持向量機(jī)的MEMS陀螺儀隨機(jī)漂移補(bǔ)償*
2012-06-10 08:08:56李澤民段鳳陽馬佳智
傳感技術(shù)學(xué)報(bào) 2012年8期
關(guān)鍵詞:模型
李澤民,段鳳陽,馬佳智
(空軍航空大學(xué)航空控制工程系,長春130022)
隨著微電子技術(shù)和集成電路技術(shù)的發(fā)展,采用微機(jī)電系統(tǒng)(MEMS)技術(shù)的慣性傳感器以其體積小、質(zhì)量輕、成本低、產(chǎn)品可靠性高等優(yōu)異特性,被廣泛應(yīng)用于汽車、航空、航天和武器制導(dǎo)等軍民領(lǐng)域[1]。由于受自身結(jié)構(gòu)缺陷和加工工藝的限制,MEMS陀螺儀存在較大的漂移,尤其是其中的隨機(jī)漂移,具有隨機(jī)性、非線性、非平穩(wěn)和弱時(shí)變特性,已成為制約MEMS陀螺儀向高精度領(lǐng)域應(yīng)用的主要因素,必須建立有效的誤差模型對(duì)其進(jìn)行預(yù)測(cè)和補(bǔ)償[2]。
目前常用的陀螺儀隨機(jī)漂移預(yù)測(cè)方法主要有兩類:一類是以傳統(tǒng)時(shí)間序列分析法為代表的統(tǒng)計(jì)建模方法,如將AR模型或者ARMA模型與Kalman濾波器相結(jié)合[3-4]。這類方法要求時(shí)間序列具有平穩(wěn)性、正態(tài)性和獨(dú)立性特征,極大的限制了模型的使用范圍和預(yù)測(cè)精度。另一類是以神經(jīng)網(wǎng)絡(luò)為代表的人工智能算法[5]。神經(jīng)網(wǎng)絡(luò)具有很好的非線性逼近能力,但神經(jīng)網(wǎng)絡(luò)訓(xùn)練過程遵循的是經(jīng)驗(yàn)風(fēng)險(xiǎn)最小化準(zhǔn)則,存在著過擬合現(xiàn)象,導(dǎo)致算法的泛化性能差,并且訓(xùn)練過程受局部極小點(diǎn)的困擾。基于統(tǒng)計(jì)學(xué)習(xí)理論[6]的支持向量機(jī)SVM(Support Vector Machine)方法,其訓(xùn)練過程遵循的是結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則,不易發(fā)生局部最優(yōu)及過擬合現(xiàn)象,能夠很好的克服神經(jīng)網(wǎng)絡(luò)的上述缺陷,非常適合非線性的隨機(jī)序列動(dòng)態(tài)建模[7]。
本文通過對(duì)隨機(jī)漂移序列進(jìn)行相空間重構(gòu),將回歸支持向量機(jī)用于陀螺儀隨機(jī)漂移的預(yù)測(cè)和補(bǔ)償,以探索新的更加有效的隨機(jī)漂移補(bǔ)償方法。
1 支持向量機(jī)預(yù)測(cè)模型
支持向量機(jī)是建立在統(tǒng)計(jì)學(xué)習(xí)理論的VC維理論和結(jié)構(gòu)風(fēng)險(xiǎn)最小化準(zhǔn)則的基礎(chǔ)上,根據(jù)有限樣本信息在模型的復(fù)雜度和學(xué)習(xí)能力之間尋求最佳折衷,以期望獲得最好的泛化能力[8]。其基本思想是對(duì)于非線性問題,利用非線性變換將其映射到一個(gè)高維的特征空間中,并在此空間進(jìn)行線性分析,即將低維空間的非線性問題轉(zhuǎn)化為高維特征空間中的線性問題來解決。通常引入一個(gè)核函數(shù)以代替高維空間中的內(nèi)積運(yùn)算,從而巧妙的避免了復(fù)雜的計(jì)算,并且有效地克服了維數(shù)災(zāi)難和局部極值問題。
對(duì)于給定的容量為N的隨機(jī)漂移樣本集T={xk,yk}(k=1,2,…,N;xk∈Rn,yk∈R),其中 xk為輸入變量,yk為相應(yīng)的目標(biāo)值。根據(jù)支持向量機(jī)的基本思想,首先通過非線性變換將輸入空間映射到一個(gè)高維特征空間,在此特征空間中的SVM預(yù)測(cè)模型為:

式中,ω、b和φ(xk)分別為權(quán)值向量、閾值和進(jìn)行空間映射的非線性變換。依據(jù)結(jié)構(gòu)最小化準(zhǔn)則,并考慮偏離點(diǎn)的影響,引入非負(fù)的松弛因子,問題轉(zhuǎn)變?yōu)橛屑s束最優(yōu)問題:
對(duì)于此約束二次規(guī)劃問題,依據(jù)KKT條件,通過引入非負(fù)的拉格朗日乘子α,α*,將問題轉(zhuǎn)化為二次規(guī)劃的對(duì)偶問題:
求解上式可得到所求的預(yù)測(cè)模型:

上式需要計(jì)算高維空間的內(nèi)積,當(dāng)維數(shù)很高時(shí)計(jì)算量巨大,造成所謂的維數(shù)災(zāi)難。引入核函數(shù)K(xk,x)來代替內(nèi)積的計(jì)算,即

核函數(shù)接受低維的輸入而計(jì)算高維的內(nèi)積,可以有效的避免維數(shù)災(zāi)難。根據(jù)泛函理論,滿足Mercer條件的函數(shù)都可以作為核函數(shù)。很多研究和實(shí)驗(yàn)表明:當(dāng)缺少過程的先驗(yàn)知識(shí)情況下,選擇徑向基核函數(shù)比選擇其他核函數(shù)預(yù)測(cè)性能好。在對(duì)各種常用核函數(shù)預(yù)測(cè)效果對(duì)比的基礎(chǔ)上,本文選擇了徑向基核函數(shù) K(x,xi)=exp(-‖x-xi‖2/σ2)。
2 支持向量機(jī)預(yù)測(cè)模型的建立
2.1 相空間重構(gòu)
陀螺的隨機(jī)漂移是一維的標(biāo)量時(shí)間序列,需要通過相空間重構(gòu),把標(biāo)量時(shí)間序列嵌入到一個(gè)輔助的相空間中,以得到滿足支持向量機(jī)要求的訓(xùn)練和測(cè)試序列。
由Takens嵌入定理[9]可知:如果嵌入維的維數(shù)m≥2D2+1,D2是系統(tǒng)的維數(shù),則通過相空間重構(gòu)的得到的系統(tǒng)與原始系統(tǒng)是等價(jià)的。對(duì)于標(biāo)量時(shí)間序列:{x(i)},i=1,2,…N,由延遲坐標(biāo)相空間重構(gòu)法得到的重構(gòu)序列為:
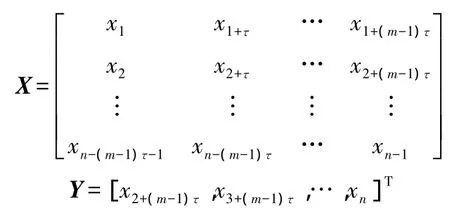
其中m和τ分別為嵌入維數(shù)和延遲時(shí)間,對(duì)一個(gè)序列進(jìn)行相空間重構(gòu)關(guān)鍵是要確定這兩個(gè)參數(shù)。嵌入維數(shù)m表征吸引子的空間間隔和幾何不變量;延遲時(shí)間τ反映了任意兩個(gè)相鄰延遲坐標(biāo)點(diǎn)的相關(guān)程度。m和τ的不恰當(dāng)配對(duì)將影響重構(gòu)后的相空間結(jié)構(gòu)與原空間的等價(jià)關(guān)系。本文使用的C-C法是通過引入嵌入窗寬τw=(m-1)τ將m和τ統(tǒng)一起來的。C-C法基于大量的統(tǒng)計(jì)結(jié)果產(chǎn)生,計(jì)算量少、計(jì)算速度快,計(jì)算結(jié)果理想,并且魯棒性能和抗噪聲性能尤其突出,是最為廣泛使用的計(jì)算時(shí)間窗的方法。
2.2 核函數(shù)參數(shù)和SVM參數(shù)的選擇
支持向量機(jī)模型中,待確定的參數(shù)為不敏感系數(shù)ε、懲罰系數(shù)C和徑向基核函數(shù)中的參數(shù)σ,這幾個(gè)參數(shù)在模型的訓(xùn)練過程中都是定值,需要訓(xùn)練前事先確定。常用的方法有交叉驗(yàn)證法、基于VC維的誤差估計(jì)和LOO誤差估計(jì)[10-11]。本文使用的k-折交叉驗(yàn)證法,對(duì)于中等規(guī)模的問題而言,是最為可靠的參數(shù)選擇方式。
統(tǒng)計(jì)學(xué)習(xí)理論中,通過比較算法的泛化能力來評(píng)價(jià)支持向量機(jī)的好壞,即檢驗(yàn)?zāi)P蛯?duì)測(cè)試集的預(yù)測(cè)精度來衡量該模型的優(yōu)劣。本文使用的誤差指標(biāo)為均方根誤差:

即所有格點(diǎn)中,均方根誤差最小的格點(diǎn)處對(duì)應(yīng)的參數(shù)為所尋找的最優(yōu)參數(shù)組合。
3 支持向量機(jī)預(yù)測(cè)模型的實(shí)驗(yàn)驗(yàn)證
3.1 實(shí)驗(yàn)方法和步驟
采集一組MEMS陀螺儀STIM202的靜態(tài)數(shù)據(jù),經(jīng)過確定性誤差補(bǔ)償和小波閾值去噪,得到表征陀螺儀隨機(jī)漂移的時(shí)間序列。當(dāng)樣本容量大于3 000時(shí),C-C法尋找最優(yōu)相空間重構(gòu)參數(shù)的效果較好,因此取該時(shí)間序列中長度為3 500的一段序列作為實(shí)驗(yàn)數(shù)據(jù)。以前500個(gè)樣本點(diǎn)為訓(xùn)練集訓(xùn)練模型,用后2 000個(gè)樣本點(diǎn)做測(cè)試。實(shí)驗(yàn)步驟如下:
(1)相空間重構(gòu)
首先對(duì)此標(biāo)量時(shí)間序列進(jìn)行相空間重構(gòu),得到符合要求的訓(xùn)練集和測(cè)試集。利用C-C法求解最優(yōu)的嵌入維數(shù)m和延遲時(shí)間τ。得到時(shí)間窗τw=13,延遲時(shí)間τ=4,計(jì)算可得嵌入維數(shù)m=4。
(2)樣本歸一化
支持向量機(jī)對(duì)零均值方差為1的數(shù)值最敏感,為了減小模型訓(xùn)練誤差,對(duì)重構(gòu)后的訓(xùn)練集和測(cè)試集進(jìn)行歸一化處理:
(3)核函數(shù)參數(shù)和SVM參數(shù)的選擇
使用k-折交叉驗(yàn)法尋找最優(yōu)參數(shù),k取5,誤差評(píng)價(jià)指標(biāo)為均方根誤差RMSE,得到的最優(yōu)參數(shù)組合為(C,σ,ε)=(0.329 88,21.112 1,0.094 6)。
(4)模型的訓(xùn)練和測(cè)試
利用上步得到的最優(yōu)參數(shù)組合,通過SMO[12]算法訓(xùn)練SVM模型,并對(duì)訓(xùn)練得到的模型進(jìn)行測(cè)試。為了說明SVM模型的有效性,還分別使用了最大Lyapunov指數(shù)法、一階加權(quán)局域法和RBF神經(jīng)網(wǎng)絡(luò)法對(duì)重構(gòu)樣本做了訓(xùn)練和預(yù)測(cè)。
3.2 實(shí)驗(yàn)結(jié)果及分析
圖1為最大Lyapunov指數(shù)法和一階加權(quán)局域法的預(yù)測(cè)結(jié)果。由于這兩種方法預(yù)測(cè)速度很慢,所以只用來預(yù)測(cè)了50步。從圖中可以看出,但這兩種方法對(duì)陀螺隨機(jī)漂移的預(yù)測(cè)都不太理想。
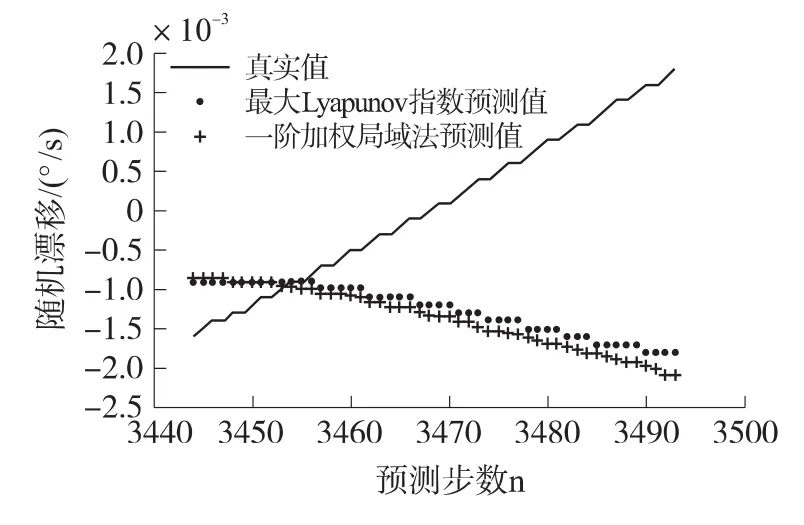
圖1 最大Lyapunov指數(shù)法和一階加權(quán)局域法的預(yù)測(cè)結(jié)果
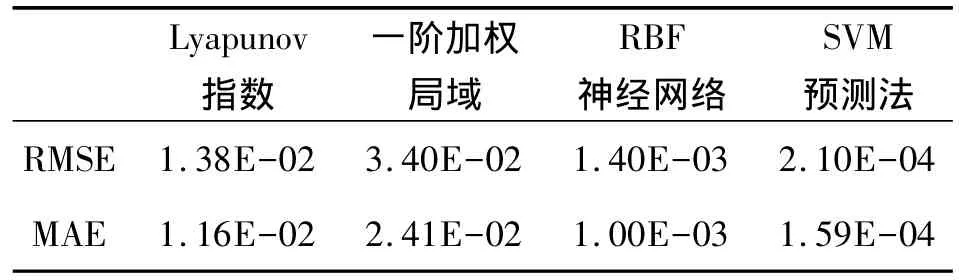
表1 幾種方法對(duì)測(cè)試集的預(yù)測(cè)結(jié)果
圖2和圖3所示分別為RBF神經(jīng)網(wǎng)絡(luò)方法與SVM法對(duì)訓(xùn)練集的預(yù)測(cè)絕對(duì)誤差和對(duì)測(cè)試集的預(yù)測(cè)效果,表1記錄了4種方法對(duì)測(cè)試集預(yù)測(cè)的均方根誤差RMSE和平均絕對(duì)誤差MAE。從以上圖表可得到結(jié)論:
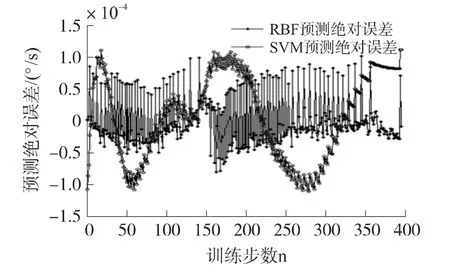
圖2 RBF法和SVM法對(duì)訓(xùn)練集的預(yù)測(cè)絕對(duì)誤差
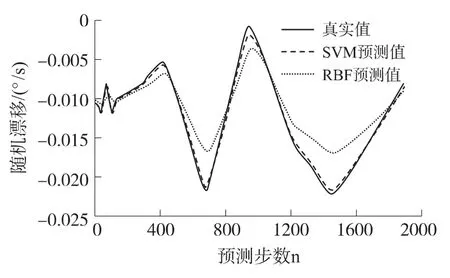
圖3 RBF法和SVM法對(duì)測(cè)試集的預(yù)測(cè)結(jié)果
(1)對(duì)于相同的訓(xùn)練集,RBF神經(jīng)網(wǎng)絡(luò)法和SVM法相比,具有更高的訓(xùn)練精度。
(2)對(duì)于相同的測(cè)試集,SVM法比RBF神經(jīng)網(wǎng)絡(luò)法的預(yù)測(cè)效果要好,能夠更好的預(yù)測(cè)出陀螺隨機(jī)漂移的變化趨勢(shì)。
(3)SVM法的預(yù)測(cè)誤差隨著預(yù)測(cè)步數(shù)的增加而不斷增大。
造成以上結(jié)果的原因是:RBF神經(jīng)網(wǎng)絡(luò)法是一種基于風(fēng)險(xiǎn)經(jīng)驗(yàn)最小化準(zhǔn)則的學(xué)習(xí)算法,它的訓(xùn)練過程力求對(duì)訓(xùn)練集做到最好的擬合,而忽視了模型結(jié)構(gòu)固有的置信風(fēng)險(xiǎn),因此預(yù)測(cè)效果受到模型自身缺陷的限制。SVM法以結(jié)構(gòu)風(fēng)險(xiǎn)最小為學(xué)習(xí)準(zhǔn)則,既兼顧訓(xùn)練集的擬合精度,又重視置信風(fēng)險(xiǎn)的減小,因而具有較好的泛化能力,能取得更好的預(yù)測(cè)效果。
由于陀螺隨機(jī)漂移時(shí)間序列的非線性和弱時(shí)變特征,造成訓(xùn)練模型的預(yù)測(cè)精度隨預(yù)測(cè)步數(shù)的增加而增大,訓(xùn)練得到的模型只能做短時(shí)預(yù)測(cè)。為了提高全程的預(yù)測(cè)精度,每隔一定時(shí)間以新加入的樣本為訓(xùn)練集,而對(duì)于器件的同一次工作,可以保持模型的各個(gè)參數(shù)不變,重新訓(xùn)練預(yù)測(cè)模型。3個(gè)軸向的模型訓(xùn)練可以間隔進(jìn)行,模型的訓(xùn)練耗時(shí)很少,對(duì)系統(tǒng)的正常工作的實(shí)時(shí)性影響不大。
4 總結(jié)
本文將基于機(jī)器學(xué)習(xí)理論的支持向量機(jī)法,用于MEMS陀螺儀隨機(jī)漂移的建模和補(bǔ)償。通過相空間重構(gòu)將問題轉(zhuǎn)換為支持向量機(jī)所需要的形式,利用最優(yōu)化算法求得了相空間重構(gòu)、核函數(shù)和預(yù)測(cè)模型的各項(xiàng)參數(shù)。仿真結(jié)果表明,該方法克服了傳統(tǒng)方法的不足,能夠很好的預(yù)測(cè)陀螺的隨機(jī)漂移,可以用于實(shí)際工程中MEMS陀螺儀隨機(jī)漂移的補(bǔ)償。
[1]張英,戚紅向.航天慣導(dǎo)產(chǎn)品及技術(shù)發(fā)展簡介[J].航天標(biāo)準(zhǔn),2010(3):40-43.
[2]陳殿生,邵志浩,雷旭升.MEMS陀螺儀隨機(jī)誤差濾波[J].北京航空航天大學(xué)學(xué)報(bào),2009,35(2):246-250.
[3]方靜,尚捷,顧啟泰.光纖陀螺隨機(jī)誤差建模的實(shí)驗(yàn)研究[J].傳感技術(shù)學(xué)報(bào),2008,21(9):1514-1517.
[4]李杰,張文棟,劉俊.基于時(shí)間序列分析的Kalman濾波方法在MEMS陀螺儀隨機(jī)漂移誤差補(bǔ)償中的應(yīng)用研究[J].傳感技術(shù)學(xué)報(bào),2006,19(5):2215-2219.
[5]盧海曦,夏敦柱,周百令.基于遺傳小波神經(jīng)網(wǎng)絡(luò)的MEMS陀螺誤差建模[J].中國慣性技術(shù)學(xué)報(bào),2008,16(2):216-219.
[6]Vapnik V N.The Nature of Statistical Learning Theory[M].New York:Springer-Verlag,1995:35-46.
[7]趙志宏,楊紹普.基于SVM的混沌時(shí)間序列分析[J].動(dòng)力學(xué)與控制學(xué)報(bào),2009,7(1):5-8.
[8]Smola A J,Schoelkopf B.A Tutorial on Support Vector Regression[J].Statistics and Computing,2004(14):199-222.
[9]呂金虎.混沌時(shí)間序列分析及其應(yīng)用[M].武漢:武漢大學(xué)出版社,2002:66-71.
[10]Ito K,Nakano R.Optimizing Support Vector Regression Hyper-Parameters Based on Cross Validation[J].Proceedings of the International Joint Conference on Neural Networks,2003(7):2077-2082.
[11]王曉蘭,康蕾.在線模糊最小二乘支持向量機(jī)的時(shí)間序列預(yù)測(cè)[J].計(jì)算機(jī)工程與應(yīng)用,2010,46(9):215-240.
[12]Keerthi S,Shevade S K.SMO Algorithm for Least-Squares SVM Formulation[J].Neural Computation,2003,15(2):487-507.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19