無線傳感器網絡中基于粒子濾波的人員跟蹤方法*
2012-06-12 09:36:22李紅春趙曉光
傳感技術學報 2012年6期
李紅春,趙曉光,譚 民
(中國科學院自動化研究所,復雜系統智能控制與管理國家重點實驗室,北京100190)
人員跟蹤是很多應用中的關鍵技術,如虛擬現實、智能空間、室內監控等。無線傳感器網絡作為一種新興的技術,為實現人員跟蹤提出了新的方向,并因為其固有的特點,為跟蹤系統的應用提供了便利。無線傳感器網絡具有無處不在的特點,可以廣泛地分布在各種復雜環境中。同時,結合RFID技術,可以對網絡中跟蹤的物體實現一種智能標簽,自動完成對跟蹤對象的標識。另外,可以根據具體應用的場景,在跟蹤系統中融合各種各樣的傳感器,克服復雜環境條件對跟蹤系統的影響。
目前,已經廣泛開展了基于無線傳感器網絡的定位系統的研究[1-8]。文獻[1]中的室內定位系統,利用無線傳感器網絡融合了陀螺儀、加速度計、磁力計等多種傳感器實現了對人員的定位和運動監控。基于信號強度的定位技術是另一個研究熱點。信號強度是網絡通信過程中必然產生的信息。利用它進行定位,無需其他專門的測距傳感器,可以降低系統的成本,減小網絡中節點的尺寸,減低能量消耗等。RADAR系統[2]是一種基于Wifi的室內定位系統。定位過程中,它首先通過離線采集建立射頻地圖數據庫,然后在定位階段將采集到的射頻指紋與射頻地圖中的射頻指紋進行比較,取距離最近的位置作為未知節點的位置。RADAR系統在室內實驗中得到的平均定位誤差為2 m~3 m。文獻[3-4]對射頻指紋進行了擴展,使用節點在某個位置的信號強度分布表示射頻指紋,將定位問題看成分類問題,利用統計學習方法解決定位問題。文獻[2-4]的方法雖然能獲得比較高的定位精度,但是都需要大量的準備工作,采集環境中的信號強度信息,給實際應用帶來了困難。為了解決這一困難,文獻[5-6]開展了利用信道模型進行定位和跟蹤的工作。文獻[5]通過大量實驗驗證了基于信號強度測距進行人員跟蹤的性能。文中利用信號強度模型(1)估算出節點的距離后,然后利用CFS方法對節點進行定位,最后分別比較了多種卡爾曼濾波的跟蹤效果,論文中的室內人員跟蹤誤差為2.5 m~5 m。文獻[6]提出利用粒子濾波方法解決跟蹤問題。由于信號強度具有的不穩定性,使用信號強度估計的距離往往帶有很大的誤差。針對該問題,文獻[6]提出RSS-MCL方法,直接使用信號模型通過粒子濾波實現對未知節點的跟蹤,避免了利用信號強度進行距離估計帶來的誤差。
無線信號在傳播過程中會受到多種因素的影響,使其信號強度發生改變。當節點由人攜帶時,人體對信號強度也會產生影響。特別是當人體擋在兩個通訊節點之間時,它們之間的信號強度會明顯小于未遮擋時的信號強度。傳統的自由空間模型(1)不能準確描述有人環境下的信道特性。本文通過實驗建立了一種新的針對有人環境的信道模型,然后利用該模型采用粒子濾波方法實現了對人員的跟蹤。
論文的內容安排如下:第1節對論文研究的問題進行了描述,主要解釋跟蹤問題與定位問題的不同;第2節中介紹了有人環境下的信道模型,給出了已有研究成果和本文提出的信道模型;第3節對粒子濾波技術作了簡單介紹,然后給出了利用第2節所提出的信號模型進行人員跟蹤的算法;第4節和第5節分別對本文提出的算法進行了仿真和實驗驗證;最后,第6節給出結論。
1 人員跟蹤問題描述
基于無線傳感器網絡的人員跟蹤系統由參考節點(Reference Node)和目標節點組成。在環境中布置的位置已知的節點,稱為參考節點。被跟蹤人員攜帶的傳感器節點,稱為目標節點。目標節點在運動過程中,可以與若干個參考節點進行通信。節點通信時的信號強度能夠反映它們之間的距離信息。本文就是研究利用這些信號強度對目標節點進行跟蹤的問題。另外,論文中描述的跟蹤系統中只有一個目標節點,不考慮環境中有多個人時對信號強度的影響。
人員跟蹤系統可以從動態系統的角度進行分析。目標節點與參考節點之間的信號強度RSS={rss1,rss2,…,rssN}是系統的觀測量,其中,rssi為目標節點與第i個參考節點通信時的信號強度,N為參考節點的個數。目標節點的位置X=(x,y)為系統的狀態量。跟蹤系統需要周期性地獲取觀測量,在t時刻測量的信號強度用 RSS(t)表示,狀態用X(t)表示。RSS(t)={RSS(1),RSS(2),…,RSS(t)}表示節點在t時刻之前獲得的全部觀測信息,X(t)={X(1),X(2),…,X(t)}表示節點在 t時刻之前經過的位置。不同時刻之間的位置具有馬氏性,即t時刻的位置只受前一時刻的影響,可以用條件概率的形式表示為p(X(t)|X(t-1))=p(X(t)|X(t-1))。如果忽略t時刻之前的觀測量和已估計出來的狀態量,直接從當前觀測量RSS(t)估計當前的目標節點的位置X(t),稱為定位問題。考慮不同時刻觀測量之間的關系,即從RSS(t)估計X(t)的問題,稱為跟蹤問題。后者是本文研究的問題。
一種最直觀地解決跟蹤問題的思路是,使用定位方法直接利用t時刻測量值RSS(t)估計t時刻的位置X(t)。該方法忽略了不同時刻測量值之前的聯系,沒有充分利用已知的信息,不能獲得很好的定位效果[5]。本文利用粒子濾波通過目標節點的運動模型,將t時刻前的狀態信息與當前的測量值聯系起來,可以降低定位的計算量,提高跟蹤的精度。
2 有人環境的信道模型
無線信號在傳播過程中信號強度會受到多種因素的影響而發生衰減。隨著傳播距離的增加,無線信號強度發生衰減的現象稱為路徑衰減效應。當傳播路徑上有遮擋物時,無線信號會發生反射、折射和衍射等現象,使得信號強度發生波動,稱為陰影效應。信號的接收端收到從不同傳播路徑到達的信號時,由于不同信號之間相位的差異,它們的疊加對信號強度產生消減或增強作用,稱為多徑效應。式(1)所示模型是一種比較常用的信道傳播模型,對路徑衰減效應和陰影效應進行了建模[9]。

其中,P(d)表示信號接收端與發送端相距d時接收到的信號強度,Pref為參考信號強度,K稱為路徑衰減系數。一般地,Pref和K可以通過距離與信號強度的實驗曲線擬合獲得。δ是服從正態分布N(0,σ2δ)的隨機變量,用來描述陰影效應引起的信號強度的波動。
人體的70%由水組成,會對無線信號的傳播產生比較大的影響。所以,式(1)模型不能準確描述有人環境的信道模型。目前,已有研究者開展了關于有人環境下信道特性的研究[10-13]。文獻[10]設計實驗研究了體域網的信道特性。實驗結果表明,體域網內的信號衰減比空氣中的信號衰減更為嚴重,信號頻率的增加也會增大信號的衰減。另外,文獻[10]利用實驗分析了采用不同調制方法的無線信號的傳播和通信性能。文獻[11]通過實驗分析了符合IEEE 802.15.4標準的868 MHz的無線信號在體域網中信號強度的統計特性和多徑效應的噪聲分布。文獻[12]對符合 IEEE 802.15.4 標準的2.4 GHz的無線信號進行了實驗分析,在視距LOS(Line of Sight)和非視距NLOS(Non Line of Sight)情況下均驗證了路徑衰減效應。實驗結果也表明NLOS情況下,路徑衰減比LOS更嚴重。另外,還發現不同人的遮擋對信道特性沒有顯著影響。目前已有的研究只給出了有人環境下無線信號的傳播特性,沒有提出明確的模型描述。
人體遮擋對信號強度的影響最為嚴重。當人體沒有擋在通信節點之間時,信號可以沿著視距的路徑傳播;當人體擋在通信節點之間時,信號的傳播路徑是非視距的。顯然,對于同一個位置,前者的信號強度要大于后者。兩種情況不能采用同一個模型進行描述。根據式(1)模型,可以分別對LOS和NLOS的信道特性進行建模。LOS方式下的信道模型為:

NLOS方式下的信道模型為:

模型式(2)、模型式(3)與模型式(1)的形式相同,參數表示的意義可以通過類比得到。模型中的參數可以通過實驗獲得。
本文設計實驗分析了有人環境下的信號傳播特性,并通過實驗曲線擬合得到了信道模型式(2)和模型式(3)的參數。實驗中使用1個發送節點和1個接收節點。接收節點固定在高度為H的三角架上;發送節點置于人的胸前,高度也為H。接收節點收到發送節點發送來的數據包,記錄數據包的信號強度,并將信號強度信息通過串口發送至與它相連的電腦上。實驗開始后,以LOS和NLOS兩種方式測量節點間的信號強度。LOS方式下,實驗者攜帶著發送節點從距離接收節點0 m處,以速度v勻速遠離接收節點至d m;NLOS方式下,實驗者攜帶著發送節點從距離接收節點d m,以速度v接近接收節點至0 m。LOS方式下,實驗者擋在發送節點和接收節點之間,對信號傳播有遮蔽作用;NLOS方式下,實驗者只是在發送節點附近,沒有遮蔽作用,但是由于陰影效應也會對信號強度產生影響。
實驗中使用的節點是一種基于MicaZ節點[14]開發的。但是,與MicaZ不同的是實驗節點的天線是PCB 天線。實驗參數如下:H=1.2 m,d=40 m,v=0.8 m/s。實驗獲得的數據如圖1所示。顯然,LOS和NLOS情況下,信號強度與節點間距離的關系不同。但是,曲線的趨勢仍與模型(1)類似。所以,本文截取0~20 m的數據,進行均值濾波后,采用針對LOS和NLOS的數據分別進行最小二乘法擬合,獲得相應的信號強度與距離的關系曲線,如圖1所示。
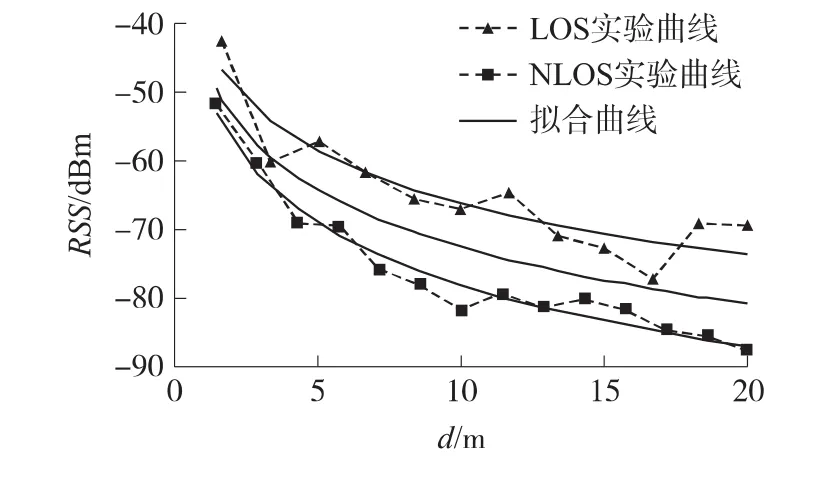
圖1 有人環境下信號強度與距離的關系曲線
為了作為參照,對LOS和NLOS的所有數據進行最小二乘擬合,得到有人環境下信道模型的單一曲線描述,見式(4)。

實驗后,得到的模型參數分別為 PLOS,ref=-52.92,KLOS=-25.77,PNLOS,ref=-45.27,KNLOS=-21.95,PMean,ref=-45.27,KMean=-23.95。
3 人員跟蹤算法
本節首先從Bayesian估計的角度對基于信號強度的人員跟蹤問題進行了分析,并介紹了粒子濾波的基本思路;然后,分別給出人員跟蹤問題的狀態轉移模型和似然概率模型;最后,給出利用粒子濾波進行人員跟蹤的算法步驟。
3.1 Bayesian 估計問題
粒子濾波是一種基于Monte Carlo方法和遞推Bayesian 估計的統計濾波方法[15-17]。從 Bayesian 估計的角度看,目標節點與參考節點之間的信號強度RSS(t)是觀測量,目標節點的位置X(t)為系統的狀態量。人員跟蹤問題就是從觀測量RSS(t)估計系統狀態X(t)的問題。
根據Bayesian估計理論,目標位置的最小二乘估計 ^X(t)可以用式(5)表示。

其中,p(X(t)|RSS(t))表示獲得觀測量為RSS(t)的情況下,目標節點的位置為X(t)的條件概率。在人員跟蹤問題中,p(X(t)|RSS(t))的形式非常復雜,很難用解析式表達出來,所以式(5)的積分不能通過解析的形式求解。
粒子濾波采用Monte Carlo方法以數值計算的形式來求解式(5)。根據Monte Carlo仿真中的重要性采樣技術,p(X(t)|RSS(t))可以用式(6)近似[15]。

其中,δ(·)為Dirac函數。每一對離散取值(Xi(t),Wi(t))稱為一個粒子,Wi(t)=p(Xi(t)|RSS(t))表示粒子的權重。不同于平均取樣,X(t)的取樣與p(X(t)|RSS(t))的大小有關。在p(X(t)|RSS(t))概率越大的區域,X(t)的取樣越密集;反之,X(t)的取樣稀疏,這稱之為重要性采樣。
粒子Xi(t)的權重Wi(t)可以用遞推的形式表示
其中,q(Xi(t)|Xi(t-1),RSS(t-1))是重要性采樣中的重要性函數。本文采用的是BootStrap粒子濾波器,q(Xi(t)|Xi(t-1),RSS(t-1))用系統的狀態轉移概率來表示[15],見式(9)。

當獲得Np個可以近似后驗概率p(X(t)|RSS(t))的粒子后,式(5)的積分可以用式(10)中有限項的和表示,其中^X(t)為粒子濾波獲得的目標節點的位置,符合最小二乘估計。

3.2 狀態轉移模型
在粒子濾波中,狀態轉移模型是計算粒子的權重所必需的。在t時刻未獲得觀測量RSS(t)之前,對跟蹤目標所知道的信息是它在t時刻之前所經歷的位置,用X(t-1)表示。狀態轉移模型就是利用X(t-1)對目標的t時刻的位置進行預測。根據位置信息的之間的馬氏性,跟蹤目標在t時刻所在的位置只跟前一刻所在的位置有關,即只跟X(t-1)有關。
狀態轉移模型假設已知目標節點運動的最大速度vmax,X(t)均勻地分布在以 X(t-1)為圓心,以 vmaxΔT 為半徑的圓內。所以,狀態轉移概率可以用式(11)表示。

其中,ΔT為采樣周期。
3.3 似然概率模型
粒子濾波中,計算粒子的權重還需要似然概率模型,即計算似然概率p(RSS(t)|X(t))。有人環境下的信號強度模型比較復雜,下面首先分析節點的運動與信號強度的關系。
由第2節的介紹可知,作為觀測量的信號強度受到節點間距離和人體遮擋的影響。假定目標節點t時刻的位置為X(t),遮擋情況用O(t)表示,其中X(t)=(x(t),y(t))為目標節點在二維空間的坐標,O(t)={o1(t),o2(t),…,oN(t)},oi(t)表示目標節點與第i個參考節點之間的遮擋關系。如果人遮擋在目標節點與第i個參考節點之間,則oi(t)=1;否則,oi(t)=0。
在圖2中,定位目標從X(t-1)移動到X(t),運動的方向可以用ΔX(t)=X(t)-X(t-1)表示。顯然,如果運動方向ΔX(t)與參考節點相對于目標當前位置的連線ΔXN=XN-X(t)的夾角θ小于π/2,則跟蹤目標沒有遮擋參考節點,如圖2中的參考節點A;如果θ大于π/2則跟蹤目標遮擋住了參考節點,如圖2中的參考節點B。因此,可以用下面的公式計算目標節點與參考節點之間是否有人遮擋。
其中,<·,·>表示兩個向量的內積,‖·‖2表示向量的歐式距離。

圖2 運動方向對信號的遮擋
假設t時刻測量到的節點之間的信號強度值為RSS'(t)={rss'1,rss'2,…,rss'N},其中,rss'i為目標節點到第i個參考節點的信號強度值。在狀態X(t)時,觀測到RSS'(t)的似然概率可以表示為

其中,rssi為從信道模型獲得定位目標相對于第i參考節點的信號強度的理論值。LOS和NLOS情況下,信道模型的描述有差異。本文根據式(15)選擇不同的信道模型。

3.4 跟蹤算法步驟
基于粒子濾波的人員跟蹤算法的具體步驟如下:
(1)初始化 在整個跟蹤區域內均勻采樣,獲得Np個初始粒子,位置分別為 Xi(0),權重分別為Wi(0)=1/Np;
(2)狀態轉移 根據式(11)獲得t時刻的位置 X(t),Wi(t)=Wi(t-1);
(3)更新權重 根據式(7)、式(8)更新粒子的權重Wi(t);
(5)獲得最優估計值 根據式(10)計算t時刻目標節點的最優的估計位置^X(t),然后進入狀態轉移的步驟(2),估計下一時刻的位置。
4 性能仿真
為了驗證本文提出算法的有效性,本節設計了仿真實驗,并與RSS-MCL跟蹤方法進行了比較。仿真實驗在L×W的區域布置了一個包括N個參考節點的無線傳感器網絡。為了便于控制已知節點之間的距離,它們等間隔地布置在仿真區域內。節點在長度方向的間隔為ΔL,在寬度方向的間隔為ΔW。節點的通訊距離設為50 m。仿真中,評價跟蹤效果的指標為均方根誤差RMSE(Root Mean Square Location Error)。

其中,Xi為實際的位置坐標,^Xi為估計的位置坐標。
4.1 跟蹤精度比較
為了直觀地比較定位算法的效果,作者首先設計了一個30 m×30 m的實驗場景,并布置了4個參考節點,它們的位置分別為{(15,15),(-15,15),(15,-15),(-15,-15)},如圖 3。仿真時,信道模型的噪聲的標準差設為1.5,人的運動軌跡是一個逆時針的圓形路徑,仿真的結果見圖3。
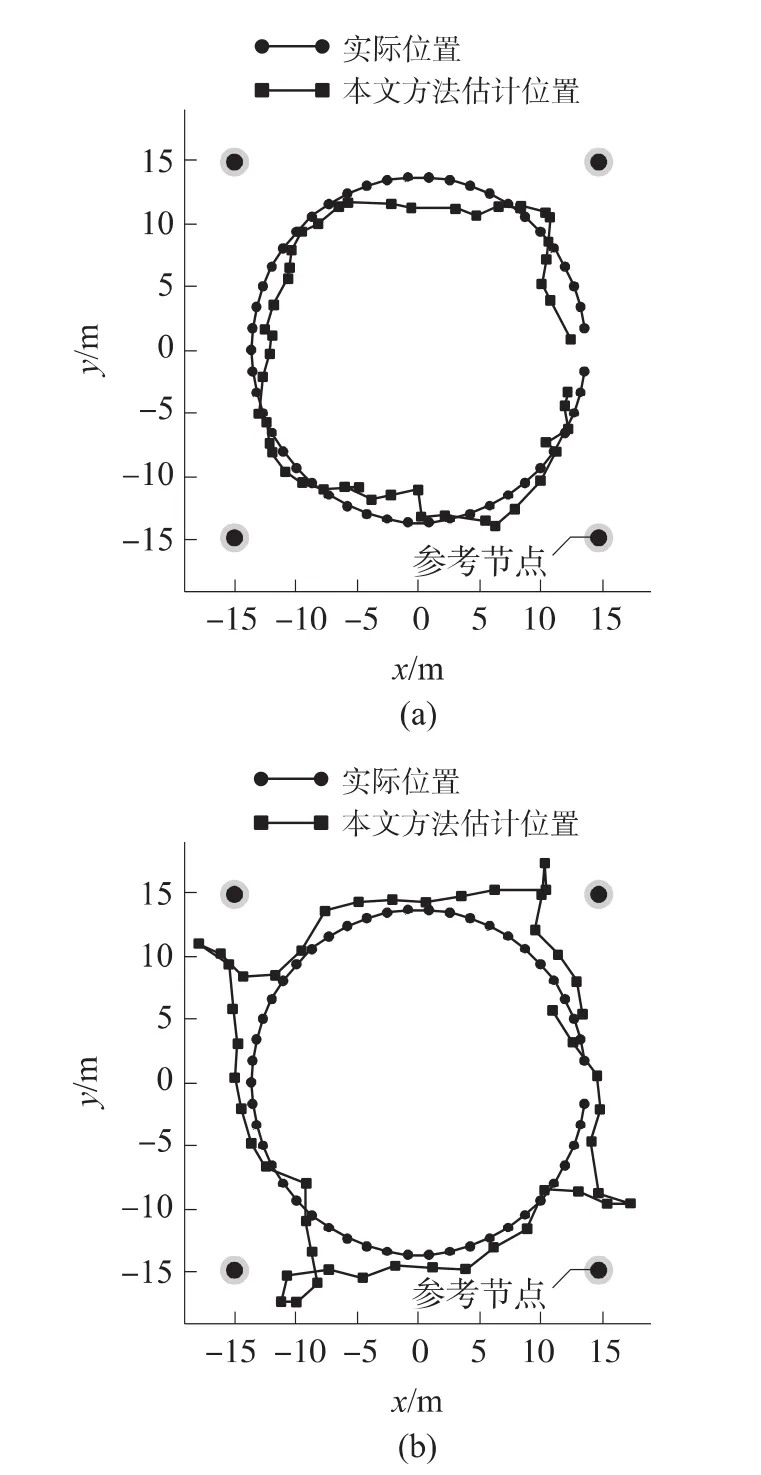
圖3 圓形軌跡的跟蹤精度比較
圖3(a)中給出本章提出的跟蹤方法跟蹤效果,圖3(b)是RSS-MCL算法的跟蹤結果。顯然,從直觀上看,本章方法的跟蹤效果明顯優于RSS-MCL方法。圖3(b)中,有4個明顯的跟蹤效果比較差的位置。這些位置都位于人的運行方向發生轉變,導致人攜帶的節點與參考節點之間的遮擋關系改變的地方。由于本文提出的跟蹤方法考慮了人的遮擋因素,所以在節點之間的遮擋關系發生改變時,沒有產生大幅度偏離真實路徑的現象。圖3(a)和圖3(b)的均方根跟蹤誤差分別為0.27 m和0.93 m。
人運動軌跡的模式與機器人、汽車等設備的運動模式有很大的區別[18-20]。為了在更嚴苛的條件下驗證人員跟蹤算法的性能,需要設計符合人的運動特征的運動軌跡模型。文獻[18-20]對人在室內環境中運動的軌跡的特點進行了研究,認為在人的運動軌跡中存在若干熱點,人從不同的位置到達熱點后做一定時間的停留。根據這一特點,本文設計了一種運動軌跡模型,用來模擬人的運動軌跡。運動軌跡由 M條路徑組成。路徑 i可以用(Ps(i),Pd(i),Vm(i),Tp(i))表示,其中,Ps(i)表示路徑i起始點的位置,Pd(i)表示該路徑i終點的位置,Vm(i)表示人在路徑i上運動的速度,Tp(i)表示人到達路徑的終點后停留的時間。人在路徑i上運動時,沿著Ps(i)與Pd(i)之間的直線以Vm(i)勻速行走,到達終點后停留Tp(i)秒,然后開始走向下一條路徑。兩個相鄰的不同路徑首尾相連,即路徑i-1的終點是路徑i的起始點,Ps(i)=Pd(i-1)。路徑i的終點Pd(i)按照均勻分布從仿真區域中隨機選擇。對于初始路徑,它的起始位置Ps(0)也是從仿真區域中按照均勻分布隨機選擇。運動的速度Vm(i)均勻分布在(Vmin,Vmax)之間,Tp均勻分布在(0,Tmax)之間。
在仿真實驗中,取如下的參數:Vmin=0.5 m/s,Vmax=2.0 m/s,Tmax=10 s。
仿真中使用的運動模型和仿真場景的描述如前所述,共有16個參考節點等間隔地分布在100 m×100 m的環境中,信號噪聲的標準差設為3.0。仿真中利用運動模型生成人運動的路徑,利用模型獲得目標節點在當前位置與參考節點之間的信號強度,最后將信號強度值分別利用本文提出的方法和RSS-MCL方法進行跟蹤。仿真中兩種方法的使用了相同的運動路徑和信號強度,所以仿真結果具有可比性。
圖4中每個點表示在i條運動路徑上跟蹤算法的最小二乘跟蹤誤差。其中,跟蹤誤差進行了歸一化處理,用RMSE與節點的通訊距離的比值表示。文獻[6]中RSS-MCL的仿真結果中跟蹤誤差比較穩定,但是圖3中不同的路徑上跟蹤誤差有波動,這是由于運動模型的不同造成的。本文中采用的跟蹤模型更接近實際情況,每條路徑(Ps(i),Pd(i),Vm(i),Tp(i))中有多個隨機參數,運動的長度,方向和運動速度均有不同,因此造成了每條路徑跟蹤誤差的變化。根據仿真結果,本文提出的方法上比RSS-MCL方法的平均跟蹤精度提高56.2%。
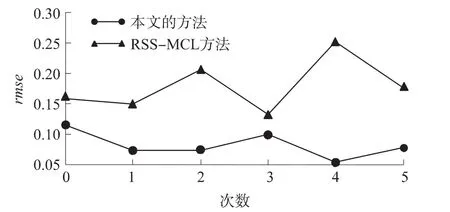
圖4 跟蹤精度比較
4.2 參考節點距離的影響
參考節點之間的距離是影響跟蹤精度的重要因素之一。當參考節點的距離越近,網絡的密度越大,未知節點與更多的參考節點進行通訊,獲得更多的信號強度信息,因此可以獲得更好的定位效果。另外,從信號強度模型可以看出,在距離較近處,信號強度模型更加準確。在分析參考節點距離對跟蹤算法的影響中,作者利用第4.1節所述的運動模型生成一系列的運動軌跡,獲得人在行走過程中與參考節點的信號強度,然后利用不同的跟蹤算法估計目標節點的位置。完成一次仿真后,改變環境中參考節點的個數,利用相同的運動軌跡重復上述的仿真過程。
在仿真中,參考節點是等間隔地分布在100 m×100 m環境中,因此不同數目的參考節點對應一個間隔距離。圖5描述了間隔距離與相應的最小二乘跟蹤誤差之間的關系,其中跟蹤誤差和節點的間距都進行歸一化處理,分別用它們與節點的通訊距離的比值表示。顯然,隨著參考節點的間距的增加,兩種方法的跟蹤誤差均有所增加。但是,不管在任何間距情況下,本文提出的方法的跟蹤誤差都小于RSS-MCL的跟蹤誤差。
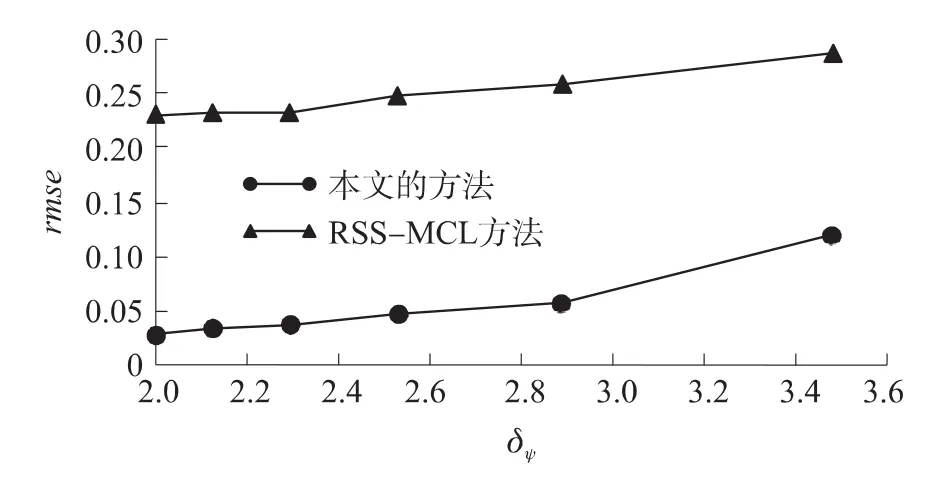
圖5 參考節點的距離對跟蹤精度的影響
4.3 信號強度誤差的影響
信號強度的誤差是影響跟蹤精度的另一個重要因素。在分析參考節點距離對跟蹤算法的影響中,作者利用第4.1節所述的運動模型生成一系列的運動軌跡,獲得人在行走過程中與參考節點的信號強度,然后利用不同的跟蹤算法估計目標節點的位置。完成一次仿真后,改變信號模型中誤差的標準差,利用相同的運動軌跡重復上述的仿真過程。仿真結果如6所示,隨著信號強度噪聲的增加,本文提出的方法的跟蹤誤差逐漸增大。另一方面,RSS-MCL方法的跟蹤誤差沒有因為信號強度噪聲的改變而產生明顯的變化。這是由于RSS-MCL采用的信道強度模型比較簡單,準確性差。即使信號強度的噪聲增大,對模型的準確性沒有產生顯著的影響。
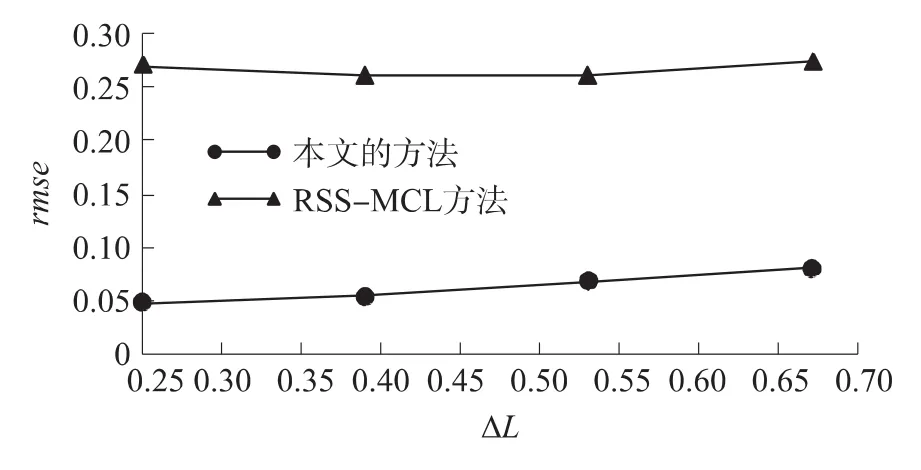
圖6 信號強度噪聲對跟蹤精度的影響
5 室內實驗
本節介紹在室內走廊環境下進行的跟蹤實驗,用以驗證在實際應用中本文提出的跟蹤方法的有效性。實驗在室內走廊環境中進行,如圖7所示。走廊的寬度為2 m,總長度為50 m。參考節點被安裝在高1.1 m的三腳架上,并在長寬方向上分別等間隔地布置,其中長度方向上的間隔為10 m,寬度方向的間隔為1.5 m。實驗開始后,人在胸前掛一個節點,沿著走廊中間運動。運動路徑如圖7所示。人攜帶的節點的高度與參考節點的高度相同,運動速度為0.3 m/s。
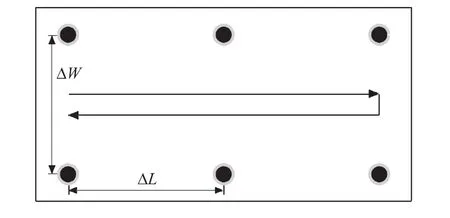
圖7 室內實驗設置
實驗開始后,參考節點以時間ΔT為周期發送一個數據包給移動節點,即人攜帶的節點。移動節點接收到數據包后,記錄數據包的發送者的地址和信號強度。收到全部參考節點的數據包后,將對應的發送者地址和信號強度信息通過串口發送給筆記本電腦。如果在等待參考節點發送數據的時候,收到同一節點的多個數據包,則將這些數據包的信號強度取平均。向電腦發送的數據時,也只發送信號強度的平均值。參考節點的發送數據周期設為500 ms。
實驗中人攜帶著節點沿著直線運動,因為這樣更符合人的一般運動規律。運動過程中,人有突然的轉向,所以運動軌跡不是線性的。實驗中放置了多個固定節點,具有一般無線傳感器網絡的基本特征,而且隨著人的位置改變,不同節點的遮擋關系發生變化。在運動過程中,采集人所攜帶的節點與所有參考節點之間的信號強度值,然后本文提出的方法和RSS-MCL方法進行離線的計算。在計算過程中,兩種方法的粒子數目均設為50。本文提出的方法的跟蹤平均定位誤差為0.64 m,RSS-MCL方法的平均定位誤差為0.98 m,前者比后者提高了34.7%。
6 結論
本文提出了一種基于粒子濾波的室內人員跟蹤算法,利用節點之間的信號強度作為測量量,無需專門的測距傳感器就可以實現人員的跟蹤。信號強度易受到干擾而發生改變,在室內有人環境下受到干擾因素更多。本文提出一種雙曲線模型來描述有人遮擋和無人遮擋情況的信道模型。人員跟蹤算法分別建立信號強度的測量模型和人運動的狀態轉移模型,結合粒子濾波方法實現了對人員的跟蹤。其中,信號強度測量模型考慮了人體對信號的影響,狀態轉移模型融合了人的運動特點。仿真和實驗表明該方法能夠獲得良好的跟蹤效果。
[1] Klingbeil L,Wark T.A Wireless Sensor Network for Real-Time Indoor Localization and Motion Monitoring[C]//International Conference on Information Processing in Sensor Networks,2008:39-50.
[2] Bahl P,Padmanabhan V N.Radar:An In-Building RF-Based User Location and Tracking System[C]//Proceedings of the 19th Annual Joint Conference of the IEEE Computer and Communications Societies,2000(2):775-784.
[3] Brunato M,Battiti R.Statistical Learning Theory for Location Fingerprinting in Wireless LANs[J].Computer Networks,2005,47(6):825-845.
[4] Roos T,Myllymaki P,Tirri H.A Statistical Modeling Approach to Location Estimation[J].IEEE Transactions on Mobile Computing,2002,1(1):59-69.
[5] Schmid J,Beutler F,Noack B,et al.An Experimental Evaluation of Position Estimation Methods for Person Localization in Wireless Sensor Networks[C]//Wireless Sensor Networks of Lecture Notes in Computer Science,Springer Berlin/Heidelberg,2011(6567):147-162.
[6] Wang W D,Zhu Q X.RSS-Based Monte Carlo Localisation for Mobile Sensor Networks[J].IEEE Transactions on Communications,2008,2(5):673-681.
[7] 于寧,萬江文,吳銀鋒.無線傳感器網絡定位算法研究[J].傳感技術學報,2007,20(1):187-192.
[8] 周祖德,胡鵬,劉泉,等.一種基于MDS的無線傳感器網絡快速定位算法[J].傳感技術學報,2007,20(10):2303-2307.
[9] Goldsmith A.Wireless Communications[M].Cambridge University Press,2005:24-42.
[10] Ruiz J A,Jiang Xu,Shimamoto S.Propagation Characteristics of Intra-BodyCommunicationsforBody Area Networks[C]//Proceedings of the 3rd IEEE Consumer Communications and Networking Conference,2006(1):509-513.
[11] Cotton S L,Scanlon W G.Characterization and Modeling of the Indoor Radio Channel at 868 MHz for a Mobile Body Worn Wireless Personal Area Network[J].IEEE Antennas and Wireless Propagation Letters,2007(6):51-55.
[12] Huo H W,Shen W,Xu Y Z,et al.The Effect of Human Activities on 2.4 GHz Radio Propagation at Home Environment[C]//Proceedings of the 2nd IEEE International Conference on Broadband Network Multimedia Technology,2009:95-99.
[13] Miluzzo E,Zheng X,Fodor K,et al.Radio Characterization of 802.15.4 and Its Impact on the Design of Mobile Sensor Networks[C]//Wireless Sensor Networks of Lecture Notes in Computer Science,Springer Berlin/Heidelberg,2008(4913):171-188.
[14] Datasheet M.Crossbow Technology Inc.[Z].San Jose,California,2006.
[15] Candy J V.Bayesian Signal Processing Classical,Modern,and Particle Filtering Methods[M].John Wiley & Sons,Inc.,2008:237-289.
[16] Dellaert F,Fox D,Burgard W,et al.Monte Carlo Localization for Mobile Robots[C]//Proceedings of 1999 IEEE International Conference on Robotics and Automation,1999(3):1322-1328.
[17] Morelli C,Nicoli M,Rampa V,et al.Particle Filters for RSS-Based Localization in Wireless Sensor Networks:An Experimental Study[C]//Proceedings of 2006 IEEE International Conference on A-coustics,Speech and Signal Processing,2006(4):957-960.
[18] Kim M,Kotz D,Kim S.Extracting a Mobility Model from Real User Traces[C]//Proceedings of the 25th Annual Joint Conference of the IEEE Computer and Communications Societies,2006.
[19] Kyunghan Lee,Seongik Hong,Seong Joon Kim,et al.Slaw:A New Mobility Model for Human Walks[C]//Proceedings of 28th IEEE Conference on Computer Communications,2009:855-863.
[20] Rhee I,Shin M,Hong S,et al.On the Levy-Walk Nature of Human Mobility[J].IEEE/ACM Transactions on Network,2011(19):630-643.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
