分布式驅動的變體飛行器仿真系統設計與實現*
2012-06-13 11:32:24文哲遠陸宇平
微處理機 2012年4期
文哲遠,陸宇平
(南京航空航天大學自動化學院,南京210016)
1 引言
自20世紀初美國的萊特兄弟研制出第一架飛機試飛成功以來,飛行器的發展突飛猛進,不但有了各種各樣的外形,而且也飛得更高、更快、更靈活。即便如此,人類制造的飛行器仍然無法像鳥兒一樣根據不同的環境而靈活改變自身的飛行狀態,在空中自由翱翔。由于現代飛行器普遍采用固定的氣動布局,針對一種飛行條件而優化設計,或者是針對幾種飛行條件折衷設計,所以無法在多種飛行條件下都達到優化的氣動性能。變體飛行器作為一種全新的概念,通過改變自身的外形,能夠在不同飛行條件下執行多種飛行任務[1]。由于機翼是影響飛機性能的最重要部件,飛機的升力特性基本由機翼確定,因此對機翼的變形研究是變體飛行器的研究重點[2]。
采用分布式結構的變體飛行器結構重量輕,變形方式靈活,而且在部分驅動器發生故障的情況下也能使飛機具有足夠的可靠性,故魯棒性強[3]。要實現變體飛行器的控制,需要建立兩層控制系統。位于內層的變形控制系統用于控制變形機構,實現變形控制。位于外層的飛行控制系統,用于控制飛行器的飛行狀態,實現飛行控制[4]。
這里首先總結出分布式驅動的變體飛行器仿真系統的功能需求:①翼型控制功能,需要根據不同的飛行環境來自動選擇合適的翼型;②氣動數據存取需求,由于在線計算不同翼型在不同飛行環境下的氣動數據需要消耗不少時間,因此需要建立數據庫對氣動數據進行存儲與讀取;③主程序與MATLAB之間的通信,VC程序需要與MATLAB中的飛行控制程序同時運行,之間有大量的數據傳輸;④與底層節點之間的通信,要將上位機的指令順利發送到各個節點實現翼型控制,并能接收各節點之間的回饋數據;⑤變形翼形顯示功能,為使用者實時顯示變形效果。
根據以上要求,使用面向對象的軟件開發技術開發出一套擴展性強、易于使用的分布式驅動的變體飛行器仿真系統。重點研究了如何從軟件方面搭建分布式驅動的變形翼系統并進行變體飛行器的飛行仿真實驗。
2 變形翼總體設計
變形機構的設計需要達到兩個方面的目標,一個是翼型控制,主要影響飛機氣動參數,使飛機能夠在不同的飛行情況下始終具有優化的氣動參數;另一個是機翼后端變形控制,使機翼后緣能夠具有光滑的弧面形狀,主要用于控制飛機姿態,用以替換現在飛機上廣泛采用的舵面。
如圖1所示,用于翼型控制的變形機構由伺服電機分布式驅動的20個智能節點組成的作動器數組。作動器安裝在一塊輕質薄板(可以將其看成一根梁)上,用以模擬控制機翼翼型中段部分的變化。翼型前后兩端部分采取另一套機械機構來控制其前緣半徑和后緣夾角以及后緣光滑連續的彎曲變形。
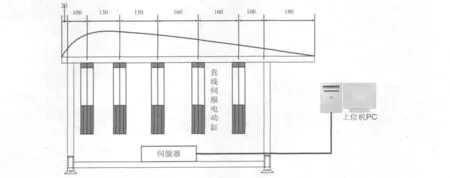
圖1 變形翼系統示意圖
智能節點之間用CAN總線連接組成網絡結構。這樣可以減少機翼中的布線,大大節省機翼內的空間,使飛機能攜帶更多燃油,并減輕了線纜重量,從而減輕了飛機的重量[5]。
飛機的翼型是由中央計算機根據傳感器回饋回來的資料計算出來的,并由底端的ARM來對單個電機進行控制,同時用協同控制算法對多個電機的協調進行控制。中央計算機在實驗情況下由PC機代替,并需要在PC機上編寫上位機程序,實現半物理仿真系統的搭建。
3 上位機系統整體框架
變體飛行器仿真平臺可分為四個部分:MFC框架、翼型控制模塊、數據庫模塊、通信模塊。
選擇MFC(微軟基礎類庫)作為上位機應用程序的基本框架。在此框架下,上位機程序包含了多個模塊的功能:對不同環境下翼型的選擇、與底層節點通信、存儲和查詢氣動數據、與MATLAB程序通信、顯示變形效果等。由于要實現飛機機翼變形的控制指令的發送以使機翼變成理想的優化形狀,上位機需要發送各智能節點的位置指令;為了使各智能節點協同變形,需要發送同步指令。同時機翼上各節點處傳感器周期性回饋給上位機的位置信息也需要在上位機上顯示出來。
在MATLAB程序中,設計人員可以通過對各種飛行控制算法的仿真來驗證變體飛行器飛行控制過程中的穩態性能和動態性能。此處由于機翼形狀的變化導致飛機氣動參數的變化,所以飛機模型設定為變參數模型。
不同飛行環境和狀態下的模型具有不同的飛機模型參數,這些參數通過離線計算存入數據庫中,并在仿真過程中從數據庫讀取出來。
作為一個平臺,需要為MATLAB程序的仿真提供飛機模型的實時氣動參數,并能將環境參數從VC程序中傳遞到MATLAB程序中。
4 上位機系統模塊設計與實現
4.1 翼型控制模塊
在飛機起飛和降落階段、跨音速飛行階段、超音速飛行階段,需要不同的翼型彎度和厚度以達到各階段的氣動特性最優化[6]。
這就需要作為飛機控制中樞的機載計算機根據當前飛行環境和飛行狀況來決定目標翼型。
在翼型控制模塊中,綜合飛機整體氣動外形,根據當前各傳感器回饋回來的飛行高度、馬赫數、迎角等飛行環境和狀態值來判定目標翼型。
由于在該仿真平臺中無法由傳感器得到當前飛行環境,故采取人工輸入環境參數值的方式對當前的飛行環境進行設置。在人機界面中設置對話框來輸入飛行環境變量,用于翼型控制模塊對目標翼型進行判定。
翼型控制模塊根據人工設置的飛行環境參數來判斷最適合該飛行環境下的目標翼型。得到目標翼型后再與飛行環境綜合,計算當前的各項氣動參數以傳遞給MATLAB的變參數模型,用于飛行控制仿真。
在氣動數據庫中存放有各翼型的幾何相對位置,翼型控制模塊根據翼型名從氣動數據庫中搜索到翼型的幾何相對位置后,轉化成物理模型部分的目標絕對位置。通過調用與底層節點之間的接口函數,實現對底層節點的控制。
在當前的氣動參數計算方法中,無論是CFD方法還是有限元分析方法都需要消耗大量的時間,然而機翼的變形過程是在較短的時間內完成的。由于當前的氣動計算方法無法滿足實時性的要求,又因為氣動參數的計算本身就存在一定的偏差,所以采用查詢方法來快速得到近似的飛機模型氣動參數。
4.2 數據庫模塊
變體飛行器的半物理仿真平臺采用關系數據庫SQL Server來實現簡易的數據庫功能。鑒于查詢時間相較于運算時間較短的優勢,最終決定選用數據庫模塊來獲得實時的近似氣動數據。
需要保存的數據有:氣動分析信息,氣動導數信息和翼型相對坐標。對數據庫的操作有:保存、修改、插入、查詢和刪除翼型氣動信息。
在SQL Server數據庫中編寫了變體飛行器仿真平臺的三張表,用于存儲不同飛行環境變量下的翼型和氣動數據,它們的關系如圖2所示。其中Aero-DeriID和AirfoilName分別為表AeroDeri和表Airfoil的主鍵,表AeroAnal(氣動分析表)具有外鍵Aero-DeriID和AerofoilID,分別引用表AeroDeri(氣動導數表)和表Airfoil(翼型表)。
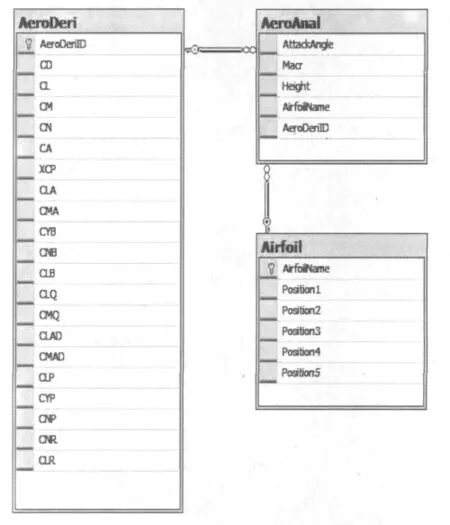
圖2 氣動數據庫關系圖
表Aerofoil中的數據相對坐標是以弦長為1的機翼剖面幾何位置數據。由于翼型庫中的幾何位置數據不一定含有所需點的位置數據,需要計算出所需點的位置數據,此處選用自然三次樣條插值算法計算出所需數據。翼型控制模塊根據飛行環境決策出實時翼型后,從該表中查詢到幾何位置參數,并將其轉化成絕對位置數據供翼型控制模塊發送給底端節點。由于所搭建的平臺中采用查詢氣動數據庫的方式得到飛行器變參數模型的各項實時氣動導數,需要先使用其它氣動導數計算軟件計算出不同飛行環境下的氣動導數。此處選用DATCOM軟件對氣動導數進行計算,并將計算好的氣動導數連同飛行環境數據一同錄入數據庫。因為在特定的飛行環境下選用特定的翼型,所以數據庫中并不需要存儲每種翼型在各種飛行環境下的氣動導數,這樣大大減少了數據庫中的條目從而減少了數據庫所占空間和查詢時間。該數據庫在使用過程中不需要經常進行插入、更新、刪除記錄操作,所以可以考慮為其創建索引。為數據庫創建復合聚集索引,可以使數據庫輸入數據時自行為輸入的數據進行排序,同時索引可以加速數據的檢索。
4.3 通信模塊
通信模塊包括平臺與MATLAB程序之間的通信和與CAN總線之間的通信兩個部分。
4.3.1 與MATLAB程序的通信
仿真系統是一個VC程序與MATLAB程序同時運行的系統,VC程序作為一個平臺,需要與MATLAB程序進行通信,為MATLAB程序中的飛機模型提供實時變化的模型參數,并將給定的環境參數實時導入MATLAB中。MATLAB程序利用環境參數和變參數模型,可以實時進行飛行仿真,得到實時飛行狀態,并能判斷變體過程中飛行器的穩定性。為此,在上位機軟件平臺中建立了兩個線程分別用于發送與接收數據,并利用臨界區來進行線程同步。平臺利用變參數模型得到的仿真結果與常值參數模型下的飛行仿真結果相比較,可以看到變體飛行器對飛機氣動性能的改善。
4.3.2 與CAN總線的通信
由于機翼上的作動器數量眾多,需要設計相關的協議與CAN之間進行通信。CAN總線之間通信的最終目標是利用CAN總線的優勢使在通信線路上的數據包盡可能的少。這就需要盡可能的利用好CAN總線數據包中的數據段使其包含多個結點的數據,使一個數據包可以為幾個智能結點所用。
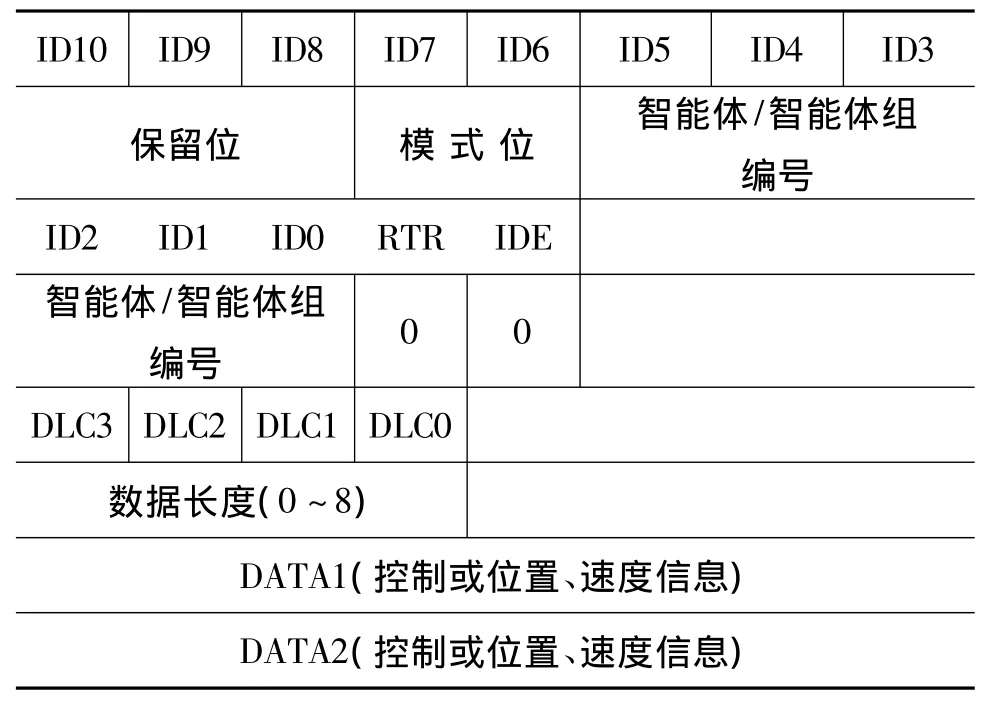
表1 CAN標準數據幀格式定義
CAN總線協議僅定義了數據鏈路層和部分物理層,需要為其構建應用層協議。CAN2.0A協議規定標準幀ID為11位,其后還包括1位遠程發送請求位RTR(置0),1位標識符擴展位 IDE(置0),4位數據長度段和數據段。
CAN報文為短幀報文,11位標準幀ID被分成了三段:高3位為保留位,接下來兩位為模式位,低6位為編號位。數據段中的DATA1和DATA2均為雙字數據類型,最多可以傳送8個字節的數據。根據模式的不同,報文中的數據段包含的數據長度也不相同。在模式00中,報文的數據段主要用于傳送上位機發送給每個智能節點的目標位置,此時需盡量包含多個節點的信息。為此將20個智能節點分為5組,每組4個節點。這樣每個節點分配2個字節的數據長度,4個節點就充分利用了短幀報文的數據段。此外,幀ID為0x00表示同步幀。在模式01中,發送的是目標位置與當前位置的差值以及電機的當前速度,為位置和速度信息各分配4個字節的數據長度。在模式10中,與模式00對應,每個節點分配2個字節的數據長度用于存儲位置信息分配4個字節用于存儲速度信息,由于發送端是智能節點,所以數據段包含6個字節的數據。在模式11中,數據段不攜帶任何數據,該模式用于在系統初始階段確定智能結點是否就緒。
5 半物理平臺運行情況
基于MFC的人機界面(如圖3所示)實現使用者與仿真平臺之間的交互,采用對話框的模式。在對話框中設置當前的飛行高度,馬赫數以及仰角等飛行環境參數和飛行狀態參數,軟件會自動選擇合適的翼型并計算各節點的位置信息,通過CAN總線發送給各節點。智能節點協同變形的同時周期性的將當前位置回饋給上位機,上位機實時顯示變形效果。同時,根據當前的翼型和飛行環境,查詢氣動數據庫獲得各項氣動參數,通過與MATLAB間的通信接口傳輸給飛行控制程序,實現變參數模型下的飛行仿真。
6 結束語
根據分布式驅動的變體飛行器仿真平臺的功能需求,搭建了為滿足需求而開發的四個重要功能模塊。在由20個智能體所組成的分布式驅動變形系統的基礎上,建立了底層硬件系統與飛行仿真軟件之間的連接,為不同的飛行控制算法提供了變形翼情況下的軟件支撐。
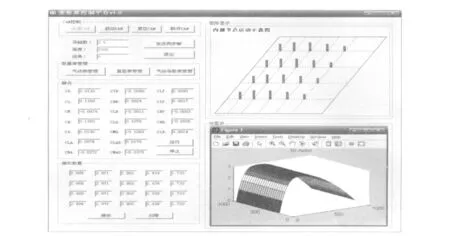
圖3 機載計算機監控接口
[1]桑為民,陳年旭.變體飛行器的研究進展及其關鍵技術[J].飛行力學,2009,27(6):5 -8.
[2]方寶瑞.飛機啟動布局設計[M].北京:航空工業出版社,1997.
[3]吳俊,陸宇平,何真.基于微系統陣列的變形翼控制研究[J].傳感器與微系統,2009,28(2):38 -41.
[4]陸宇平,何真.變體飛行器控制系統綜述[J].航空學報,2009,30(20):1 -6.
[5]陽憲惠.現場總線技術及其應用[M].北京:清華大學出版社,1999.
[6]酈正能,等.飛機部件與系統設計[M].北京:北京航空航天大學出版社,2006.
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
中華詩詞(2020年1期)2020-09-21 09:24:52
當代陜西(2019年11期)2019-06-24 03:40:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
財經(2017年2期)2017-03-10 14:35:35
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
財經(2016年15期)2016-06-03 07:38:02