中段目標高分辨距離像姿態敏感性分析
2012-06-14 01:38:02胡杰民
無線電工程 2012年7期
肇 格,胡杰民,張 軍
(國防科技大學ATR重點實驗室,湖南長沙410073)
0 引言
彈道導彈的識別技術是導彈防御系統中的關鍵問題之一[1,2]。HRRP能夠提供目標部分幾何結構信息,且獲取條件簡單,在導彈目標分類與識別中有著重要的應用。HRRP應用中的關鍵問題在于其姿態敏感性[3-7],目前關于導彈目標 HRRP姿態敏感性的針對性研究較少[8]。下面基于某暗室實測的步進頻回波數據,從任2幅HRRP的相似度、未發生散射點遷出和移入(MTRC)下HRRP的穩定性以及平均相似度隨姿態間隔的變化3個方面定量分析導彈目標高分辨距離像(HRRP)的姿態敏感性。針對未發生散射點MTRC下部分HRRP波形突變的原因展開深入分析,首先基于ISAR像提取導彈目標的二維散射中心分布,然后具體分析各姿態下散射中心在距離分辨單元內的分布情況,計算HRRP突變時各散射中心之間的相位關系,并結合HRRP的數學模型,解析突變現象的產生原因。
1 導彈目標HRRP的姿態敏感性
導彈包括彈頭和彈體2部分,結構比較簡單,由錐體、柱體和球體等常見散射部件構成。通常來說,在目標的頭部、尾部及部件接連部位分別存在幾個強散射中心。隨著雷達視線的變化,各散射中心在雷達視線上的投影會發生變化,導致其合成的HRRP隨姿態變化,這就是HRRP的姿態敏感性。
HRRP的姿態敏感性與各姿態下散射中心等效模型有關[9],本文只分析散射中心等效模型未發生變化的姿態內HRRP的姿態敏感性。在這一姿態范圍內,HRRP的姿態敏感性有以下2個原因:①散射中心在各距離分辨單元間的MTRC會改變各距離分辨單元的回波強度;②即使散射中心沒有發生MTRC,由于寬帶回波是距離分辨單元上各散射中心子回波的相干合成,因此姿態的微小變化也會改變散射中心之間的相位關系,導致相干合成回波的幅度迅速變化。
目標的相似度是分析HRRP姿態敏感性的有效工具[10],定義如下:
式中,代表姿態為 φ1,φ2的2幅HRRP;C()定義了2幅HRRP之間的相似程度。下面將從任意2幅HRRP的相似度未發生散射點MTRC下HRRP的穩定性以及平均相似度隨姿態間隔的變化3個方面全面分析導彈目標HRRP的姿態敏感性。
2 任意2幅HRRP的相似度分析
HRRP是由各距離分辨單元回波構成的高維矢量,而各距離分辨單元回波是其上散射中心的相干合成,隨姿態的變化規律是復雜的[10],因此,HRRP隨姿態的變化更加復雜。下面通過0~10°姿態下任意2幅HRRP的相似度來宏觀觀察HRRP隨姿態的變化。0~10°姿態下任意2幅HRRP的相似度如圖1所示。從圖中可見:
①總體上來看,姿態變化越大,HRRP相似度越低;
②一般情況下,在不發生散射點MTRC的最小姿態 Δ φmin-MTRC內(Δ φmin-MTRC==1.8°,ΔR,Lmax分別代表雷達的距離分辨率及目標的最大橫向尺寸[11]),HRRP 的相似度很高;
③某些情況下,即使沒有發生散射點MTRC,HRRP也會突變,相似度突然下降,但是持續一兩次回波后,又恢復正常(圖1標注處)。
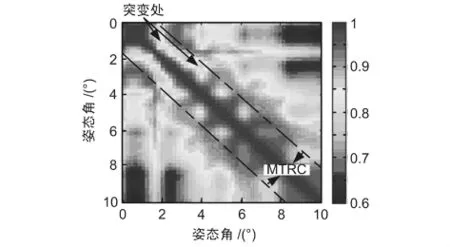
圖1 0~10°姿態下任意2幅HRRP相似度
以0°姿態為例:由目標模型可知,0°時導彈尾部頂端的2個散射中心在雷達視線上投影的距離差為0,處于同一距離分辨單元;姿態變化4.2°后,這樣的一對散射中心在雷達視線上投影的距離差,也就是說發生了散射點MTRC,因此姿態角大于4.2°的HRRP與0°時HRRP相似度很低(由圖1可見,相似度低于0.85)。然而,姿態角0°~4.2°內,相似度也會出現較低的情況(如 θ=1.4°,1.8°,3.2°,4°)。圖2 繪出了 θ=1.8°,4°時的 HRRP,由圖 2 可見:與 0°時HRRP相比,此時HRRP中的部分尖峰發生了突變。
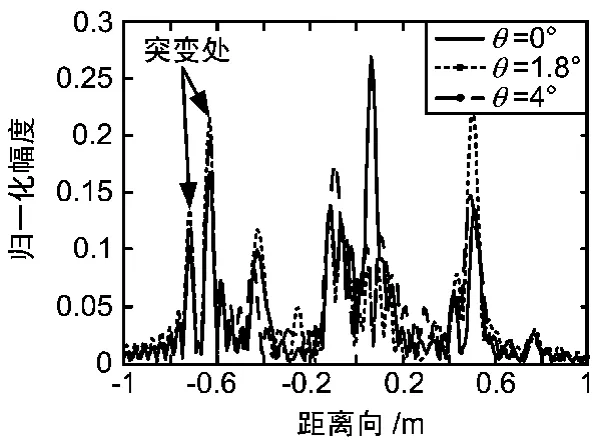
圖2 θ =1.8°,4°時的突變 HRRP
另外,從圖1中也可看出:一般情況下,鄰近數個姿態的HRRP是很相似的,且相似度隨姿態的下降很緩慢;但是在發生突變的姿態處,鄰近姿態的HRRP相似度迅速下降。
3 未發生散射點MTRC下HRRP的穩定性
平均HRRP是對沒有發生散射點MTRC的一組不同姿態的HRRP平均處理產生的,是常見的克服HRRP姿態敏感性的方法,廣泛應用于HRRP模板庫的建立中。因此下面針對導彈目標的暗室測量數據,分析未發生散射點MTRC下各HRRP與平均HRRP的相似度,平均范圍的選擇依據Δ φmin-MTRC。對0~10°姿態的HRRP依據Δ φmin-MTRC劃分而形成的平均HRRP如圖3所示。各HRRP與相應平均HRRP的相似度如圖4所示。
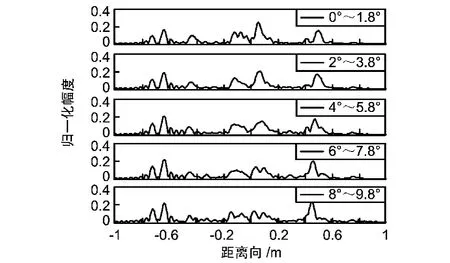
圖3 依據Δ φmin-MTRC劃分形成的平均HRRP
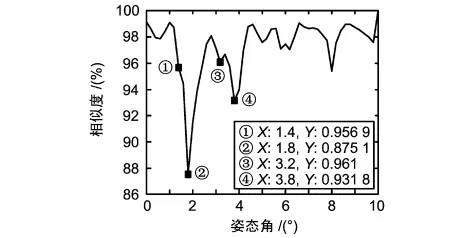
圖4 各HRRP與平均HRRP的相似度
由圖3可見,不同的姿態范圍內(也稱為方位幀),平均HRRP會有輕微的變化。從圖4可以看出:在不發生散射點MTRC的姿態范圍內,大多數姿態下的HRRP與平均HRRP的相似度很高,在96%左右,這表明平均HRRP能夠很好地逼近或代表這些姿態下的HRRP,是有效的目標HRRP模板;但是對于有些姿態下(θ=1.8°,4°)的 HRRP,其與平均HRRP的相似性并不是很高,因此平均HRRP不能很好的代表這些姿態的HRRP。
4 平均相似度隨姿態間隔的變化
上述分析了任意2幅HRRP的相似度,從整體上觀察了HRRP隨姿態的變化。2幅HRRP的相似度不僅僅依賴于它們的姿態間隔,也與它們的具體姿態有關。然而,目標識別時關注的是全姿態下的平均識別性能,也就是平均相似度,定義如下[3]:

因此下面將分析平均相似度隨姿態間隔的變化。具體到暗室數據,式(2)可近似由所有姿態差為Δφ的2幅HRRP相似度的平均計算得到,結果如圖5所示。
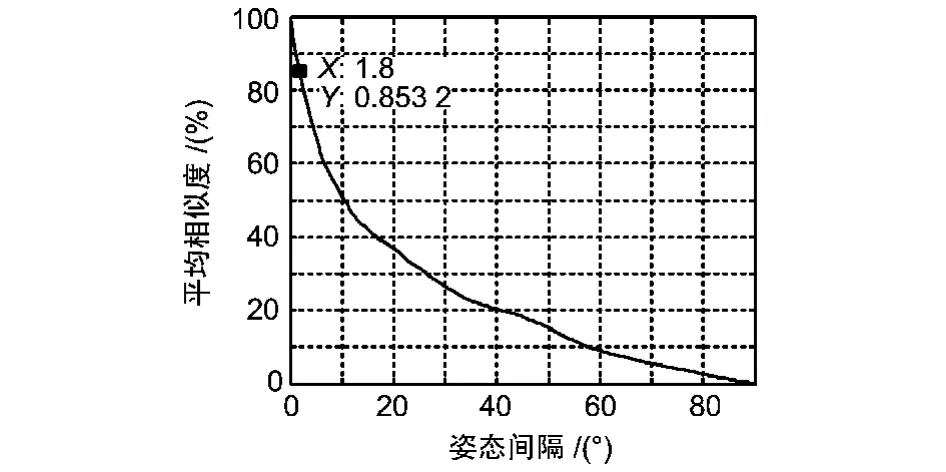
圖5 0~90°內的HRRP平均相似度
由圖5可知,隨著姿態間隔的增大,平均相似度迅速下降。當姿態間隔增大到Δ φmin-MTRC時,平均相似度已下降到85%左右。這表明即使沒有發生散射點MTRC,HRRP波形也會隨姿態發生明顯變化。顯然,這是由于距離分辨單元內散射中心之間的相干疊加造成的。
由上述分析可以看出,距離分辨單元內散射中心之間的相干疊加會造成某些姿態下的HRRP突變,這種突變影響了傳統依據MTRC劃分的各方位角域內HRRP的穩定性及平均HRRP作為模板的性能。
5 結束語
距離分辨單元內散射點之間的干涉導致HRRP嚴重的姿態敏感。上述基于某暗室實測的步進頻回波數據,從任意2幅HRRP的相似度、平均相似度隨姿態間隔的變化以及未發生散射點MTRC下HRRP的穩定性3個方面定量分析HRRP的姿態敏感性,結論表明:距離分辨單元內散射中心之間的相干疊加會造成某些姿態下的HRRP突變,這種突變影響了傳統依據MTRC劃分的各方位角域內HRRP的穩定性及平均HRRP作為模板的性能。
[1]金光虎.中段彈道目標ISAR成像及物理特性反演技術研究[D].國防科學技術大學,2009:26-27.
[2]周小坤.美導彈防御局演示驗證導彈定時預警攔截能力[J].裝備指揮技術學院學報,2011,22(5):67-67.
[3]HUDSON S,PSALTIS D.Correlation Filters for Aircraft I-dentification from Radar Range Profiles[J].IEEE T Aero Elec Sys,1993,29(3):741 -748.
[4]ZYWECKA,BOGNER R E.Radar Target Classification of Commercial Aircraft[J].IEEE T Aero Elec Sys,1996,32(2):598-606.
[5]JACOBSS P.Automatic Target Recognition Using High-resolution Radar Range Profiles[C].Dissertation of Doctoral Degree.Washington:Washington University,1999:35 -83.
[6]LIAO X J,BAO Z,XING M D.On the Aspect Sensitivity of High Resolution Range Profiles and its Reduction Methods[C].Conf Alexandria,VA,2000:310 -315.
[7]XINGM D,BAO Z,PEI B N.Properties of High-resolution Range Profiles[J].Opt Eng,2002,41(2):493 -504.
[8]徐海麗,王 澤.冪變換在一維距離像目標識別中的作用分析[J].現代雷達,2011,33(9):37 -41.
[9]劉宏偉,馬建華,保 錚.BOX-COX變換提高雷達高分辨距離像識別性能的物理機理分析[C].第九屆全國雷達學術年會論文集,2004:354-357.
[10]LIHsueh-Jyh,WANG Yung-Deh,WANG Long-Huai.Matching Score Properties between Range Profiles of High Resolution Radar Targets[J].IEEE T.Antenn.Propag.,1996,44(4):444 -452.
[11]保 錚,刑孟道,王 彤.雷達成像技術[M].北京:電子工業出版社,2006.
