風洞模型位移視頻測量的相機標定
2012-06-15 01:27:52王愛玲張征宇黃詩捷王水亮
實驗流體力學 2012年5期
王愛玲,張征宇,黃詩捷,王水亮,趙 濤
(1.中國空氣動力研究與發展中心 空氣動力學國家重點實驗室,四川 綿陽 621000;2.西南科技大學 信息工程學院,四川 綿陽 621010)
風洞模型位移視頻測量的相機標定
王愛玲1,張征宇1,黃詩捷2,王水亮2,趙 濤2
(1.中國空氣動力研究與發展中心 空氣動力學國家重點實驗室,四川 綿陽 621000;2.西南科技大學 信息工程學院,四川 綿陽 621010)
相機的制造和裝配誤差難以完全消除,導致相機的光學系統存在不同程度的非線性光學畸變現象,故相機標定對確保風洞模型位移視頻測量的精度至關重要。針對1m2以上的臺階標定塊制造成本高、維護困難,提出基于距離標尺的相機標定方法,推導包含非線性畸變模型的共線方程,建立適應中國大尺寸風洞的低成本相機標定系統,確保模型位移視頻測量相機的自校正精度。2m超聲速風洞的某跨大氣層飛機測力試驗中,采用該方法校正DALSAR○相機后,各階梯迎角測量精度σα≤0.00772°(達到高速風洞測力試驗迎角精度的先進指標),因此具有實用價值。
模型位移測量;風洞試驗;相機標定;測量精度;誤差分析;視覺測量
0 引 言
隨著大尺寸跨聲速、超聲速風洞的逐步應用,將試驗模型視為剛性體的假設不再成立,亟需獲取模型位移、姿態角、變形等測量數據,以修正試驗數據以提高試驗數據精度[1-6]。
模型位移視頻測量作為一種“非接觸式”測量技術受到國內外風洞工作者的關注。國外在這方面進行了深入研究,技術成熟,如美國從20世紀80年代開始研究該項技術,通過精確測量粘印在模型上的標識點,計算出扭轉、彎曲和迎角,現已應用于各種低速、高速、超高速風洞模型的運動軌跡、變形和姿態角的測量[1-6]。在國內,空氣動力學國家重點實驗室已率先建立模型位移視頻測量的相機位姿確定技術,并在中國空氣動力研究與發展中心高速所2.4m跨聲速風洞成功開展了模型位移視頻測量實驗[7]。
鑒于相機的光學系統并非嚴格按照針孔攝像機模型工作,存在鏡頭畸變,影響模型位移視頻測量精度,尤其是對于大景深視頻檢測(指清晰成像時待測物在物方空間前后檢測范圍大),鏡頭畸變對待測物的高程檢測精度影響極大[1-12]。因此,通過相機標定,恢復攝影中心、模型上待測點及其像點間的正確幾何關系,對于確保模型位移視頻測量精度至關重要。
目前,國外采用高精度的臺階標定塊進行相機標定[1-6]。圖1為美國國家航空航天局(NASA)采用的標定塊,其標定方法包含了確定相機位置與姿態的最小二乘法和確定相機畸變與焦距等參數的最優化方法[6],不足之處在于:制造與維護成本高(尤其是臺階標定板尺寸超過1m后,其制造與維護費用劇增至十幾萬到幾十萬),因為這類臺階標定板要求其上標志點的坐標都要非常精確,并需要恒溫恒濕存放環境[11]。
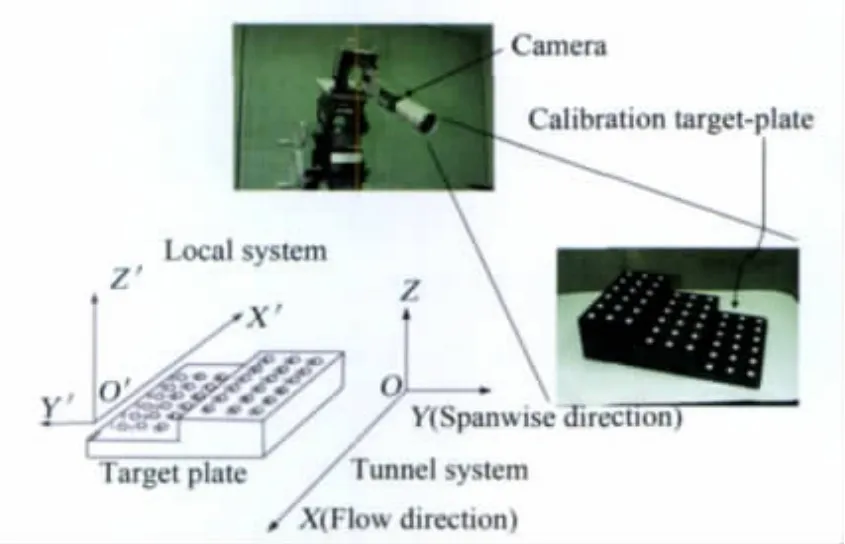
圖1 美國國家航空航天局(NASA)采用的標定塊Fig.1 Step calibration object used by NASA
為此,提出基于距離標尺的相機標定方法,以建立適應我國大尺寸風洞的低成本相機標定系統。
1 基于距離標尺的相機標定
1.1 原理
共線方程描述了相機、模型上待測點及其像點3者的數學模型,考慮鏡頭畸變后其表達式如下:

式中:(x0,y0)分別為相機像平面中心,f為相機焦距,(Xs,Ys,Zs)分別為相機在地面坐標系下的位置坐標,(a1,a2,a3,b1,b2,b3,c1,c2,c3)為相機姿態角(φ,w,k)所組成的旋轉矩陣R中9個方向余弦,(x,y)與(X,Y,Z)分別為模型上粘印待測點的像平面坐標與地面坐標系下的坐標。
式(2)同時考慮了徑向畸變、偏心畸變和薄棱鏡畸變,具體計算公式如下:
因此,利用光束平差法[9-10]求解式(1),即可通過多幅檢測圖像解得6個鏡頭畸變參數k1、k2、p1、p2、s1和s2。其中,光束平差法是一種把已知點的像點坐標、待測點的像點坐標以及畸變參數、相機位姿數據的一部分或全部均視作觀測值,同時求解的解算方法[9-10]。
1.2 標定方案設計
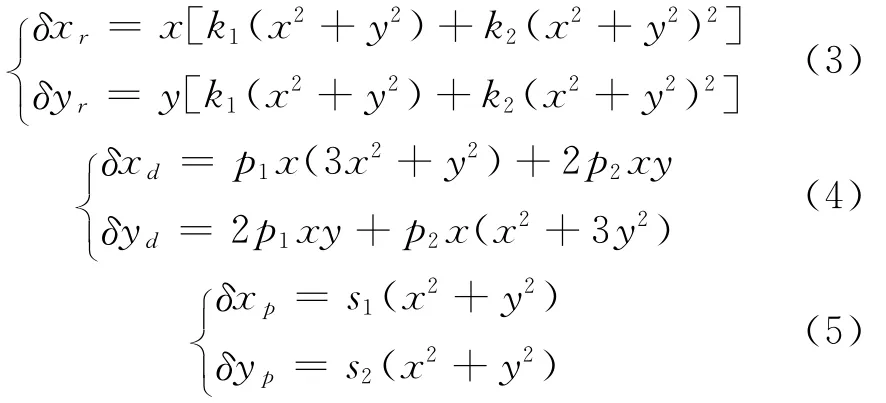
標定系統采用如圖2所示的標尺,標尺上的編碼點采用高精度的測量設備(如3坐標測量機)測量出各個編碼點間的距離參數,因此加工、使用和維護都很方便。
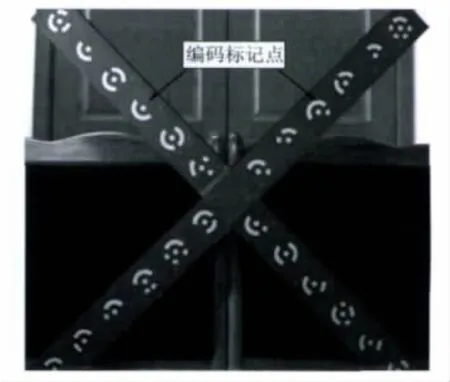
圖2 相機標定采用的標尺Fig.2 Calibration rule
具體的相機標定方法如下:
(1)圍繞圖2標尺從多個角度拍攝一組圖像序列,確保標尺編碼點在相機CCD上的成像坐標不同,并盡量使圖像序列中標尺編碼點在相機CCD各個方位都有成像;另外,要求標尺成像清晰、亮度與對比度好;
(2)對選取的圖像進行編碼點識別,并得到編碼點中心的圖像坐標;
(3)將編碼點距離作為約束方程,畸變參數和相機位姿參數作為待求解量,編碼點三維坐標作為初值,利用光束平差法聯解式(1)與編碼點間的距離方程,得到6個鏡頭畸變參數k1、k2、p1、p2、s1和s2。
2 相機標定實驗
2.1 實驗設備及方案
采用Microsoft Visual Studio 2005的C#語言開發了相機標定軟件。標定系統采用的具體硬件如下:DALSAR○的相機(分辨率為400萬像素,成像幅面為17.4mm×12.8mm)、圖像采集電腦、35mm 定焦鏡頭和標尺。在中國空氣動力研究與發展中心的2.4m跨聲速風洞試驗段,通過旋轉與小幅移動相機,從不同視角以標尺為目標采集了36幅圖像,從中選取32幅成像清晰、亮度與對比度好的圖像,圖3(a)和(b)分別為開發的相機標定軟件處理第1幅與第2幅圖像的界面,圖中綠色數字為編碼點編號,紅色數字為選中的標尺上編碼點編號。
分別從選取的15幅圖像中分別選定2、4、6、8、12、16、24、28與32幅計算出的6個鏡頭畸變參數如表1所示,隨采集照片數量的變化趨勢如圖4所示。
圖3 相機標定軟件的圖像處理界面Fig.3 Interface of calibration soft for image recognition
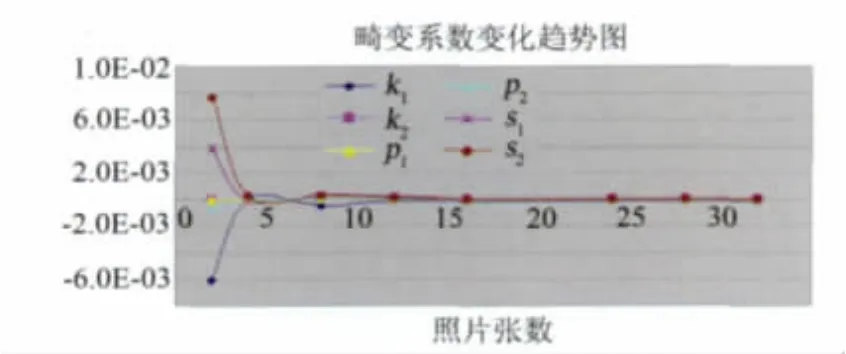
圖4 DALSAR○的相機畸變系數變化趨勢圖Fig.4 Tendency of distortion coefficients with the number of pictures
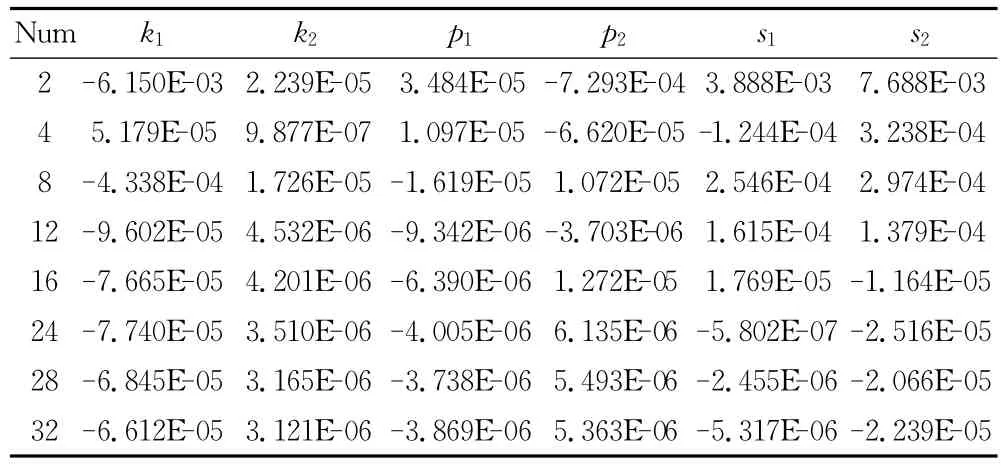
表1 DALSAR○相機畸變系數變化趨勢Table 1 Tendency of distortion coefficients
2.2 數據分析
從表1中數據和圖4可知:當選定的圖像超過12幅后,解出的6個鏡頭畸變參數逐漸穩定。當選定2幅圖像時解出的畸變參數較大,原因在于參與計算畸變參數的編碼點總數量為48,并且在CCD上成像位置分布尚不均勻,導致光束平差法解得的畸變參數未真實反映相機的畸變現象,使用該畸變參數將使某些位置的像素點的改正量極小,而其它位置的改變量較大,引起畸變參數失真現象;當選定圖像數量從4增加到12,參與計算畸變參數的編碼點總數量從96增至288個,由于采集的照片視角不同,標尺上編碼點與洞體上編碼點的成像坐標一般不同,其成像位置在CCD上各個方位都開始有分布,因此計算出的鏡頭畸變參數值迅速減小,開始收斂;當選定圖像數量從16增加到32,參與計算畸變參數的編碼點總數量從384增至768個,其成像位置在CCD各個方位基本都有分布,因此,計算出畸變參數值已經收斂,變化極小,即此時再增加參與計算畸變參數的編碼點數量,對于提高畸變參數解算精度效果不明顯。
可見,當從不同角度圍繞標尺拍攝的圖像序列數量超過28以后,參與計算畸變參數的編碼點總數量達到672個,即當參加標定的編碼點在相機CCD各個方位都有成像,這里提出的相機標定方法可以得到正確的鏡頭畸變模型。采用表1中Num為28時的畸變參數代入式(2),校正用DALSAR○相機在2.4m跨聲速風洞中某無人機試驗時采集的試驗圖像中試驗段底部的編碼標記點的像素坐標,再采用模型變形視頻測量的相機位置坐標與姿態角確定技術[13],通過式(1)得到試驗段底部的編碼標記點的三維坐標如表2所示,表中采用的相對誤差計算式為:

式中:ε為相對誤差,Δlmax為像點殘差(像點真實值與計算值之差)的最大值,R為相機成像幅面的對角線長度。與未作校正的結果(如表3所示)比較,解算的試驗段底部的編碼標記點的像點殘差均有所下降,其中47號點像點殘差從1.350E-03降至1.5575E-04。
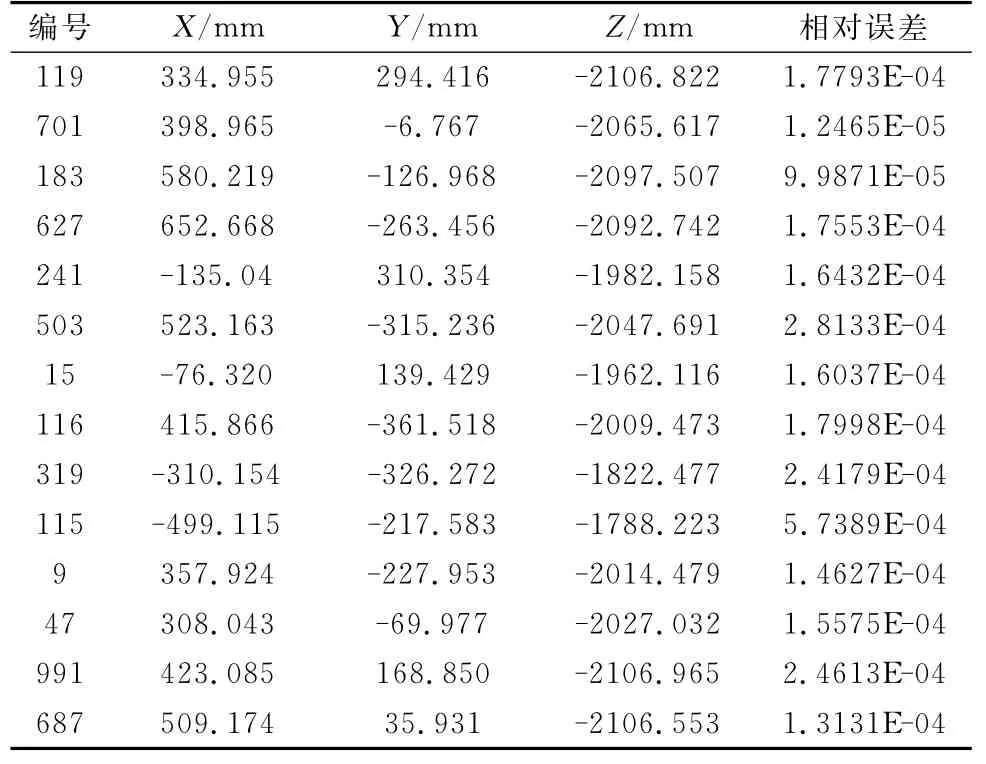
表2 相機解算數據(校正)Table 2 3Ddata with camera correction
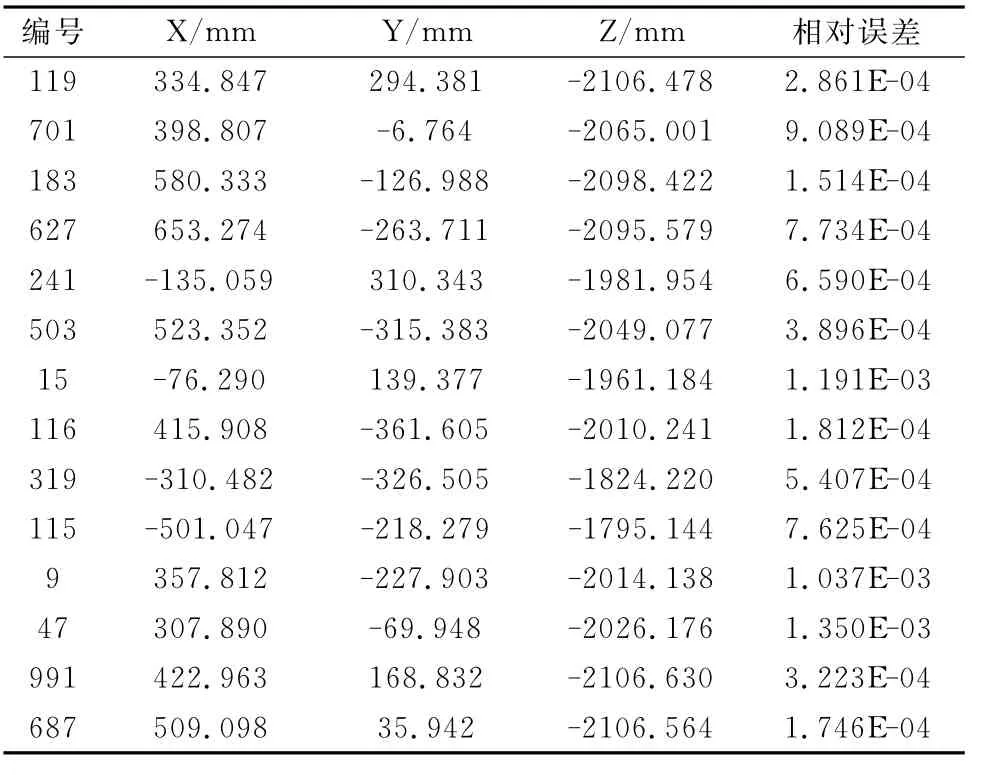
表3 相機解算數據(不校正)Table 3 3Ddata without camera correction
3 在模型姿態角視頻測量中的應用
在中國空氣動力研究與發展中心高速所的2m超聲速風洞中,采用本方法校正DALSAR○相機的光學畸變,以提高風洞模型上標記點三維坐標測量精度,從而確保模型姿態角的測量精度。如圖5所示,某跨大氣層飛機在氣動力作用下的迎角視頻測量數據,表4為連續測量10次時,各階梯迎角測量估計值的標準差,其中最大值為0.002442°,各階梯迎角測量數據的最大標準差為0.00772°,表明采用本方法標定相機后,模型姿態角視頻測量系統的迎角精度σα≤0.00772°,迎角精度達到高速風洞測力試驗的先進指標[14]。
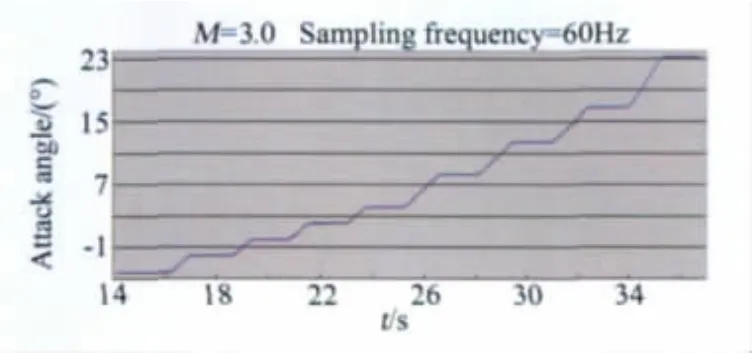
圖5 某跨大氣層飛機模型的迎角視頻測量Fig.5 Videogrammetric angles of attack for an orbiter model
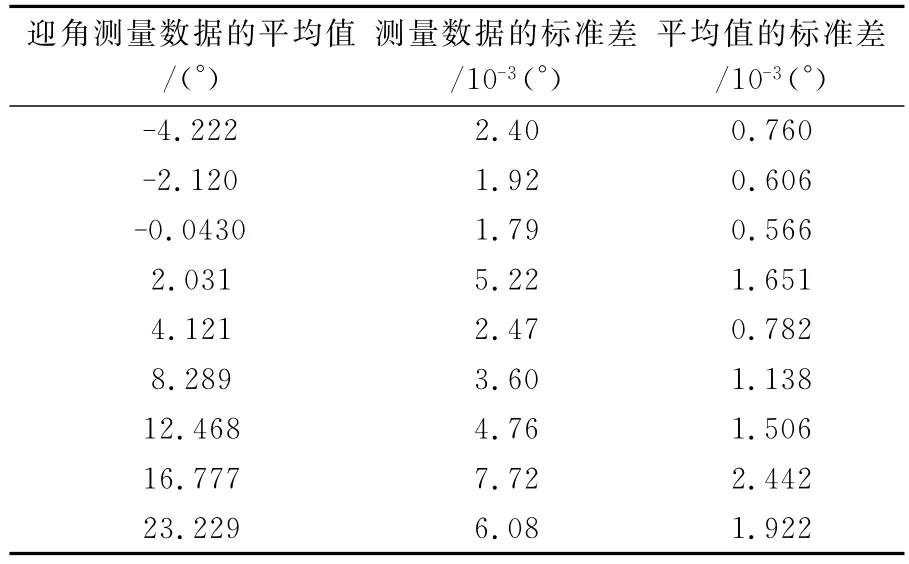
表4 某跨大氣層飛機模型迎角視頻數據的不確定度Table 4 Uncertainty of angles of attack for an orbiter model
4 結 論
針對面積在1m2以上的臺階標定塊制造成本高、維護困難,提出基于距離標尺的相機標定方法,建立適應我國大尺寸風洞的低成本相機標定系統,DALSAR○相機(35mm定焦鏡頭)的標定實驗表明本方法正確;在2m超聲速風洞某跨大氣層飛機測力試驗中,采用本方法校正DALSAR○相機后,各階梯迎角精度σα≤0.00772°,迎角精度達到高速風洞測力試驗的先進指標,因此具有實用價值。
[1]LE SANT Y,MIGNOSI A,DELéGLISE B.Model deformation measurement(MDM)at Onera[R].AIAA 2007-3817.
[2]LIU T,BURNER A W,PAPPA R.Photogrammetric techniques for aerospace applications[R].AIAA 2008.
[3]DANNY A BARROWS.Videogrammetric model deformation measurement technique for wind tunnel applications[R].AIAA 2007-1163.
[4]LE SANT Y,MERIENNE M C,LYONNET M,et al.A model deformation measurement method and its application on PSP measurements[R].AIAA 2004-2192.
[5]BURNER A W,WILLIAM A.Aeroelastic deformation:adaptation of wind tunnel measurement concepts to fullscale vehicle flight testing[R].RTO-MP-AVT-124.
[6]周述光,溫渝昌,金啟剛,等.風洞模型位移光學測量技術應用綜述[J].實驗流體力學,2009,23(2):94-99.
[7]AHMED M.Nonmetric calibration of camera lens distortion:Differential methods and robust estimation[J].IEEE Transactions,2005,14(8):1215-1230.
[8]ZHANG Z.A flexible new technique for camera calibration pattern analysis and machine intelligence[J].IEEE Transactions,2002,11(22):1330-1334.
[9]馮文灝.近景攝影測量-物體外形與運動狀態的攝影法測定[M].武漢:武漢大學出版社,2002.
[10]黃桂平,葉聲華,李廣云.數字近景工業攝影測量關鍵技術研究與應用[D].天津大學,2005.
[11]徐立艷.攝像機標定多視點校正算法[D].山東大學,2008.
[12]張征宇,黃詩捷,羅川,等.基于共面條件的攝像機非線性畸變自校正[J].光學學報,2012,32(1):1-6.
[13]羅川,張征宇,孫巖.模型變形視頻測量的相機位置坐標與姿態角確定[J].實驗流體力學,2010,24(6):94-99.
[14]惲起麟.實驗空氣動力學[M].北京:國防工業出版社,1991:190-193.

王愛玲(1972-),女,河北故城人,碩士。研究方向:幾何量測量、非接觸測量。通訊地址:四川綿陽中國空氣動力學研究與發展中心(621000),E-mail:wangai_ling@yeah.net
Camera calibration of model displacement videogrammetric measurement in wind tunnel
WANG Ai-ling1,ZHANG Zheng-yu1,HUANG Shi-jie2,WANG Shui-liang2,ZHAO Tao2
(1.State Key Laboratory of Aerodynamics,China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China;2.Information Engineering College,Southwest U-niversity of Science and Technology,Mianyang Sichuan 621010,China)
Camera calibration is crucial for the measure precision of model displacement in wind tunnel test,because the fabricating and assembling errors of the camera optical system cannot be removed which results in nonlinear distortion between real image and ideal image to some extent.When the area of calibration target-plate is more than 1m2,its cost of fabrication and maintenance is very high,therefore,a camera calibration method based on known distance ruler is introduced.Collinear equations with nonlinear distortion coefficients are deduced to ensure selfcalibrating accuracy,and the low-cost calibration system is constructed.The videogrammetric angles of attack for an orbiter model in 2msupersonic wind tunnel test,which uses this method to calibrate two DALSA○Rcameras,have demonstratedσα≤0.00772°(reach the advanced precision of attack angle for high speed wind tunnel),therefore it is useful and effective.
model displacement measurement;wind tunnel test;camera calibration;measurement accuracy;error analysis;videogrammetry
O432.2
A
1672-9897(2012)05-0074-05
2011-04-11;
2012-05-15
四川省科技創新苗子工程;國家自然科學基金(51075385)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
