2m×2m超聲速風洞流場控制策略研究與實現
2012-06-15 01:27:58褚衛華湯更生
實驗流體力學 2012年5期
褚衛華,湯更生,王 帆
(中國空氣動力研究與發展中心,四川 綿陽 621000)
2m×2m超聲速風洞流場控制策略研究與實現
褚衛華,湯更生,王 帆
(中國空氣動力研究與發展中心,四川 綿陽 621000)
2m×2m超聲速風洞是一座大型引射下吹式風洞,總壓控制具有非線性、時變、大滯后特性,引射器和主調壓閥同時運行時存在一定的耦合特性。為了滿足風洞試驗對總壓控制精度和收斂速度的要求,對不同馬赫數試驗條件下,風洞流場啟動和串級智能穩定控制策略進行了深入研究,并在調試過程中對控制方法進行了驗證,控制結果達到風洞指標要求。
串級控制;風洞;流場;總壓;控制策略
0 引 言
2m×2m下吹引射式超聲速風洞由氣源、進氣管路、穩定段、收縮段、噴管段、試驗段、補償段、超聲速擴散段、擴散段、引射器、亞聲速擴散段、消聲段和驅動裝置構成,氣動布局如圖1。風洞運行方式是:吹風前通過預置撓性噴管各執行機構位置形成與理論氣動型面相吻合的撓性板彎曲形狀,在試驗過程中通過主調壓閥控制穩定段總壓。在某些試驗工況下需要啟動引射器,通過引射調壓閥控制引射器集氣室總壓來降低背壓,從而減小啟動壓力或降壓運行,實現風洞高馬赫數和降速壓運行。
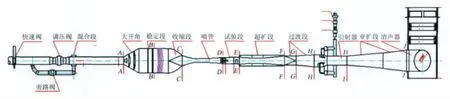
圖1 下吹式超聲速風洞氣動布局圖Fig.1 The aerodynamic configuration of the down-blowing supersonic wind tunnel
2m×2m超聲速風洞控制存在以下特點:
(1)風洞穩定段容積較大,主調壓閥與總壓控制反饋檢測點之間距離較遠,總壓控制存在較大的滯后性;
(2)在高馬赫數試驗工況下,撓性噴管型面喉道很窄,風洞啟動壓力與工作壓力差值較大,很大的穩定段容積導致產生風洞快速啟動和流場快速穩定矛盾;
(3)在引射啟動方式下,主調壓閥與引射調壓閥同時工作,主調壓閥與引射調壓閥控制部分相互干擾,產生耦合;
(4)風洞試驗馬赫數范圍較寬,引射器與主調壓閥運行組合方式多樣,啟動方式與運行控制復雜。
1 風洞控制系統
1.1 風洞控制系統組成與控制要求
在風洞試驗過程中,2m×2m超聲速風洞流場建立和控制主要通過總壓控制和引射器集氣室壓力控制來實現。總壓控制部分主要由主調壓閥、旁路閥和穩定段總壓、主調壓閥后壓力、氣源壓力傳感器構成,主調壓閥采用液壓伺服油缸驅動,控制原理是選用高精度壓力傳感器采集穩定段總壓,控制器采用智能PID控制算法產生控制信號,控制電液伺服油缸推動主調壓閥芯運動速度和位置完成總壓調節。引射壓力控制部分主要由引射調壓閥、集氣室壓力、引射氣源壓力傳感器構成。引射器調壓閥同樣采用液壓驅動,將集氣室壓力作為反饋信號,經引射壓力控制器產生引射器調壓閥速度和位置控制信號,控制原理與總壓控制相同。
在風洞試驗過程中,除正常關車方式外,為了消除關車氣流對穩定段燒結絲網造成的沖擊,引入了引射關車方式。
風洞試驗對流場的控制要求是:穩定段總壓p0控制精度為0.2%F.S;Ma數為:1.5~4.0;穩定段工作總壓范圍:1.0×105~12.0×105Pa;所要求的試驗工況為:定壓階梯變迎角;定迎角階梯變總壓。
1.2 控制系統硬件環境
風洞控制為集散控制系統,其構成框圖如圖2。風洞穩定段總壓控制、引射器集氣室壓力控制是風洞流場參數控制的核心,不僅要求控制計算機可靠、快速、具有較強的模擬量和浮點數處理能力,而且還要求控制計算機實時處理能力很強。因此,核心控制部分選用了美國NI公司生產的RT系列PXI嵌入式控制器,并選用與之配套的RT實時操作系統。為了保證控制精度,穩定段總壓選用了0.05%F.S高精度的壓力傳感器,集氣室壓力傳感器精度是0.1%F.S。為了減少系統干擾,壓力傳感器輸出方式為大電流信號,經隔離濾波后上送控制計算機。
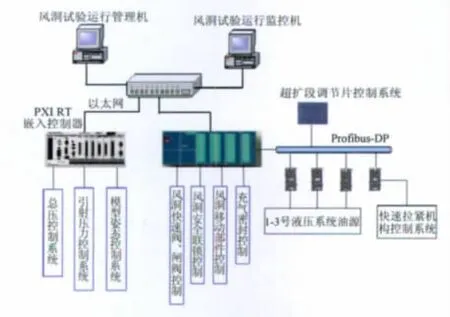
圖2 下吹式風洞控制系統組成框圖Fig.2 The control system of the down-blowing supersonic wind tunnel
2 風洞控制策略
根據超聲速風洞試驗過程中主調壓閥部分與引射器調壓部分工作配合方式,風洞運行分為下吹式、引射式和引射下吹式3種類型。在下吹式運行方式中,風洞啟動和流場控制由主調壓閥單獨完成;在引射式運行方式中,引射器調壓部分和主調壓閥部分同時工作,完成風洞降速壓試驗;在引射下吹式運行方式中,引射器輔助主調壓閥部分完成風洞啟動后關閉,目的是降低風洞流場建立的啟動壓力,然后由主調壓閥控制部分單獨完成穩定段總壓控制。為實現風洞快速啟動,并在啟動后很快完成滿足精度要求的目標工作壓力調節,在試驗過程中,3種運行方式都采用了 “快速啟動+智能控制”的策略。為了提高試驗效率和控制精度,不同的風洞運行類型采用了不同的啟動方式。但流場建立后,風洞各運行方式總壓智能控制策略基本相同。
2.1 風洞快速啟動控制
風洞啟動控制部分是由氣源壓力傳感器、穩定段總壓傳感器、引射器壓力傳感器和主調壓閥位置傳感器、引射器位置傳感器以及核心控制器構成的閉環控制系統,具體控制構成見圖3。
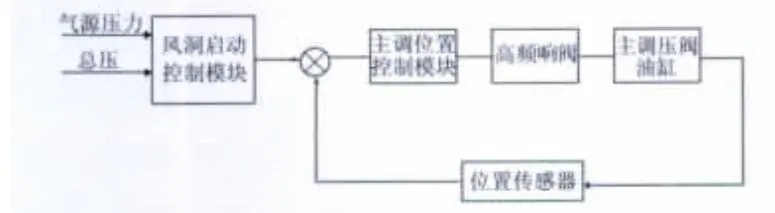
圖3 風洞啟動控制框圖Fig.3 The flow chart of wind tunnel start-up control
在下吹式試驗方式中,風洞啟動過程是:在保證風洞安全運行的前提下,控制主調壓閥迅速打開到盡可能大的位置,快速完成穩定段和風洞管路填充,當穩定段總壓達到目標啟動壓力后,風洞流場建立,正激波從噴管段推到超擴段后平直段,這時核心控制器根據當前氣源壓力和主調壓閥閥門特性曲線計算出目標工作壓力對應主調壓閥位置預開度,并將主調壓閥迅速定位到相應位置,控制穩定段總壓很快下降到目標工作壓力。在總壓調節過程中壓力不能偏離目標工作壓力太遠,以防激波返回試驗段,導致模型天平損壞。在不同試驗馬赫數區間中,撓性噴管喉道的尺寸差別很大,因此風洞啟動控制流程會隨目標馬赫數智能改變。當試驗目標馬赫數較低(M=1.5~2.25)時,噴管段喉道尺寸較大,試驗開始后,主調壓閥在核心控制器控制下快速開到啟動安全開度位置(遠遠大于當前氣源壓力下工作壓力對應的主調壓閥目標開度),迅速完成穩定段和風洞管路填充工作,穩定段總壓達到目標啟動壓力后,控制模塊檢測當前氣源壓力,根據目標壓比和閥門特性曲線,計算出目標工作壓力主調壓閥目標開度,然后控制主調壓閥開度到目標位置,等待1s后,穩定段壓力穩定,穩定段總壓迅速下降到工作壓力附近,系統開始進入工作壓力閉環調節階段;當試驗目標馬赫數較大(M=2.5~4.0)時,噴管段喉道尺寸較小,啟動壓力也遠遠大于風洞運行工作壓力,采用相同的啟動方式,會導致從啟動壓力返回到目標壓力時間很長,從而降低試驗效率,因此在穩定段總壓達到啟動壓力后,增加了穩定段快速降壓處理過程,具體試驗流程是:主調壓閥在核心控制器控制下快速開到啟動安全開度位置,迅速完成穩定段和管路填充工作,當穩定段總壓達到目標啟動壓力后,迅速將主調壓閥閥門關閉到很小位置,實現穩定段迅速降壓,當總壓到達目標工作壓力附近后,啟動控制模塊檢測當前氣源壓力,根據目標壓比和閥門特性曲線,計算工作壓力主調壓閥目標開度,然后控制主調壓閥到目標位置,等待1s后,穩定段壓力穩定,穩定段總壓迅速下降到工作壓力附近,系統開始進入工作壓力閉環調節階段。
在引射試驗和引射下吹式試驗方式中,風洞的啟動依靠引射器輔助完成,穩定段總壓不存在啟動壓力建立過程,但仍然需要快速完成穩定段和管道迅速填充過程,并在適當時機啟動引射器,完成流場建立過程。經過試驗總結,這種方式下主調壓閥與引射器調壓閥配合過程是:開始試驗后,主調壓閥在核心控制器控制下快速開到啟動安全開度位置,迅速完成穩定段和管路填充工作,當穩定段總壓達到目標啟動壓力85%后,引射器開始工作,同時啟動控制模塊檢測當前氣源壓力,根據目標壓比和閥門特性曲線,計算工作壓力主調壓閥目標開度,然后控制主調壓閥到目標位置,等待1s后,穩定段壓力穩定,穩定段總壓迅速下降到工作壓力附近,系統開始進入工作壓力閉環調節階段。
2.2 穩定段工作壓力智能控制策略
2.2.1 串級控制
對于穩定段總壓控制,受控變量是穩定段總壓,操縱變量是主調壓閥開度,由于穩定段容積很大,總壓控制是典型的滯后過程。在風洞流場控制過程中,當主調壓閥開度變化時,穩定段總壓變化要延遲一段時間(大約1.5s),且變化緩慢。如果采用傳統的單回路PID控制,由于相對主調壓閥而言總壓反應存在滯后,會造成單回路控制不及時,最終導致控制過程不穩定,發生震蕩。為了改善控制特性,2m×2m超聲速風洞總壓采用了串級控制。
串級控制一般由兩個控制環串接而成,一個控制器的輸出作為另一個控制器的設定值,兩個控制器有各自獨立的測量輸入,串級控制原理圖如圖4。傳遞函數是:
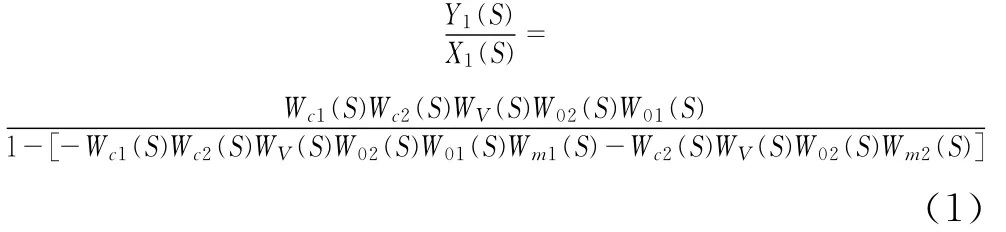
對于二次擾動,其傳遞函數為:


而對于同樣假設條件的單級回路比例調節器,其二次抗干擾能力僅為Kc,因此串級控制系統克服二次干擾的能力大于單回路控制系統(約10~100倍)。
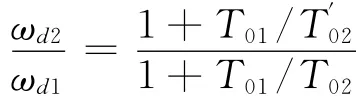
為了分析串級控制系統的響應速度和工作頻率,假設系統為雙容對象,單回路和串級控制系統如圖5,假設兩系統衰減比相等,經推理可以知道,兩控制回路的工作效率比見式(4),因此,串級控制系統由于副回路的存在,提高了系統的工作頻率,減小了振蕩周期,在衰減系數相同的情況下,縮短了調節時間,提高了系統的快速性。
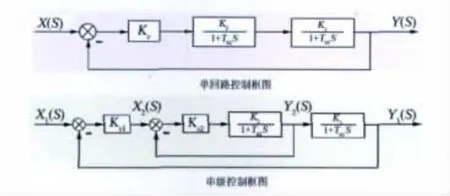
圖5 雙容對象單回路和串級控制系統框圖Fig.5 The flow chart of the double-tank single-loop control systerm and the cascade control system

同樣,由于串級控制系統副回路的傳遞函數為:

正是由于串級控制具有抗干擾、改善過程的動態特性和提高系統的工作頻率的特點,2m×2m超聲速風洞總壓控制采用了串級控制,原理框圖見圖6。控制系統由兩個回路組成,主回路是一個定值控制系統,用于實現穩定段目標總壓控制,副回路是主調壓閥位置控制,由于副回路應具有較小的純滯后和時間常數,因此副回路采用了有較快速的響應比例調節器。主調壓閥調節器的任務是保證穩定段總壓穩定并滿足精度要求,主回路總壓控制采用智能PID控制。
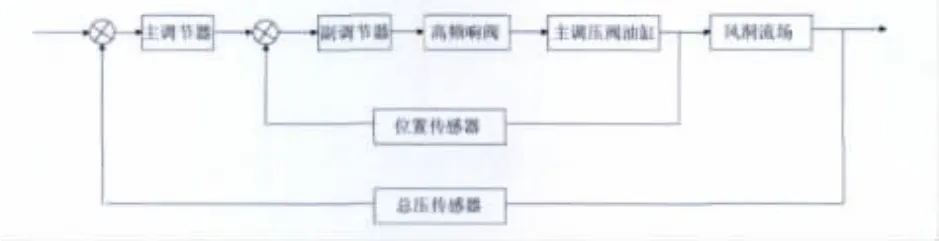
圖6 總壓串級控制系統的構成框圖Fig.6 The flow chart of the total pressure cascade control system
2.2.2 主回路智能PID控制
傳統PID控制器可表示為:

式中kp、ki和kd分別為比例系數、積分系數和微分系數,T為采樣時間,e為偏差。PID控制算法各環節的基本意義是:比例控制是基于偏差進行調節的,是有差調節,為了盡量減小偏差同時也為了加快響應速度,縮短調節時間,就需要增大kp,但是kp又受到系統穩定性的限制,不能任意增大;積分ki是為了消除靜差而引入的,但ki的引入使得響應的快速性下降,穩定性變差,尤其在大偏差階段的積分往往使得系統響應出現過大的超調,調節時間變長;微分kd的引入使之能夠根據偏差變化的趨勢作出反應,加快對偏差變化的反應速度,能夠有效地減小超調,縮小最大動態偏差,但同時又使系統容易受到高頻干擾的影響。因此,在風洞流場建立后目標壓力控制過程中主要是合理地整定這3個參數。在風洞流場控制過程中,根據風洞目標馬赫數、目標總壓不同,以及在不同誤差范圍內控制規律的變化,以智能的方式利用這些知識來智能設計和調節PID參數便構成專家PID控制。
在風洞總壓控制中,e(k)表示離散化的當前采樣時刻的總壓誤差值,e(k-1)、e(k-2)分別表示前一個和前兩個采樣時刻的誤差值,則有:

根據誤差及其變化,專家PID控制器比例系數、積分系數和微分系數分為以下5種情況進行調節設計。
(1)當∣e(k)∣>M1時,說明誤差的絕對值已經很大。不論誤差變化趨勢如何,都應考慮控制器的輸出按最大(或最小)輸出,以達到迅速調整誤差,使誤差絕對值以最大速度減小。
(2)當e(k)Δe(k)>0時,說明誤差在朝誤差絕對值增大方向變化,或誤差為某一常值,未發生變化。此時,如果∣e(k)∣>M2,說明誤差也較大,由控制器實施較強的控制作用,以達到扭轉誤差絕對值朝減小方向變化,并迅速減小誤差的絕對值,控制器輸出為:

此時,如果|e(k)|<M2,說明盡管誤差朝絕對值增大方向變化,但誤差絕對值本身并不很大,只要扭轉誤差的變化趨勢,使其朝誤差絕對值減小方向變化,控制器輸出為:

(3)當 Δe(k)<0、Δe(k)Δe(k-1)>0或者 Δe(k)=0時,說明誤差的絕對值朝減小的方向變化,或者已經達到平衡狀態。此時保持控制器輸出不變。
(4)當 Δe(k)Δe(k)<0、Δe(k)Δe(k-1)<0時,說明誤差處于極值狀態。如果此時誤差的絕對值較大,即∣e(k)∣≥M2,可考慮實施較強的控制作用

(5)當∣e(k)∣≤ε時,說明誤差的絕對值很小,此時加入積分,減少穩態誤差。
式中,em(k)為誤差e的第k個極值;U(k)為第k次控制器的輸出;U(k-1)為第k-1次控制器的輸出;k1為增益放大系數,k1>1;k2為抑制系數,0<k2<1;M1,M2為設定的誤差界限,M1>M2;k為控制周期的序號(自然數);ε為任意正實數。
2.2.3 正反向控制系數智能調節
對于下吹式暫沖型風洞,主調壓閥對穩定段總壓正反向誤差調節能力存在差別,當實際總壓高于目標總壓時,由于氣源壓力在風洞運行過程中本身存在下降的趨勢,穩定段總壓下降對閥門動作很敏感;當實際總壓低于目標總壓時,由于穩定段罐容很大,氣源壓力在風洞運行過程中本身存在下降的趨勢,總壓向上調節能力較差,因此,在穩定段總壓控制過程中,根據誤差范圍、誤差正負和目標馬赫數采用正反向控制系數來自動適應這種調節能力的差異,調節原理如圖7所示。正反向控制系數智能調節原理是:風洞試驗為低馬赫數時,當誤差為負值且在精度范圍之內時控制系數取零,當誤差超出精度范圍后,控制系數增大,但最大不超出某上限值,并且控制系數隨誤差改變的幅度和上限值隨目標馬赫數增大而增大;風洞試驗目標馬赫數為高馬赫數時,控制系數設置為1,從而使主調壓閥壓閥對總壓上下誤差控制能力相同。
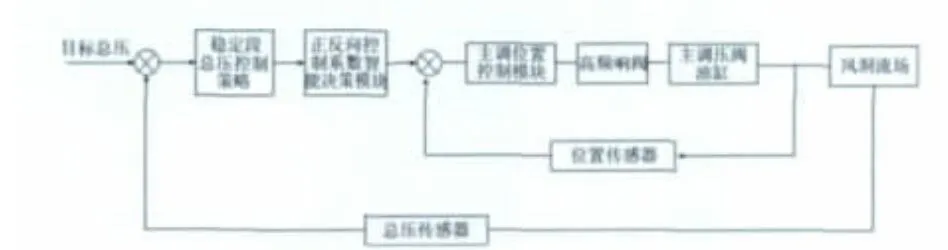
圖7 正反向控制系數決策框圖Fig.7 Forward-backward control coefficient intelligent adjustment
2.3 試驗結果
通過吹風控制調試、流場校測和標模試驗,控制策略得到不斷完善,在各試驗方式中,風洞能快速啟動,并迅速建立流場,總壓控制精度優于0.2%,圖8是在高、低馬赫數下常壓試驗的控制結果,很好地反映了不同馬赫數風洞啟動過程的差別和風洞流場控制結果。

圖8 控制系統響應曲線Fig.8 The response curve of control system
3 結 論
通過吹風調試試驗,證明2m×2m超聲速風洞所采用的快速啟動、串級控制與與總壓穩定階段智能控制策略是成功的,該控制方法解決了大型下吹式風洞非線性、時變、大滯后困難,滿足了各類型試驗方式對控制系統的性能要求。
[1]ZHAI L F,CHAI T Y.Inteligent decoupling PID control of a class of complex industrial processes[C]∥Proceeding of the 6th world congress on inteligent control and automation.New York:IEEE Press,2006:485-491.
[2]YUE Hong,GAO Dongjie,LIU Sheng.Robust tuning of PID controlers for industrial process[J].Acta Automatica Sinica,1999,25(3):411-416.
[3]劉金錕.高級PID控制與MATLAB仿真[M].北京:電子工業出版社,2003.
[4]俞金壽.過程控制系統和應用[M].北京:機械工業出版社,2003:139-151.
[5]劉金錕.智能控制[M].北京:電子工業出版社,2005

褚衛華(1968-),男,山西翼城人,博士。研究方向:風洞控制與測量系統設計與研究。通訊地址:四川省綿陽市迎賓路69號設計部(621000),電話:13890147600,E-mail:nudt_cwh123@163.com
Research and realization on the control strategies of the 2m×2msupersonic wind tunnel
CHU Wei-hua,TANG Geng-sheng,WANG fan
(China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China)
The 2m×2msupersonic wind tunnel is a large injector blowdown wind tunnel,which has nonlinear,time-varying and large delay time characteristics.The interference and coupling between the total pressure control system and injection control system always occur in the injection test mode.In order to satisfy the requirement of the control system that must be of quick response and high stable-state accuracy,the control strategy is studied deeply and the method has been applied to this system successfully.
cascade control;wind tunnel;flow field;total pressure;control strategy
V235.21+3
A
1672-9897(2012)05-0098-05
2011-07-11;
2011-11-21
