基于BP神經網絡無刷直流電機換相轉矩脈動抑制方法的研究
2012-06-21 09:00:44李春峰
長春大學學報 2012年10期
李春峰
(長春大學 電子信息工程學院,長春 130022)
0 引言
無刷直流電機由于具有結構簡單、動態性能好、效率密度高、輸出轉矩大等優點,被廣泛的應用于如航空航天、汽車電子、機器人、精密電子儀表等個各個領域。但無刷直流電機又是一個多變量、時變、非線性的復雜系統,其精確的數學模型很難建立。在無刷直流電機運行過程中產生的噪聲、振動、諧振等轉矩脈動,將直接影響無刷直流電機運行的可靠性和精確度,進而影響其使用壽命。根據轉矩脈動產生的原因不同,轉矩脈動大概可以分為兩類,齒槽轉矩脈動和換相轉矩脈動,齒槽轉矩脈動可以從物理上即在生產過程中盡量減少或消除,但換相轉矩脈動是由于無刷直流電機繞組上的電感作用使無刷直流電機繞組電流換相產生而產生的,它無法通過物理方法消除,也是目前國內外學者研究的重點和難點。先后研究出重疊換相法、電流預測控制、PWM斬波法等。因此本文將設計智能控制方法即BP神經網絡參數自學習PID控制器來對無刷直流電機換相轉矩波動進行抑制,從而提高無刷直流電機控制系統性能。
1 無刷直流電機數學模型
無刷直流電機是由電動機本體、位置傳感器和驅動電路三部分組成,無刷直流電機等效電路圖如圖1所示,無刷直流電機繞組電壓平衡方程為:
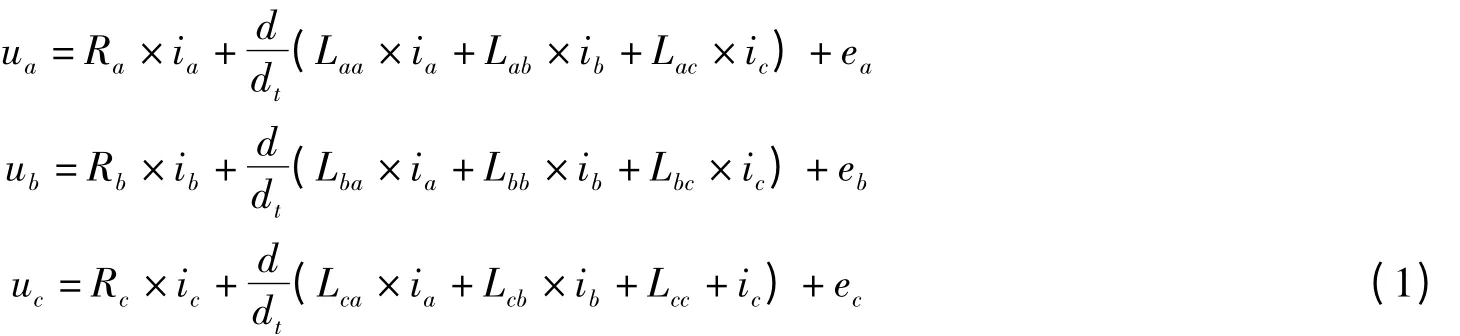
則矩陣方程為:

其中:Ra=Rb=Rc,Laa=Lbb=Lcc,Lab=Lac=Lba=Lbc=Lca=Lcb=M。
則矩陣方程可變為如下形式:

又由于ia+ia+ia=0,Mib+Mic=-Mia。則上述矩陣方程變化如下:

則無刷直流電機電磁轉矩方程為:

無刷直流電機動力學方程為:

其中:P-無刷電機極對數,J為無刷電機轉動慣量,D為粘滯系數,ω無刷電機機械轉速。
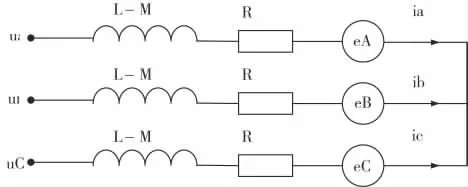
圖1 無刷直流電機等效電路圖
2 無刷直流電機換相轉矩脈動產生原因的分析[4]
無刷直流電機運行時包含換相區域和導通區域兩個運行狀態,而在無刷直流電機導通區域定子繞組有兩項導通,在換相區域定子繞組全部導通,無刷直流電機繞組A、相導通模型如圖2所示,B當定子繞組A、B相導通時無刷直流電機電流方程為:

故此時的無刷直流電機電磁轉矩為:

當無刷直流電機B相換到C相開始時,繞組續流相和導通相的回路電路方程為:

因上述無刷直流電機續流時間很短,故由此引起的感應電動勢可以忽略不計,故上述表達式可以變化如下:

而iB變化到0是所需要的時間為:

因此無刷直流電機導通回路的電流方程表達式為:

由此可知無刷直流電機電流變化的速率為:

故無刷直流電機在換相時,iBeBA、iCeCA對應的電磁功率相應減小或增加,當iBeBA-iCeCA=0時,電磁功率不變化,當其差值變化很大時,引起的無刷直流電機 換相轉矩脈動就越大。
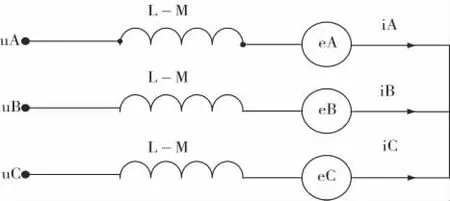
圖2 無刷直流電機繞組A、B相導通模型圖
3 無刷直流電機換相轉矩脈動的抑制
3.1 BP神經網絡參數自學習PID控制器的設計
BP神經網絡參數自學習PID控制器對無刷直流電機換相轉矩脈動抑制的結構圖如圖3所示。本文設計的控制器由PID控制器和BP神經網絡兩部分組成,BP神經網絡的自學習根據無刷直流電機的運行狀態來調整權值系數,根據BP神經網絡自身的不斷學習,使經典的PID控制器Kp、Ki和Kd在線整定,進而使整個控制系統參數達到最優,實現對無刷直流電機換相轉矩波動的抑制。
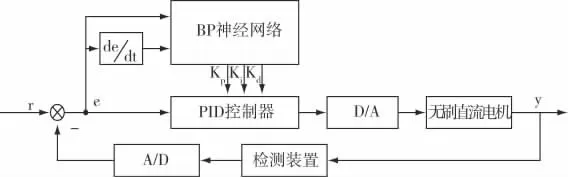
圖3 基于BP神經網絡參數自學習PID轉矩波動抑制的結構圖
3.2 基于BP神經網絡參數自學習PID換相轉矩脈動抑制控制算法的實現[8]
當控制輸入r=im,中間變量u=k,其中k為PWM信號占空比,則PID控制方程式如下:

當函數關系為非線性關系時,方程式可轉化為如下方程式:

故當整個控制系統采用BP神經網絡抑制無刷直流電機換相轉矩脈動時,通過時時在線調節PID控制器的比例系數Kp、積分系數Ki和微分系數Kd,實現對無刷直流電機的換相轉矩波動的抑制,并達到效果最佳。
本文設計的BP神經網絡采用2個輸入節點、5個隱層節點和3個輸出節點的三層神經網絡,隱含層神經元采用正負對稱的Sigmoid函數,其數學表達式為:

網絡輸入層的輸入數學表達式為:

式中:a=2,a表示輸入結點個數,其大小取決于被控制系統的復雜程度。
神經網絡隱含層輸入、輸出數學表達式為:


4 實驗分析
為了驗證BP神經網絡參數自學習PID控制器設計完成后在無刷直流電機換相轉矩脈動抑制方面的效果,本文實驗裝置采用教學儀器設備公司生產的直流無刷電機機組,將其進行改裝后,在實驗裝置中加入本文設計的BP神經網絡參數自學習PID控制器,來進性無刷直流電機換相轉矩脈動抑制試驗,通過無刷直流電機空載和加入負載100MA后轉速輸出波形觀察換相轉矩脈動抑制情況。電機采用的是額定電壓220伏;額定電流2安;額額定轉矩1.3牛米(Nm);額定功率400瓦;最大轉矩2.6牛米(Nm);定位轉矩0.04牛米(Nm);額定轉速3000轉/分;極對數5極對。數字信號處理器采用TMS320F2812,實驗結果如圖4、圖5、圖6、圖7所示。
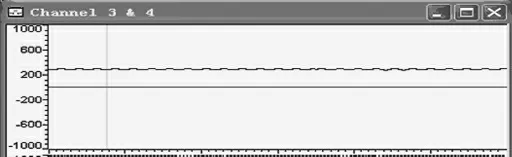
圖4 速度閉環300轉空載速度曲線
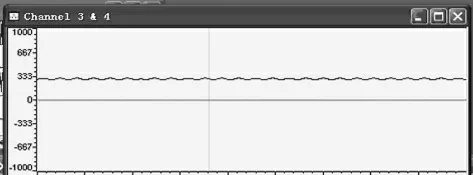
圖5 速度開環300轉空載速度曲線
圖6 閉環600轉負載100MA加載過程速度曲線
5 結語
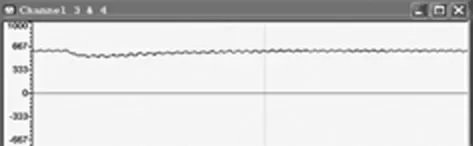
圖7 閉環600轉負載100MA去載過程速度曲線
通過以上對無刷直流電機換相轉矩脈動抑制的研究發現,設計了用于抑制換相轉矩脈動的控制器,即BP神經網絡參數自學習PID控制器,此控制器是BP神經網絡與經典PID控制相結合的智能化控制器,通過在線時時調整比例系數Kp、積分系數Ki和微分系數Kd,從而使無刷直流電機換相轉矩脈動的一直達到最優。故通過以上的研究必將對今后從事無刷直流電機研究的學者提供幫助和借鑒,同時也將進一步擴大無刷直流電機的應用空間。
[1]左旭坤,李國麗.基于神經網絡的直流無刷電機控制系統[J].控制與檢測,2006(6):53-56.
[2]王玲,程耕國,趙玉壽.基于BP神經網絡的無刷直流電機控制器優化設計[J].大電機技術,2012(2):19-21.
[3]夏長亮.無刷直流電機控制系統[M].北京:科學出版社,2009.
[4]劉剛,王志強,房建成.永磁無刷直流電機控制技術與應用[M].北京:機械工業出版社,2008.
[5]夏長亮,文德,王娟.基于自適應人工神經網絡的無刷直流電機換相轉矩脈動抑制新方法[J].中國電機工程學報,2002,22(1):54-58.
[6]許鵬,郭桂芳,王曹軍義,侯哲,曹秉剛.直流無刷電機神經網絡直接轉矩控制[J].中國電機工程學報,2009,29(12):192-196.
[7]荊濤.無位置傳感器無刷直流電機調速系統的研究[D].西安:西北工業大學,2005.
[8]姜長生,王從慶,魏海坤,陳謀.智能控制與應用[M].北京:科學出版社,2007.
