基于分段搜索的CMMB粗同步算法
2012-06-25 07:02:32張峰,田園,2
電視技術(shù) 2012年7期
張 峰,田 園,2
(1.中國(guó)科學(xué)研究院自動(dòng)化所,北京100190;2.中國(guó)地質(zhì)大學(xué)(北京)地球物理與信息技術(shù)學(xué)院,北京 100083)
中國(guó)移動(dòng)多媒體廣播(CMMB)系統(tǒng)物理層調(diào)制方式采用正交頻分復(fù)用(OFDM)技術(shù)[1],把整個(gè)信道分成互相正交的子信道,具有頻譜利用率高且抗多徑衰落能力強(qiáng)的特點(diǎn)。但由于解調(diào)時(shí)子載波間必須保持嚴(yán)格的正交性,所以O(shè)FDM系統(tǒng)對(duì)定時(shí)誤差和載波頻偏的敏感程度比單載波高得多[2],CMMB接收機(jī)中同步算法的選擇對(duì)系統(tǒng)性能有較大影響。
CMMB數(shù)據(jù)時(shí)隙結(jié)構(gòu)如圖1所示[1]。每一時(shí)隙的起始位置有兩個(gè)完全相同的同步信號(hào),這兩個(gè)同步信號(hào)是具有很強(qiáng)相關(guān)性的偽隨機(jī)序列。由文獻(xiàn)[3-6]可知,如果將這兩個(gè)同步信號(hào)互相關(guān),會(huì)得到一個(gè)很大的相關(guān)值;而如果同步信號(hào)與相鄰的OFDM符號(hào)互相關(guān),其相關(guān)值會(huì)有明顯降低。粗同步模塊中通過(guò)檢測(cè)相關(guān)值的峰值來(lái)捕獲CMMB時(shí)隙并給出FFT開(kāi)窗定時(shí)信息。

圖1 CMMB數(shù)據(jù)時(shí)隙結(jié)構(gòu)
1 CMMB粗同步算法原理
利用同步信號(hào)具有強(qiáng)相關(guān)性這一特點(diǎn),CMMB接收機(jī)的粗同步模塊采用最大相關(guān)算法(MC算法)[7-8],其原理為:從接收數(shù)據(jù)中存儲(chǔ)一段數(shù)據(jù),從數(shù)據(jù)頭開(kāi)始取4096點(diǎn)的滑動(dòng)窗,將滑動(dòng)窗內(nèi)前2048點(diǎn)與后2048點(diǎn)分別互相關(guān)并求和,相關(guān)和達(dá)到峰值時(shí)對(duì)應(yīng)的滑動(dòng)窗的位置即為同步信號(hào)出現(xiàn)的位置。檢測(cè)到同步信號(hào)位置后,可推算得到CMMB數(shù)據(jù)幀中其他符號(hào)的位置。圖2為CMMB定時(shí)粗同步模塊的基本框圖。
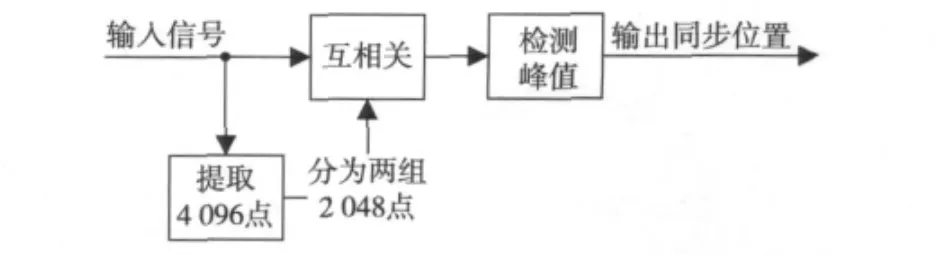
圖2 CMMB定時(shí)粗同步框圖
圖2中,設(shè)存儲(chǔ)的數(shù)據(jù)段長(zhǎng)度為N,滑動(dòng)窗中相關(guān)和的表達(dá)式為

由于相鄰兩個(gè)滑動(dòng)窗求相關(guān)和時(shí)只相差一組數(shù)據(jù),為降低運(yùn)算量,r(t)可以遞歸表示為

相關(guān)和取最大值時(shí),滑動(dòng)窗中的4096點(diǎn)即為同步信號(hào),同步信號(hào)偏移位置(即第1個(gè)同步信號(hào)的第1點(diǎn))d由式(3)求出

在8 MHz模式下,1個(gè)CMMB時(shí)隙包含25萬(wàn)個(gè)數(shù)據(jù)[1],粗同步算法中,如果處理的數(shù)據(jù)段長(zhǎng)度僅等于250000,可能會(huì)出現(xiàn)同步信號(hào)分布在數(shù)據(jù)段兩端的情況而無(wú)法得到相關(guān)和的峰值。為保證提取的數(shù)據(jù)段中包含1個(gè)完整的同步信號(hào),數(shù)據(jù)段的長(zhǎng)度需滿足N≥254095。如圖3所示,滑動(dòng)窗在最后4096點(diǎn)處可包含1個(gè)完整的同步信號(hào)。

圖3 數(shù)據(jù)段中同步信號(hào)分布情況
2 利用DSP實(shí)現(xiàn)CMMB粗同步的優(yōu)缺點(diǎn)
2.1 基于DSP的CMMB接收機(jī)的優(yōu)點(diǎn)
傳統(tǒng)的CMMB接收機(jī)大多采用硬件電路實(shí)現(xiàn)。硬件電路具有結(jié)構(gòu)簡(jiǎn)單、易實(shí)現(xiàn)的特點(diǎn),但其結(jié)構(gòu)固定不可修改,因此也帶來(lái)環(huán)境適應(yīng)性差、無(wú)法兼容其他標(biāo)準(zhǔn)等缺點(diǎn)。
采用DSP實(shí)現(xiàn)CMMB接收機(jī),一方面可以通過(guò)檢測(cè)到的信道環(huán)境實(shí)時(shí)調(diào)整軟件中算法的實(shí)現(xiàn)方式,從而實(shí)現(xiàn)接收性能和運(yùn)算量的最優(yōu)結(jié)合,另一方面由于基于OFDM技術(shù)的通信系統(tǒng)(如LTE,CMMB)的同步算法原理相同,在不改動(dòng)系統(tǒng)硬件的基礎(chǔ)上可通過(guò)修改軟件中的算法實(shí)現(xiàn)多標(biāo)準(zhǔn)通信系統(tǒng)間的轉(zhuǎn)換,從而降低系統(tǒng)的整體成本。
2.2 基于DSP的粗同步算法面臨的問(wèn)題
在DSP中實(shí)現(xiàn)粗同步算法時(shí),需要先將數(shù)據(jù)存儲(chǔ)下來(lái),再進(jìn)行同步頭搜索。第1節(jié)介紹的粗同步算法中需要一次存儲(chǔ)254095個(gè)16 bit復(fù)數(shù),占用約8 Mbit空間,由于手持設(shè)備的功耗和面積的限制,無(wú)法配置如此巨大的存儲(chǔ)器空間,因此必須對(duì)算法進(jìn)行優(yōu)化并減小需要的存儲(chǔ)器空間。筆者針對(duì)DSP片內(nèi)存儲(chǔ)器小的限制,提出了一種基于分段搜索的并且在DSP上實(shí)現(xiàn)的粗同步改進(jìn)算法。
3 基于分段搜索的粗同步改進(jìn)算法
由CMMB時(shí)隙結(jié)構(gòu)可知,每個(gè)時(shí)隙開(kāi)頭都有2個(gè)已知的同步信號(hào),也就是說(shuō),不同時(shí)隙中所包含的同步信號(hào)相同。又由于每個(gè)時(shí)隙持續(xù)25 ms,且在接收到的信號(hào)中同步信號(hào)位置是未知的,則同步信號(hào)可描述為位置未知且每隔25 ms出現(xiàn)1次的周期信號(hào)。在存儲(chǔ)空間足夠大的情況下,需連續(xù)存儲(chǔ)254095個(gè)數(shù)據(jù),且檢測(cè)到同步信號(hào)的最小時(shí)長(zhǎng)為25.4095 ms。
為節(jié)省存儲(chǔ)空間,分段搜索算法的主要思想為:將一次處理的數(shù)據(jù)段長(zhǎng)度從一個(gè)時(shí)隙減小到較短的數(shù)據(jù)段,利用同步信號(hào)出現(xiàn)的周期性,通過(guò)對(duì)多個(gè)數(shù)據(jù)段分別搜索得到同步頭位置。實(shí)現(xiàn)時(shí)將一個(gè)時(shí)隙數(shù)據(jù)分為若干段,這些數(shù)據(jù)段在時(shí)隙中取不同位置,相鄰兩個(gè)數(shù)據(jù)段邊緣互相重合,所有數(shù)據(jù)段聯(lián)合起來(lái)組成一個(gè)完整的時(shí)隙,如圖4所示。每次僅存儲(chǔ)其中的一段數(shù)據(jù),之后空出一定的時(shí)間對(duì)這段數(shù)據(jù)處理,處理時(shí)應(yīng)用式(1)~(3)。粗同步模塊中循環(huán)進(jìn)行“存儲(chǔ)—處理”的操作直到檢測(cè)到同步信號(hào),流程圖如圖5所示。

圖4 算法中提取數(shù)據(jù)段的分布

圖5 基于DSP的粗同步算法流程圖
其中規(guī)定數(shù)據(jù)段的存儲(chǔ)長(zhǎng)度為N,數(shù)據(jù)段處理時(shí)間等效數(shù)據(jù)點(diǎn)數(shù)P。由于DSP處理器處理時(shí)長(zhǎng)P大于數(shù)據(jù)存儲(chǔ)長(zhǎng)度N,在進(jìn)行數(shù)據(jù)處理的同時(shí)不保存新的數(shù)據(jù),因此,這部分信號(hào)將丟失,考慮到同步信號(hào)的周期性及分段數(shù)據(jù)的覆蓋性,此部分信號(hào)在其后的時(shí)隙中就進(jìn)行檢測(cè)。最長(zhǎng)檢測(cè)時(shí)間由數(shù)據(jù)段的存儲(chǔ)長(zhǎng)度N和數(shù)據(jù)段處理時(shí)間P決定。
不同時(shí)隙中時(shí)域上相鄰的兩段數(shù)據(jù)間應(yīng)有M≥4095點(diǎn)相互重合的數(shù)據(jù),以避免同步信號(hào)正好位于兩段數(shù)據(jù)之間的情況。
4 改進(jìn)算法性能分析
實(shí)際參數(shù)N和P是通過(guò)綜合考慮DSP的存儲(chǔ)能力和運(yùn)算處理時(shí)間來(lái)確定,減小N是以檢測(cè)時(shí)間變長(zhǎng)且檢測(cè)時(shí)隙增多為代價(jià)的,正如第3節(jié)中所述,檢測(cè)時(shí)間延長(zhǎng)尚對(duì)系統(tǒng)性能無(wú)影響。
4.1 改進(jìn)算法分析及測(cè)試
圖4中,設(shè)定存儲(chǔ)長(zhǎng)度N=35000點(diǎn)、處理長(zhǎng)度P=50000點(diǎn)、重合數(shù)據(jù)M=5000點(diǎn),數(shù)據(jù)處理流程如下:每個(gè)“存儲(chǔ)—處理”周期占用85000個(gè)點(diǎn)。先存儲(chǔ)35000個(gè)點(diǎn),利用接收其后50000個(gè)點(diǎn)的時(shí)間對(duì)存儲(chǔ)的350000個(gè)點(diǎn)進(jìn)行處理,檢測(cè)這350000點(diǎn)的相關(guān)和的峰值并將其與本地產(chǎn)生的模板進(jìn)行模板匹配,匹配成功則說(shuō)明這段數(shù)據(jù)中包含同步信息,這時(shí)給出同步定時(shí)位置并退出粗同步模塊;匹配失敗說(shuō)明這段數(shù)據(jù)中不包含同步信息,還需要在下一數(shù)據(jù)段中進(jìn)行檢測(cè)匹配。
圖4給出了需要檢測(cè)的數(shù)據(jù)段的位置在3個(gè)時(shí)隙中的分布情況,圖中第4行表示將所有數(shù)據(jù)段聯(lián)合起來(lái)的情況,可以看出9個(gè)數(shù)據(jù)段可以覆蓋一個(gè)完整的時(shí)隙。由于在接收到的時(shí)隙中同步信號(hào)的位置是未知的,如果同步信號(hào)在數(shù)據(jù)段1中,那么在第1個(gè)時(shí)隙的第1個(gè)數(shù)據(jù)段就可匹配成功,檢測(cè)時(shí)間最短,運(yùn)算量最少;如果同步信號(hào)包含在數(shù)據(jù)段9中,這時(shí)需要檢測(cè)的時(shí)間最長(zhǎng),需要到第3個(gè)時(shí)隙的最后1個(gè)數(shù)據(jù)段才能匹配到同步頭,同時(shí)運(yùn)算量也最多。
按照以上參數(shù)在AD公司TS101S處理器上進(jìn)行測(cè)試。設(shè)定工作頻率為150 MHz(實(shí)際手持設(shè)備中芯片處理能力和工作頻率受限,以上參數(shù)需要重新設(shè)定),實(shí)測(cè)處理1個(gè)數(shù)據(jù)段的時(shí)間為4.3092 ms,小于數(shù)據(jù)段處理時(shí)間5 ms,滿足設(shè)計(jì)要求。
綜合以上分析,利用本文介紹的粗同步算法,以N=35000點(diǎn),P=50000點(diǎn)為例,最多在3個(gè)時(shí)隙內(nèi)就可以檢測(cè)到定時(shí)信息。
4.2 性能對(duì)比
由于基于硬件實(shí)現(xiàn)的粗同步模塊和基于DSP實(shí)現(xiàn)的粗同步模塊都采用式(1)~(3)的運(yùn)算過(guò)程,所以兩種方法在不同信道環(huán)境下表現(xiàn)出的性能是相同的。本文提出的基于DSP的分段存儲(chǔ)的改進(jìn)算法優(yōu)點(diǎn)在于:在不改變算法性能的前提下,解決了數(shù)據(jù)存儲(chǔ)空間過(guò)大導(dǎo)致無(wú)法在DSP內(nèi)實(shí)現(xiàn)的缺點(diǎn),從而進(jìn)一步提高了數(shù)據(jù)處理速度。表1中分析比較了存儲(chǔ)一個(gè)時(shí)隙數(shù)據(jù)和分段存儲(chǔ)數(shù)據(jù)兩種算法的性能。

表1 性能參數(shù)比較
對(duì)兩種算法的參數(shù)進(jìn)行分析:
1)對(duì)比兩種算法需要的存儲(chǔ)空間,傳統(tǒng)算法需要8 Mbit內(nèi)存,改進(jìn)后的算法則僅需要1 Mbit左右,有利于DSP實(shí)現(xiàn)。
2)對(duì)比兩種算法的檢測(cè)時(shí)間,分析圖4可知,當(dāng)同步信號(hào)的位置出現(xiàn)在前2個(gè)時(shí)隙的數(shù)據(jù)段中時(shí),也就是說(shuō),如果在前2個(gè)時(shí)隙就能檢測(cè)到同步頭,改進(jìn)算法在檢測(cè)時(shí)間和運(yùn)算量方面都是優(yōu)于傳統(tǒng)算法的;只有當(dāng)同步信號(hào)處在第3個(gè)時(shí)隙的數(shù)據(jù)段中時(shí)(數(shù)據(jù)段3,6,9),傳統(tǒng)算法的檢測(cè)時(shí)間比改進(jìn)算法的檢測(cè)時(shí)間短。計(jì)算得知:改進(jìn)算法檢測(cè)到同步頭最慢的情況(同步頭在數(shù)據(jù)段9中時(shí))會(huì)比傳統(tǒng)算法的時(shí)間長(zhǎng)31.3 ms,僅略長(zhǎng)于一幀數(shù)據(jù),對(duì)系統(tǒng)性能影響很小。
3)對(duì)比兩種算法的運(yùn)算量,與檢測(cè)時(shí)間相似,觀察表1及圖4可知,只有當(dāng)同步信息在數(shù)據(jù)段9中時(shí),改進(jìn)算法的運(yùn)算量才大于傳統(tǒng)算法,比傳統(tǒng)算法多做了24536次滑動(dòng)相關(guān)運(yùn)算;其他情況下,改進(jìn)算法的運(yùn)算量均小于傳統(tǒng)算法。同時(shí),運(yùn)算量的減小也減少了電池電量的消耗。
5 結(jié)論
這里介紹了一種基于DSP的粗同步算法,該算法降低了數(shù)據(jù)存儲(chǔ)量,并且可以將數(shù)據(jù)存儲(chǔ)在DSP片內(nèi)。仿真結(jié)果表明:在不降低算法性能的前提下,該算法實(shí)現(xiàn)了降低存儲(chǔ)空間并準(zhǔn)確定時(shí)的目的。對(duì)于手持設(shè)備來(lái)說(shuō),這樣既提高了數(shù)據(jù)處理速度又減小了手持設(shè)備的體積。這種算法不僅為CMMB接收機(jī)模塊提供了一種在DSP片內(nèi)存儲(chǔ)數(shù)據(jù)的方案,對(duì)基于DSP的其他通信系統(tǒng)中定時(shí)同步算法的設(shè)計(jì)也具有參考意義。
[1]國(guó)家廣播電影電視總局廣播科學(xué)研究院.GY-T 220.1—2006,移動(dòng)多媒體廣播第1部分:廣播信道幀結(jié)構(gòu)、信道編碼和調(diào)制[S].2006.
[2]佟學(xué)儉,羅濤.OFDM移動(dòng)通信技術(shù)理論與應(yīng)用[M].北京:人民郵電出版社,2003.
[3]李洋,楊波.CMMB接收機(jī)符號(hào)同步與載波同步算法設(shè)計(jì)[J].電視技術(shù),2009,33(S2):9-11.
[4]黃謝學(xué),林平分.CMMB接收機(jī)中的粗載波頻偏估計(jì)[J].電視技術(shù),2009,33(S2):14-16.
[5]劉仁品,張振冬,林平分.CMMB系統(tǒng)中的時(shí)鐘同步算法[J].電視技術(shù),2009,33(S2):7-8.
[6]董斌,王匡,仇佩亮.OFDM系統(tǒng)在多徑衰落信道下的時(shí)鐘同步[J].浙江大學(xué)學(xué)報(bào):工學(xué)版,2005(7):935-938.
[7]毛劍慧,黑勇,喬樹(shù)山.基于CMMB系統(tǒng)的同步設(shè)計(jì)與實(shí)現(xiàn)[J].電子技術(shù)應(yīng)用,2009(2):104-107.
[8]包晗.基于CMMB信號(hào)同步算法的研究[J].現(xiàn)代電子技術(shù),2010(11):82-85.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25