高速永磁同步風電機組低電壓穿越的研究
2012-06-26 00:52:22莊圣賢許永衡
電氣傳動自動化 2012年2期
關鍵詞:發電機
李 昊,莊圣賢,許永衡,周 蘭
(西南交通大學電氣工程學院,四川 成都 610031)
1 引言
近幾年來,在變速恒頻風電系統中,使用雙饋感應發電機雙饋型風電系統占市場份額最大,而使用永磁同步風力發電機的直驅型及高速永磁電機的風力發電機組發展也很快。其中采用高速永磁同步電機的風力發電機組,因為采用了高速永磁同步發電機,使得電機的體積相比永磁直驅型電機明顯地縮小,其電機的成本也大大降低。高速永磁風力發電機組在拓撲結構、成本、經濟效益以及應對電網故障等方面具有獨特的優勢。
隨著風電裝機容量的增加,電網故障對風機的影響受到越來越多的重視。在電網電壓跌落到一定深度時,必須保證風機在曲線上方不脫網,對電網提供無功支持,直至電壓恢復,要求風電系統具有低電壓穿越能力[1]。目前國內外對雙饋感應發電機風電系統低電壓穿越特性研究的較多[2],但對高速永磁同步風電機組變流器的整體建模和研究還不是很多,對其低電壓穿越特性的研究也少。
因此,本文從研究高速永磁同步發電機組低電壓穿越特性出發,對發電機、發電機側變流器、電網側變流器進行了建模,詳細分析了各部分的工作原理。基于Matlab/Simulink構建了高速永磁同步發電機風電機組的仿真模型,以及低電壓穿越函數,對其在電網跌落時的穿越特性進行了分析。通過對永磁同步發電機定子電流的解耦,實現發電機轉矩和定子電壓的控制。在低電壓跌落時,網側變流器通過控制直流母線電壓和網側功率因數,在直流母線側卸載負荷,在網側提供無功功率支持電網,實現低電壓穿越,使系統能正常運行。
2 高速永磁同步風電機組工作原理
高速永磁同步發電機風電機組模型如圖1所示。風輪機經增速齒輪箱與永磁同步發電機轉子相連接,能夠更好地吸收利用低風速時的風能。在發電機定子和電網間采用雙PWM背靠背的全功率變流器,實現了發電機和電網的完全解耦,對電網適用性強,易于實現低電壓穿越[3]。
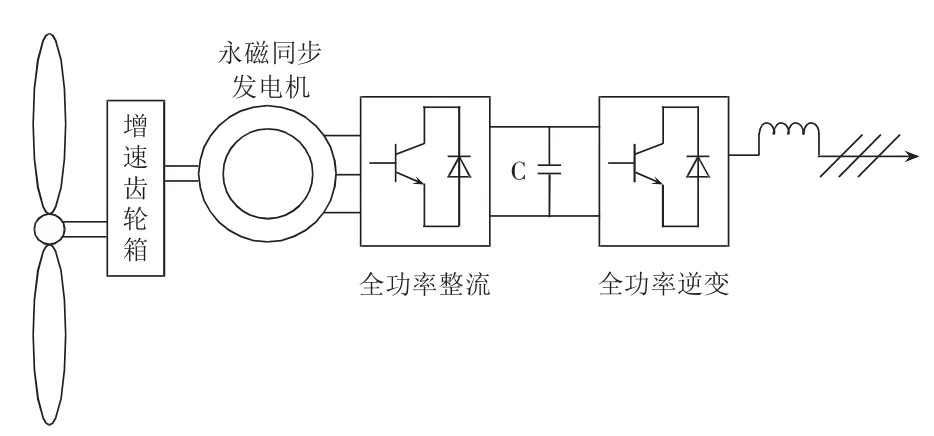
圖1 高速永磁同步發電機風電機組模型
通過機側變流器實現機組的有功功率跟蹤,對電網側變流器進行控制,以實現直流母線電壓恒定和流向電網的無功功率。直流母線側加有卸荷電阻,在電網電壓跌落時消耗直流側的多余能量。當電網發生電壓跌落時,只需在網側逆變器和和直流側采取措施,而不影響到機側變流器和發電機的正常運行[4]。
3 仿真模型的建立
3.1 永磁同步發電機和風力機模型
發電機和風力機模型之間的關系是通過轉矩和角速度來連接的。
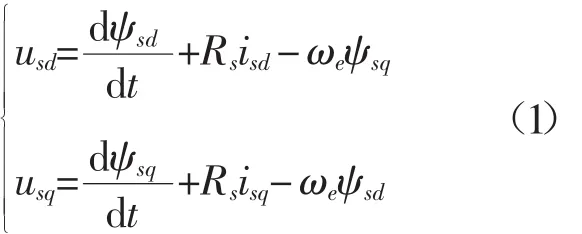
利用坐標變換理論,在dq旋轉坐標系下建立永磁同步發電機的數學模型。取永磁同步發電機的轉子磁極為 d軸,q軸超前d軸90°,則其在穩態下的電壓方程為:式中:usd、usq為電機端電壓 dq 軸分量;ψsd、ψsq為定子磁鏈dq分量;isd、isq為定子電流dq軸分量;Rs為發電機定子繞組每相電阻。
電磁轉矩方程為:

式中:p為極對數。
運動方程為:

式中:ωr為發電機轉子機械角速度,單位 rad/s,且ωr=ωe/p;J為發電機的轉動慣量,單位 kg·m2;F 為粘滯系數;Tm為發電機轉子的機械轉矩,單位N·m。
由公式(2)可知,當發電機參數一定時,控制發電機定子電流isd、isq就可實現發電機電磁轉矩Te的控制。由式(3)能看出,轉速ωr的加速度值由輸入機械轉矩Tm和輸出電磁轉矩Te之差決定。發電機的電壓ud、uq和轉速ωe成固定比例。因此,控制發電機的交直電流就能實現對發電機轉速和電壓的控制。
3.2 機側變流器模型
圖2所示為采用電流內環、轉矩外環的雙環控制方式的機側變流器控制框圖。通過檢測發電機的三相電流值和機側變流器的空間矢量調制狀態,計算出發電機的轉矩和磁鏈大小,發電機轉子位置。轉矩和磁鏈大小與轉矩參考值T*、定子磁鏈參考值相比較,通過電壓開關矢量表,控制機側變流器IGBT的開關狀態,使發電機輸出要求調節的轉矩,實現控制轉速的目的。
3.3 網側變流器模型
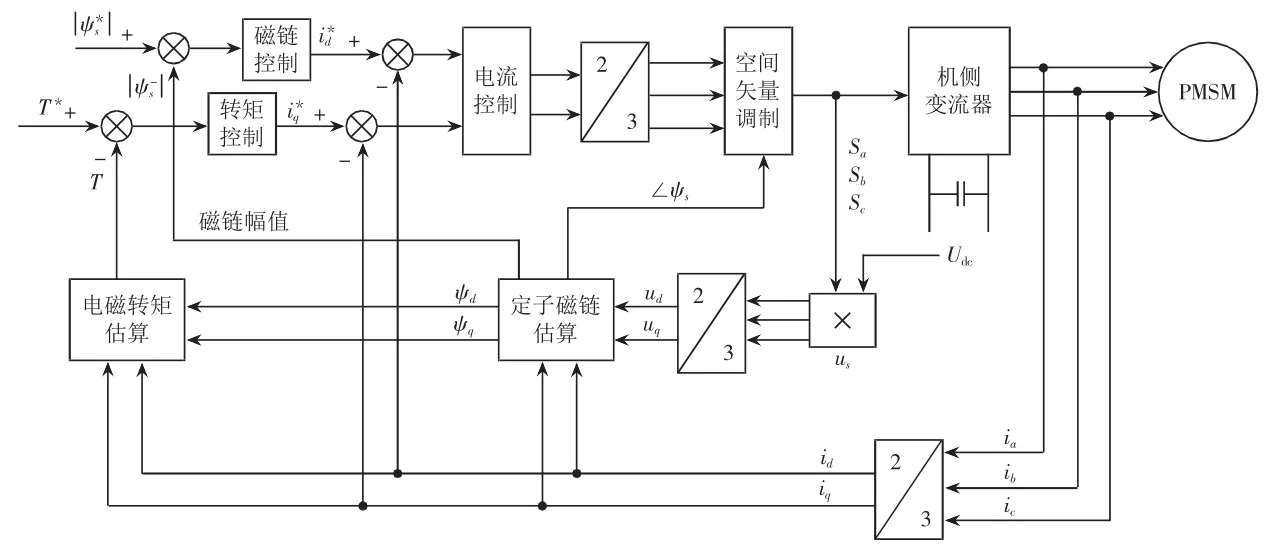
圖2 機側變流器的控制框圖
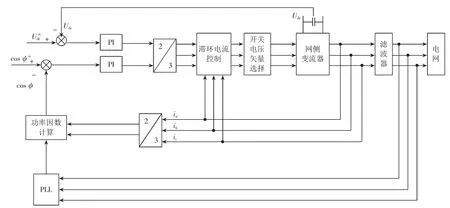
圖3 網側變流器控制框圖
圖3所示為網側變流器的雙環控制模型。直流電壓回路用狀態向量控制方法,傳輸有功功率,能夠實現有功功率的恒穩態精確和較高的動態控制。閉環控制能快速抑制負載變化,控制負載階躍變化時間<10ms。內環采用電流滯環控制,該控制對輸出電壓突變具有不敏感性,它獨立于電網電壓,甚至在短路時電流控制環仍然能運行。電流參考值是和線電壓相匹配的,因此變換出有功和無功電流部分,在電網電壓跌落時,能夠靈活調節功率因數,滿足電網動態實時的無功需求。
低電壓穿越主要依靠網側逆變器來實現的。在電網電壓瞬間跌落時,發電機輸出的瞬時功率不變,而變流器輸出功率會減小,這樣功率不平衡將導致DC-link(直流母線)電壓上升[5]。電網電壓跌落時,機側變流器只需保持永磁發電機的正常運行,發電機發出的多余能量通過直流母線的卸載負荷來卸載,網側變流器實現低電壓穿越。
3.4 電網電壓和電網跌落模型
電網模型由電壓源、電網故障阻抗、風機變壓器和變電站變壓器構成。根據E.ON2006低電壓穿越技術要求,在Matlab M文件里創建出了滿足其跌落要求的電壓曲線的函數。
4 系統仿真研究
為了驗證理論分析的正確性,建立了高速永磁同步發電機風力發電系統的仿真模型,并對不同深度的電壓跌落進行仿真。電壓跌落前,風電系統以單位功率因數運行,即網側變流器無功給定為0。對于不對稱的電壓跌落,通過監視逆序電網電壓分量來識別不對稱故障,并對有功和無功功率用分離參數表進行調整,來實現低電壓穿越。本仿真中的電壓跌落是指三相對稱電壓跌落。從3.0s跌落開始到3.6s跌落結束,電壓跌落的幅度為30%。在8.0s到10s,電壓跌落的幅度是60%。仿真中各參數以標幺值表示。
永磁同步發電機的具體參數設置如下:P=2MW,U=690V,T=16KN·m,極對數為 3。
在風電機組啟動時,網側無功功率設置0,實際無功功率也為0,在電網無故障時,線電壓沒有跌落。圖4所示為轉矩參考值的控制。從圖4可以看出,高速永磁同步發電機的有功功率能夠很好地跟蹤有功功率參考。
圖5所示為30%電壓跌落時的仿真波形。從圖5的波形可以看出,網側電壓跌落到額定值的30%,有功電流變為0,而無功電流為1,電流全部由無功電流提供,保持總的線電流不變。視在功率從1變為0.3。無功功率的支持必須以有功功率的減少為代價。變流器全部輸出無功,支持電網電壓。實際中,有功功率為0,電流來不及突變,在電壓跌落時,有功功率降低很多,電壓恢復時,有功功率升高很多。無功功率在電壓跌落時突然升高到0.3,對電網進行無功補償。
電網電壓恢復時,有功功率經短暫的尖峰振蕩后,迅速恢復到額定值。無功電流在電壓跌落和恢復的瞬間都出現一個小的波動。
仿真表明,網側變流器能夠持續工作,并且提供無功功率。
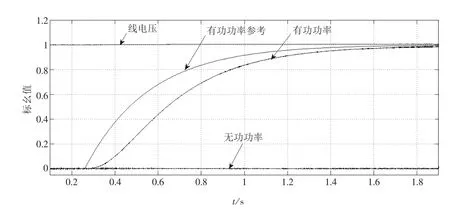
圖4 轉矩參考值的控制
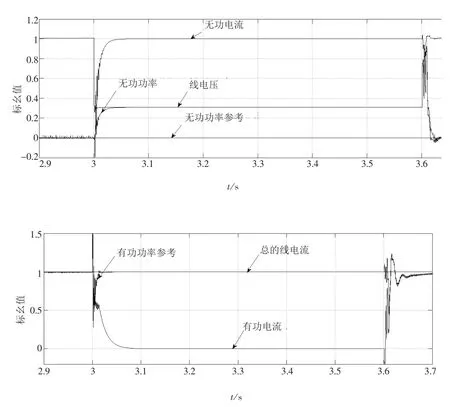
圖5 30%電壓跌落時的仿真波形
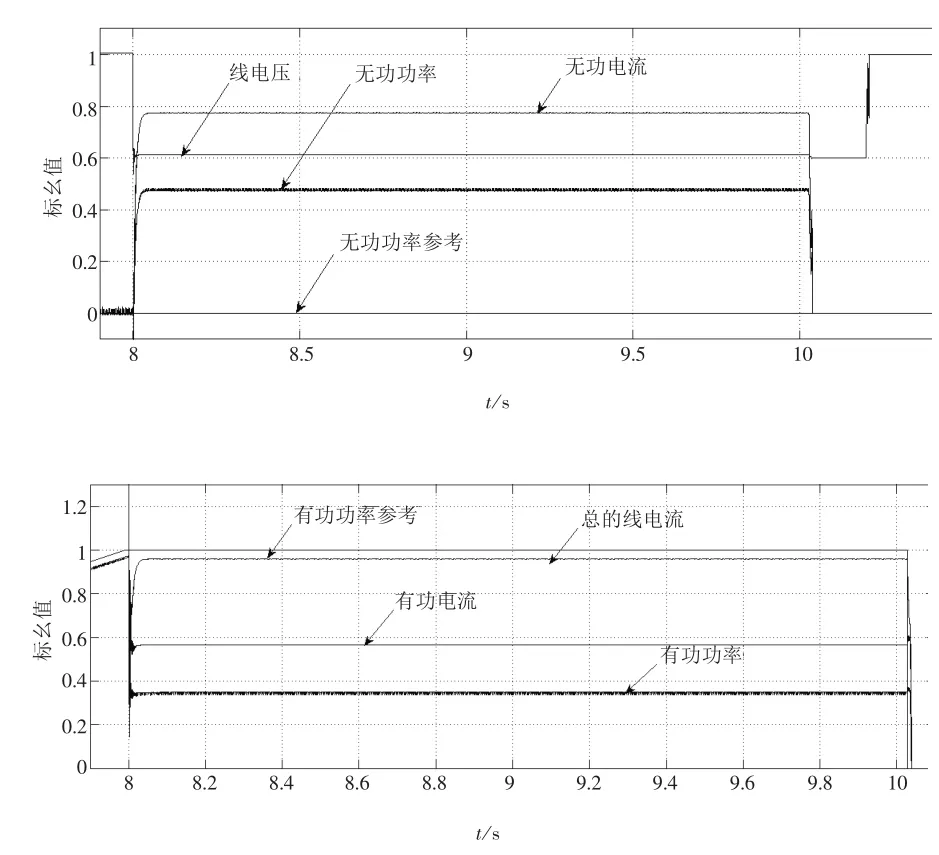
圖6 60%電壓跌落時的仿真波形
如圖6所示,電網電壓跌落到額定電壓的60%時,由于電流來不及驟變,變流器輸出的有功功率跌落至40%左右。無功參考值雖然為0,但為支持電網電壓,變流器調節功率因數,輸出無功功率到50%左右。有功電流從1降低到0.58,跌落期間變流器提供無功電流,無功電流從0升高到0.78,總的線電流為0.95。同時改變無功功率的設定值,變流器能迅速為系統發出無功功率,從而保持電壓跌落時的風機系統穩定運行。
5 結論
從仿真結果可以看出,在電網發生故障時變流器仍然能繼續運行,表明該控制策略的正確性和有效性。網側變流器能實現對輸出功率因數的調整,當電網出現故障時,能夠對電網穩定起到作用。高速永磁同步發電機風電系統具有低電壓穿越能力,尤其能滿足低電壓穿越期間的無功支持、故障后有功功率的迅速恢復。
[1]賀益康,何鳴明,趙仁德,等.雙饋風力發電機交流勵磁用變頻電源拓撲淺析[J].電力系統自動化,2006,30(4):105-112.
[2]李建林,許鴻雁,梁 亮,等.VSCF-DFIG在電壓瞬間跌落情況下的應對策略[J].電力系統自動化,2006,30(19):65-68.
[3]Abbey C,Li W,OwattaL,etal.Power Electronic Converter Control Techniques for Improved Low Voltage Ride through Performance in WT Gs[C].37th Power Electronic Specialists Conference.South Korea:PESC 06 IEEE,2006:1-6.
[4]胡書舉,李建林,許洪華.永磁直驅風電系統低電壓穿越特性分析[J].電力系統自動化,2007,31(17):73-77.
[5]張 興,張龍云,楊淑英,余 勇,曹仁賢.風力發電低電壓穿越技術綜述[J].電力系統及其自動化,2008,20(2):3.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年13期)2015-04-09 11:57:12
電測與儀表(2015年2期)2015-04-09 11:29:14
水電站機電技術(2014年6期)2014-09-26 12:07:48
水電站機電技術(2014年1期)2014-09-26 11:59:45