車聯網體系結構及感知層關鍵技術研究*
2012-06-27 05:59:38錢煥延
電信科學 2012年12期
關鍵詞:信息
王 群 ,錢煥延
(1.南京理工大學計算機科學與技術學院 南京 210094;2.江蘇警官學院公安科技系 南京210012)
1 引言
近年來,隨著汽車保有量的持續增長,道路承載容量在許多城市已達到飽和,交通安全、出行效率、環境保護等問題日益突出。在此大背景下,汽車聯網技術因其被期望具有大幅度緩解交通擁堵、提高運輸效率、提升現有道路交通能力等功能,而成為當前一個關注重點和熱點。歐洲、美國、日本等國家和地區較早進行了智能交通和車輛信息服務的研究與應用,2011年3月大唐電信科技產業集團與啟明信息技術股份有限公司攜手共建車聯網聯合實驗室,4月在重慶建立國內首個 “智能駕駛與車聯網實驗室”等,充分表明當前國內外對車聯網(internet of vehicles,IoV)研究的迫切性和廣泛性。
物聯網是一個以互聯網為主體,兼容各項信息技術,為社會不同領域提供可定制信息化服務的具有泛在化屬性的信息基礎平臺[1]。物聯網的概念和內涵隨著信息技術的發展和不同階段人們信息化需求的不斷演進,因其接入對象的廣泛性、運用技術的復雜性、服務內容的不確定性以及不同社會群體理解和追求上的差異性,很難用已有概念和標準來準確完整地給出權威定義。然而,車聯網概念的出現,因其服務對象和應用需求明確、運用技術和領域相對集中、實施和評價標準較為統一、社會應用和管理需求較為確定,引起了業界的普遍關注,已被認為是物聯網中最能夠率先突破應用領域的重要分支,并成為目前的研究重點和熱點。
源于物聯網的車聯網,以車輛為基本信息單元,以提高交通運輸效率、改善道路交通狀況、拓展信息交互方式,進而實現智能交通管理,使物聯網技術這一原本寬泛的概念在現代交通環境中得以具體體現。本文立足物聯網基礎理論和模型,以構建以信息技術為主導的智能交通系統為背景,對車聯網的基本概念、體系結構、通信架構及其關鍵技術進行研究。
2 車聯網概念
車聯網是智能交通系統(intelligent transportation system,ITS)與物聯網不期而遇后迅速交叉融合的產物。智能交通系統是傳統交通運輸管理方式發展到一定階段時的必然需求,而物聯網則是互聯網在發展過程中遇到瓶頸時在技術和應用上的突破。智能交通系統與物聯網走向融合具有明顯的信息時代烙印。
2.1 智能交通系統
智能交通系統是在較完善的現代交通基礎設施之上,通過運用先進的信息技術、通信技術、傳感技術、控制技術、計算機技術及系統集成技術等,加強對以車輛為主要對象的交通運輸管理,提高交通運輸系統的有序性和綜合管控能力,建立一個快速、實時、安全、環保、便捷和舒適的綜合交通運輸體系,從而最大限度地提升現有道路基礎設施的服務能力。
智能交通系統是1994年在全世界范圍內開始出現并被廣泛采納的一個概念,這一概念的內涵和外延也在隨著技術的發展以及交通運輸管理理念的變化而變化。例如,美國從20世紀80年代中期就開始了“智能化車輛道路系統”(intelligent vehicle highway system,IVHS)的研究,1994年IVHS改為ITS,以表明該研究從原來的“車—路”擴展到交通中的各個對象和環節。1998年,日本成立了“車輛信息通信 系 統 ”(vehicle information and communication system,VICS),該系統由先進的交通信息中心和車載信息終端組成,目前日本正在進行的新一代智能交通系統Smartway,其目的是構建一個“人—車—路”一體化的智能信息網絡。歐洲在1991年成立的 “歐洲道路交通通信技術應用促進組 織 ”(European road transport telematics implementation coordination organization,ERTICO)已成為推動ITS發展的一個聯盟,在第10屆ITS世界大會上,ERTICO提出了以車路通信與協同控制為研究重點的eSafety計劃,并得到了歐盟成員的一致推崇。我國從20世紀80年代開始研究信息技術在道路交通管理中的應用,已搭建了ITS體系結構,促進了智能交通系統從技術研究到應用示范的轉化。
2.2 車聯網的概念
物聯網到目前為止還沒有一個權威的定義,車聯網也是如此。本文基于對智能交通系統和物聯網已有研究成果的綜合分析,提出車聯網的基本概念,并進行相應的細節描述。車聯網即車輛物聯網,是以行駛中的車輛為信息感知對象,通過對智能傳感器、無線通信、分布式數據庫、信息處理與互聯網等技術的綜合應用,使人與車、車與車、車與道路基礎設施之間實現高效的信息交換與共享,從而對人、車、路和交通設施進行智能管控,進而改善道路交通狀況、提高出行效率、延伸信息化應用范圍的綜合信息服務與智能決策系統。車聯網的主體仍然是ITS,只是在ITS的基礎上融入了物聯網的基因,使車輛具有更豐富和完善的信息技術元素。車聯網是一種特殊的無線傳感器網絡,每一個高速行駛中的車輛節點有規律地分散在城市道路基礎設施所限制的范圍內,為車輛提供無所不在的網絡接入、安全控制、數字多媒體業務、導航、輔助駕駛等服務功能。
例如,作為系統終端的車輛,在ITS中主要通過線圈、地磁、微波、視頻、紅外、超聲波等檢測技術和GPS(global positioning system,全球定位系統)技術被動地接收和發送與交通相關的信息,缺乏按需獲取的信息交換和共享機制。在車聯網中,車輛具有了信息感知功能,可以通過RFID(radio frequency identification,射頻識別)、車載信息服務(telematics)、無線定位技術(wireless location technology,WLT)等一系列移動式交通信息采集技術,實時感知車輛自身以及車輛與周圍環境的信息,其中主要包括車況及控制系統感知、道路環境感知、車與物的感知、車輛位置感知以及智慧駕駛輔助系統等[2]。在車聯網中,車輛不僅提供位置信息,而且能夠實時接入城市交通信息網絡,隨時隨地獲取道路交通狀況,及時選擇最佳行車路線。由車載智能終端組成的移動無線自組織網絡實現了車輛之間的通信,車輛也可以通過移動IP技術接入互聯網,使行車中的人們共享互聯網信息。
3 車聯網系統架構
3.1 車聯網體系結構
作為物聯網的一個重要分支,車聯網遵循物聯網的體系結構,同樣也分為感知層、傳送層、應用層3層和安全能力、管理能力2種能力,如圖1所示。
(1)車聯網感知層
承擔車輛自身與道路交通信息的全面感知和采集,是車聯網的神經末梢,也是車聯網“一枝獨秀”于物聯網的最顯著部分。通過傳感器、RFID、車輛定位等技術,實時感知車況及控制系統、道路環境、車輛與車輛、車輛與人、車輛與道路基礎設施、車輛當前位置等信息,為車聯網應用提供全面、原始的終端信息服務。
(2)車聯網傳送層
通過制定專用的能夠協同異構網絡通信需要的網絡架構和協議模型,整合感知層的數據;通過向應用層屏蔽通信網絡的類型,為應用程序提供透明的信息傳輸服務;通過對云計算、虛擬化等技術的綜合應用,充分利用現有網絡資源,為上層應用提供強大的應用支撐。
(3)車聯網應用層
車聯網的各項應用必須在現有網絡體系和協議的基礎上,兼容未來可能的網絡拓展功能。應用需求是推動車聯網技術發展的源動力,車聯網在實現智能交通管理、車輛安全控制、交通事件預警等高端功能的同時,還應為車聯網用戶提供車輛信息查詢、信息訂閱、事件告知等各類服務功能。
(4)安全能力
車聯網的通信特點制約著車聯網信息的安全性和通信能力[3]。安全能力為車聯網提供密鑰管理和身份鑒別能力,確保入網車輛信息的真實性;提供信息的安全保護功能,保證數據在傳輸過程中不被破壞、篡改和丟棄;提供準確的位置信息,實現對車輛的定位和路徑回溯;提供精確的時鐘信息,保證車聯網實時業務尤其是安全應用在時間上的同步。
(5)管理能力
作為車聯網的控制中心,管理能力提供對入網車輛信息和路況信息的管理能力,實現車輛之間、車輛與道路基礎設施之間以及不同網絡之間的自由、無縫切換;實現車聯網通信的QoS管理,根據不同的入網車輛信息及業務類型,提供不同的網絡優先級服務。
3.2 車聯網通信架構
圖2所示的是車聯網通信架構,其中感知層網絡是一類特殊的移動無線傳感器網絡 (mobile wireless sensor network,MWSN),通過在車輛上安裝無線通信設備,將行駛中的車輛變成一個個移動無線網絡節點,實現車輛內部各設備(設施)之間、車輛之間以及車輛與道路基礎設施之間的高速移動互聯。根據組網方式和通信功能的不同,車聯網感知層網絡分為車域網(vehicle area network,VAN)和車載自組網(vehicular Ad Hoc network,VANET)兩種類型。

3.2.1 車域網
車域網即車載局域網,是使用有線或無線方式在車輛內部各設備(設施)之間構建的高度自治的局域網,并通過車載通信網關以無線方式接入周邊的公共接入網絡,實現車輛內部以及車輛與周邊設備之間的直接或間接通信。在VAN中,車內設備 (設施)之間可以利用CAN(controller area network,控制器局域網)總線、LIN(local interconnect network,本地互聯網絡)總線、藍牙等方式實現短距離互聯與通信。車輛定位模塊、車輛信息采集模塊、V2V(vehicle to vehicle,車輛與車輛)通信模塊、V2I(vehicle to infrastructure,車輛與基礎設施)通信模塊等需要與外界通信的功能模塊,通過車載通信網關并以WLAN、WiMAX、蜂窩通信網絡、通信衛星等方式接入被稱為 “路側單元”(road side unit,RSU)的道路基礎設施或公共接入網絡。車域網的應用,一方面通過信息技術實現了車內設備(設施)的智能集成,將車輛融入網絡中;另一方面使網絡應用延伸到車輛內部,實現了無線網絡邊緣的有效擴展。
車域網是一個有線與無線集成、信息采集與處理結合、車內通信與車外信息交換融合的復雜異構網絡系統,它是車載單元(on board unit,OBU)的重要組成部分,其主要功能如下。
·車輛定位模塊采用衛星接收機獲取車輛的實時位置信息,為車輛導航和定位管理提供服務。目前普遍使用的有美國的GPS,同時還有俄羅斯的GLONASS(格洛納斯系統)、歐洲的Galileo(伽利略)衛星導航系統和我國的北斗衛星導航系統。
·通過安裝在車輛的發動機、底盤、車身、電氣系統等部位的車用傳感器,實時采集車輛行駛過程中的車況信息,例如發動機的進氣量、冷卻液溫度、輪胎氣壓、車速、車輛行駛方向等。
·V2V通信模塊和V2I通信模塊分別負責車輛與車輛之間以及車輛與RSU之間的通信,實現 “人—車—路”之間的信息交換,確保行車安全。
·車輛所處環境的電磁干擾比較復雜。通過抗干擾模塊,可以解決車輛內部電子元器件之間以及車輛與外界之間存在的電磁干擾,在確保行車安全的同時提供行車中的舒適性。
車載單元中的另一個重要組成部分是電子車牌。電子車牌是對車輛身份的數字化標識,目前主要通過在車輛上嵌入主動式有源RFID標簽來實現。與傳統的車號牌相比,嵌入了RFID標簽的電子車牌不僅能夠提供與傳統車號牌相同的識別功能,還能夠提供車輛擁有者、車輛機械參數、車輛年檢情況、車輛環保標志等交通管理的輔助信息。
3.2.2 車載自組網
VANET 是基于 MANET(mobile Ad Hoc network,移動自組織網絡)[4]的一類專用于道路交通環境下的網絡形式。在VANET中,行駛中的車輛分別被虛擬成一個個移動網絡節點,位于道路邊的RSU被虛擬成網絡靜止節點,通過置于移動和靜止網絡節點的傳感器感知和采集交通及周圍環境狀況。VANET的網絡架構可以分為V2V和V2I兩部分,其中V2V也稱為IVC(inter-vehicle communication,車輛互聯通信)方式,可以使車輛實時監測道路上其他車輛的相關信息,并通過車載信息處理設備對信息進行綜合分析處理后,為行車安全及智能輔助駕駛提供信息服務。V2I也稱為RVC(roadside to vehicle communication,路側到車輛通信)方式,即建立OBU與RSU之間的通信,車輛通過分布在道路周邊的RSU,將收集到的信息匯集到交通控制中心,交通控制中心實現對交通狀況的實時監控,實現對全網范圍的交通管理,并通過RSU實現收費、定位、發布交通信息等功能。VANET的主要特點如下。
·車輛的高速移動性,決定了VANET中網絡拓撲的不穩定性。頻繁變化的拓撲結構,使得車輛節點之間路由的生存期大大縮短。為此,車聯網中的路由設計和算法實現要比其他類型的MANET復雜得多,傳統的基于網絡拓撲的路由協議在車聯網中將不適用。
·車輛的高速移動性以及受道路周邊建筑物和樹木的影響,導致車聯網的無線信道質量很不穩定。V2V之間以及V2I之間距離的頻繁快速變化,產生了嚴重的多普勒頻移效應。例如,當車輛快速經過RSU時,多普勒頻移的極性在很短時間內發生反轉,從而使前后信號的處理結果間出現較大的誤差。
·雖然車輛的高速移動性使車聯網變得非常復雜,但與其他MANET相比,受城市道路的約束,車輛節點的移動具有一定的規律性,車輛的行駛軌跡具有可預測性。同時,由于車輛本身提供了較為充足的電力和空間資源,從而對通信設備、傳感器、定位設備及其他信息采集處理設備的能耗及集成度要求相對較低。
4 車聯網標準化研究現狀
隨著汽車工業的迅猛發展,道路擁擠和交通事故頻發已成為一個全球性的問題,為此,車聯網概念一經提出便得到了全社會的普遍關注。在全球許多科研機構、相關組織及汽車制造商進行大量理論研究和實踐創新的同時,標準化工作也取得了一定的進展。目前,最具影響的車聯網標準主要有專用短距離通信(dedicated short range communication,DSRC)、IEEE 802.11p 標 準 和 IEEE 1609協議棧。
4.1 DSRC
DSRC是一種專用于車聯網環境中V2V和V2I之間建立信息雙向傳輸的無線通信機制,具有傳輸速率高、時延小、支持點對點和點對多點通信等功能。以V2I通信為例,DSRC建立了置于車輛上的OBU與道路周邊RSU之間的通信接口規范。在該規范中,通信鏈路分為上行鏈路和下行鏈路兩部分,其中從RSU到OBU之間的通信稱為下行鏈路,主要實現OBU從RSU中讀取信息以及RSU向OBU寫入信息的功能,如電子不停車收費 (electronic toll collection,ETC)系統中的收費記錄和余額寫入等。從OBU到RSU之間的通信形成上行鏈路,主要完成RSU從OBU讀取信息,實現車輛的自動識別功能等。
1992年,美國材料與試驗協會 (American society for testing and materials,ASTM)針對 ETC應用提出了 DSRC技術,采用915 MHz頻段,通信范圍達到30 m,數據傳輸速率為0.5 Mbit/s。之后,在全球范圍內主要形成了歐洲、美國和日本3大標準體系。2002年和2003年,ASTM分別發布了E2213-02和E2203-03兩個DSRC標準,將工作頻段設置為5.9 GHz,通信范圍擴展到了1 000 m,數據傳輸速率提升到了6~27 Mbit/s。歐洲于1994年由CEN/TC278工作組開始DSRC標準的起草,1997發布了ENV12253“5.8 GHz DSRC物理層”和ENV12795“DSRC數據鏈路層”兩個標準。1997年日本TC204工作小組完成了DSRC標準起草工作,并于2001年和2004年分別發布了ARIB STD-T75和ARIB STD-T88兩個標準,使用的是700 MHz頻段。需要說明的是,DSRC迄今為止還沒有形成統一的國際標準。
4.2 IEEE 802.11p標準和IEEE 1609協議棧
為了加快DSRC的標準化進程,促進產業化發展。2004年IEEE成立了車輛通信環境下的無線接入(wireless access in the vehicular environment,WAVE)工作組,具體負責在現有5.9 GHz頻段DSRC的基礎上針對車聯網中V2V和V2I對高數據速率和高速移動性的通信要求,設計一個全球范圍內通用的標準,該標準即為于2010年7月正式發布的IEEE 802.11p標準。IEEE 802.11無線局域網(WLAN)標準存在信號覆蓋范圍小、服務質量(quality of service,QoS)支持能力弱、無法對多媒體信息提供高質量的支持、難以適應車輛高速行駛過程中信道的頻繁切換等缺點,所以IEEE 802.11標準無法直接應用到車聯網。IEEE 802.11p通過對IEEE 802.11標準的擴展和補充來適應車聯網V2V和V2I的通信要求,如先進的信息傳輸機制、高速移動互聯、增強的安全性和身份認證等[5,6]。
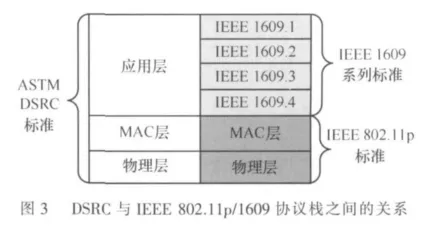
由于DSRC和IEEE 802.11標準在體系結構上的非對稱性,IEEE 802.11p標準主要規定了DSRC協議的物理層(PHY)和介質訪問控制層(MAC)標準[7],DSRC 協議中的上層功能由IEEE 1609協議棧實現,協議對應結構如圖3所示。
IEEE 1609協議棧由IEEE汽車技術學會智能運輸系統委員會發起,是以IEEE 802.11p通信協議為基礎的高層系列標準,其主要目的是制定一個車聯網中V2V和V2I通信的標準規范,該規范提供了自動收費、資源管理、安全服務等服務標準。表1列出了現有的IEEE 1609系列標準的功能描述。
5 車聯網關鍵技術
5.1 物理層
與其他無線通信方式相比,車聯網的物理層相對復雜。當車輛行駛在城市道路環境中時,無線信號在傳播過程中因受城市建筑物等復雜環境的影響,承載相同信息但經過多個不同路徑到達接收機的信號通過矢量疊加后合成時變信號,從而產生多徑衰落現象。多徑衰落會嚴重影響V2V和V2I通信質量。當車輛在高速公路上行駛時所引起的信道時變以及多普勒頻移現象,將引起無線信道的突變,使接收機的誤差增大,所以當一些傳統的相對穩定的無線通信方式應用到車聯網環境時將會引起許多問題。為此,研究支持高速移動性、具備多跳連接、提供安全可靠的信息交互方式、確保通信實時性的適應車聯網特定環境的物理層規范是車聯網中一個重要的研究方向。
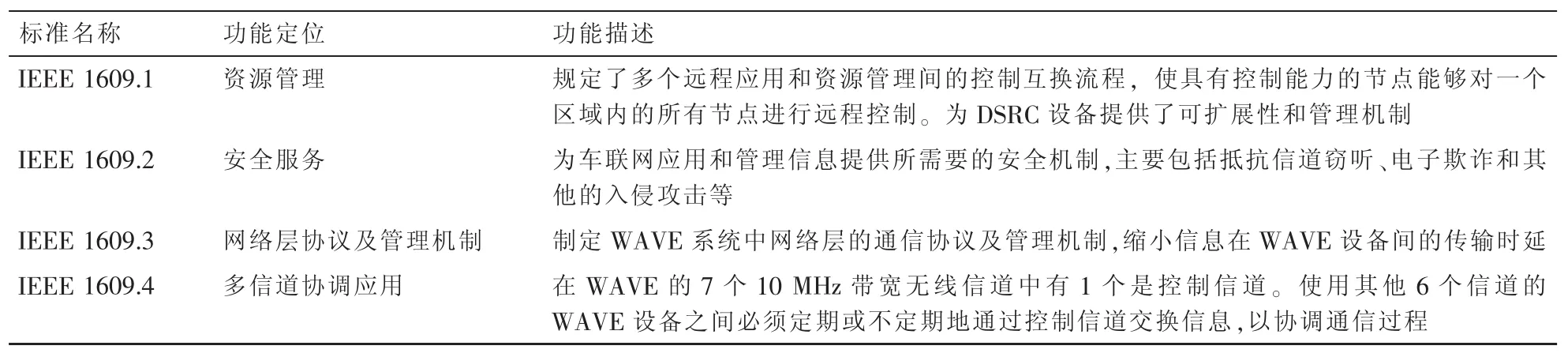
表1 IEEE 1609系列標準功能描述
IEEE 802.11p是目前專門針對車聯網物理層推出的通用標準。IEEE 802.11p物理層使用IEEE 802.11a中確定的正交頻分復用(OFDM)技術,以降低多徑衰落和多普勒頻移帶來的碼間干擾。IEEE 802.11p對IEEE 802.11a進行了修改,通過在物理層上擴大數據幀的保護間隔,以便能夠容納更大的均方根時延(RMS),進而支持更高速率的移動性,以滿足車聯網物理層通信要求。表2是IEEE 802.11a與IEEE 802.11p物理層參數對比[5]。
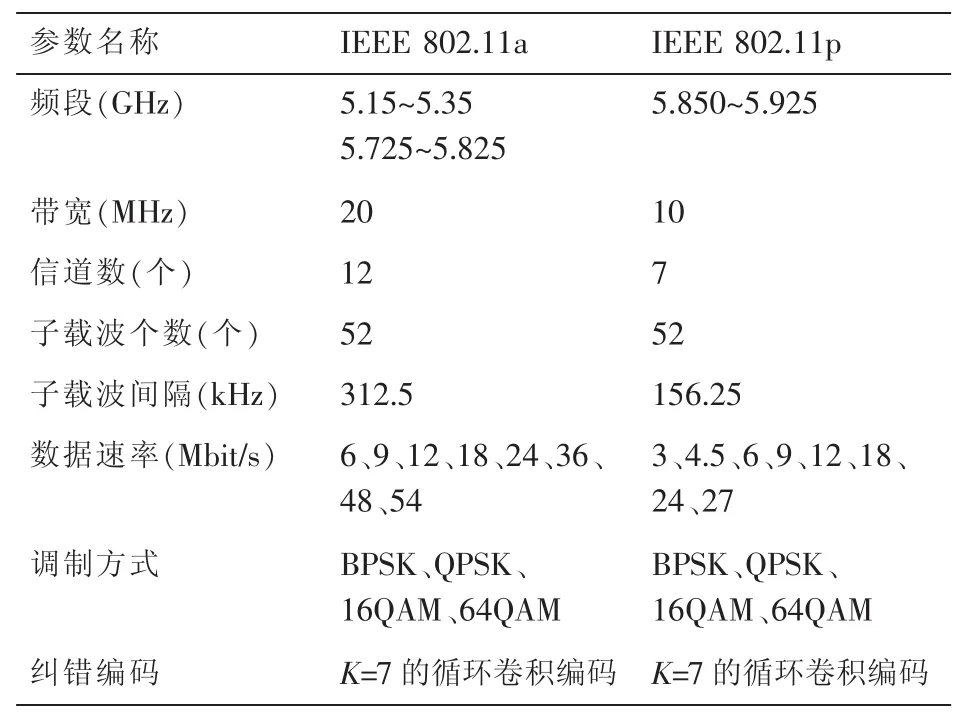
表2 IEEE 802.11a與IEEE 802.11p物理層參數對比
IEEE 802.11p物理層采用5.850~5.925 GHz頻段,共75 MHz的頻段資源被劃分為7個子信道,其中1個控制信道(CCH)負責安全消息的傳輸,另6個服務信道(SCH)負責非安全服務消息的傳輸,每個信道的帶寬為10 MHz,頻譜分配如圖4所示。由于安全和非安全消息在車聯網中共存,為了確保車聯網的安全性,必須讓服務信道能夠隨時接收到控制信道的消息,隨時接受服務管理。

5.2 介質訪問控制層
傳統無線網絡的介質訪問控制(MAC)層所面臨的隱藏和暴露終端與資源分配等問題在車聯網中同樣存在,而且所產生的后果更加嚴重。與傳統無線通信網絡相比,車聯網的MAC層必須具備:支持高速移動性、通信的實時性和可靠性、較高的帶寬利用率、采用分布式自組網方式、通信機會公平、提供高效且及時的廣播機制等特征[8,9]。在傳統無線網絡中應用的MAC層協議主要有CSMA/CA(carrier sense multiple access with collision avoidance)、ALOHA和令牌環,目前針對車聯網V2V和V2I通信的MAC層協議也基本上是對已有協議的改進,如Ad Hoc MAC 協議[10]、D-MAC(directional MAC)協議[11]、CMV(cognitive MAC for VANET)協 議[12]、A-ADHOC MAC 協 議[13]、RRALOHA (reliable reservation-ALOHA)[14]和 Secure VANET MAC協議[15]等。IEEE 802.11p MAC層協議的基礎仍然是IEEE 802.11的CSMA/CA,為了適應車聯網的特殊應用需求,在管理實體、接入優先級和介質訪問控制方式等方面進行了相應的改進[16]。
(1)IEEE 802.11p MAC 層管理實體
在IEEE 802.11中設計了相對獨立的物理層管理實體(PLME)和MAC層管理實體(MLME),不同服務實體之間的操作通過服務訪問點 (SAP)實現。IEEE 802.11p在MLME中定義了一個名為“dot11ocb”的管理信息庫(MIB),在車聯網管理中,當需要向IEEE 802.11p設備添加額外的“選項/約束”條件時可將“dot11ocb”設置為“enabled”狀態,然后根據管理需要進行配置。其中,“選項/約束”主要包括“認證/無認證服務”和“數據保密”兩種類型。
(2)接入優先級
IEEE 802.11p標準采用了IEEE 802.11e中的EDCA(enhanced distributed channel access,增強的分布式信道訪問)機制來解決車聯網應用中的優先級問題,讓安全預警、輔助駕駛等緊急消息可以被賦予高優先級,使其優先使用信道,而交通信息、普通IP業務等實時性要求不高的消息可以設置較低的優先級,讓其緩存后發送。EDCA機制滿足了車聯網應用的QoS管理要求。
(3)介質訪問控制方式
以太網中采用的CSMA/CD無法區分優先級,不存在可靠性保障。IEEE 802.11中采用的CSMA/CA雖然提高了傳輸的可靠性,但時延過大,無法滿足車聯網實時通信要求。針對這一問題,IEEE 802.11p采用了OFDMA-CSMA機制,通過對每一個子載波組分配單獨的CSMA來實現低時延和高可靠性。
5.3 路由協議
車聯網環境中車輛的快速移動和車流分布信息的動態變換都會導致通信鏈路的頻繁變化,從而使建立路由源節點(發送信息的車輛)到目的節點(接收信息的車輛)的通信鏈路變得非常復雜,剛剛建立的信息傳輸路徑稍縱即逝。因此,必須在借鑒傳統Ad Hoc網絡中多跳路由已有研究成果的基礎上,設計開發適合車聯網環境的路由協議。根據目前的研究成果,適用于車聯網中的路由協議主要分為以下3種類型。
5.3.1 按需路由協議
根據路由發現策略的不同,可將路由協議分為先應式路由協議和按需路由協議兩種類型。先應式路由協議也稱為表驅動路由協議,網絡中的每個路由節點通過周期性地發送“Hello”廣播報文來告知和探測鄰居節點,從而在每個路由節點上形成并維護一張反映全網拓撲信息的路由表。當網絡中的某一節點發生變化時,根據不同的路由算法或策略,網絡中的其他節點將會接收到這一事件信息并重新計算和更新自己的路由表,以便及時維護正確的路由信息。當網絡規模較大時每個路由節點需要維護的路由信息量將很大,當網絡拓撲頻繁變化時大量的廣播報文會占用過多的網絡帶寬資源,使得路由協議的效率快速下降。
按需路由協議也稱為被動型路由協議或反應式路由協議,它是根據數據的發送要求,被動地搜索從源節點到目的節點的最佳路由,而在數據發送結束或沒有數據發送時,節點并不需要維護路由表。按需路由協議是Ad Hoc網絡特殊的路由協議類型,它可以降低系統開銷,提高網絡吞吐量。但是,按需路由協議具有許多潛在的不確定性,進而影響協議的可靠性和應用的安全性。例如,從源節點到目的節點之間能否建立路由、建立路由需要多長時間都無法確定,這種不確定性為車聯網應用帶來了安全隱患。
為此,反應式路由協議不適合于車聯網應用,而按需路由協議也僅僅適應于規模不大、節點移動速率較小、安全性要求不高的車聯網環境。
5.3.2 分層路由協議
根據所形成網絡結構的不同,可將路由協議分為平面路由協議和分層路由協議兩種類型[17,18]。在平面結構中,所有節點在網絡中的地位是平等的,不存在層次上的差異性,一般不存在瓶頸問題,具有較強的頑健性。而分層結構中采用簇的機制對節點進行分層管理,將在地域范圍內相鄰的節點組成一個簇,每個簇有一個簇首,簇與簇之間借助于各自的網關節點進行通信,由簇首和網關構成了高層的虛擬骨干網。典型的分層路由協議有CBRP(cluster based routing protocol)[19]、CL-DSR (reliable dynamic source routing based cluster label)[20]和AOW(automatic on demand weighted clustering algorithm)[21]。
分層路由協議具有較強的可擴展性,適應于大規模的網絡環境,可較好地實現對移動節點的管理。所以分層路由協議較適用于車聯網環境。
5.3.3 地理位置輔助路由協議
根據是否使用地理位置信息作為路由發現和維護的依據,可將路由協議分為地理位置輔助路由協議和非地理位置輔助路由協議兩種類型。非地理位置輔助路由協議需要管理路由表或存儲路徑,需要獲知并建立節點之間的路徑信息,是傳統網絡中普遍使用的路由協議類型。隨著GPS等定位技術的應用和道路通信基礎設施的不斷完善,地理位置輔助路由協議成為車聯網中研究的一個重點。根據所采用的地理位置信息的不同,地理位置輔助路由協議主要分為以下兩種類型。
(1)貪婪路由
貪婪算法(greedy algorithm)是一種解決最優化問題的近似方法。貪婪算法的實現分為不同的階段,每一階段根據相應的貪婪準則(greedy criterion)會得到一個解決本階段問題的最優解,最后將各階段的最優解依次關聯起來便得到整個過程的最優解。2000年,哈佛大學的Brad Karp等人提出了 GPSR(greedy perimeter stateless routing)[21]協議,成功地將貪婪算法與地理位置信息有機結合起來,應用到車聯網感知層網絡的路由協議中。貪婪路由的思想是:節點周期性地廣播包含自身身份標識和當前實時地理位置坐標的報文,通過對接收到的廣播報文的綜合分析和參數設置,每個節點便可以建立鄰居節點列表。當一個節點要發送數據時,首先查找自己的鄰居節點列表來發現到達目的節點所有路徑中最近的一個直聯相鄰節點,然后將數據發送給該節點,接收到數據的節點采取同樣的方法繼續選擇下一個直聯鄰居節點,直到數據到達目的節點為止。由于省略了路由選擇的復雜窮舉過程,所以貪婪路由的效率較高。
(2)錨路由
雖然城市道路周邊復雜的環境對信號傳輸產生的影響較大,但城市道路交通網絡的分布具有規律性和存在時間上的相對穩定性,為此將道路交通拓撲信息引入路由選擇成為車聯網的一個研究方向。2003年由Christian Lochert等人提出的 GSR(geographic source routing)[22]協議成為地理位置輔助路由協議的一個典型案例。在GSR協議中,由從源節點到目的節點間的道路十字路口組成錨節點序列,然后將GPSR協議中原來從計算直聯鄰居節點和目的節點之間的距離,改為計算直聯鄰居節點和距離目的節點較近的下一個錨節點之間的距離,再將距離下一個錨節點較近的鄰居節點作為路由的下一跳。在GSR協議中,兩個錨節點之間仍然通過貪婪算法確定路由。通過這種方法,信息將沿著道路拓撲傳輸,降低了城市道路環境對車聯網通信質量的影響。
在前人研究的基礎上,如何將道路范圍內的車流密度、車輛的運行速度和方向等參數以及道路周邊的通信基礎設施引入路由實現過程成為一個新的研究熱點。例如,2008年由 Kevin C Lee等人提出的 LOUVER(landmark overlay for urban vehicular routing environments)[24]協議在 繼承了GPSR協議貪婪路由算法的基礎上,引入車輛自主感知車輛密度的方法來輔助路由選擇,為車聯網路由協議的設計開發提出了一種新的思路。
6 結束語
近年來,車輛的迅猛增長與人們無處不在的信息通信要求將原本互不相干的通信網絡與汽車緊密結合起來,從而促進了車輛向網絡化、智能化方向發展。目前,車聯網在國內外還處于起步階段,真正具有“智慧”功能的車聯網應用僅存在于實驗環境或小范圍內,即使是智能交通管理、ETC、車輛信息采集、車輛測速等具有車聯網基本要素的應用也限于一個城市或城市的某一特定范圍。現有的研究和應用,距離真正實現車聯網中最重要的V2V和V2I通信管理還存在很大的差距,基于傳統理論與技術的研究和設計開發方法難以有效解決車聯網系統的核心問題。為此,立足車聯網的泛在化屬性,打破常規的方法和模式,通過創建系統、科學的理論模型,探索規范有效的理論和方法體系,是實現車聯網應用的基礎和必由之路,也是研究人員的努力方向。
1 王群,錢煥延.物聯網的技術路線及屬性形成.電信科學,2012,28(7):86~93
2 《貨運車輛》研究部,華夏物聯網研究中心.中國貨運車聯網技術與產業發展報告.貨運車輛,2012(1):7~103
3 Du Wenliang,Deng Jing,Huan Y S,et al.A pair wise key predistribution scheme for wireless sensor networks.Proceedings of the 10th ACM Computer and Communications Security(CCS’03),Washington,DC,USA,October 2003
4 Corson J,Macker J.Mobile Ad Hoc Networking(MANET):Routing Protocol Performance Issues and Evaluation Considerations.RFC 2501,January 1999
5 ASTM E2213-03.Standard Specification for Telecommunications and Information Exchange between Roadside and Vehicle Systems-5 GHz Band Dedicated Short Range Communication(DSRC)Medium Access Control (MAC)and Physical Layer(PHY)Specifications,2003
6 Xiang W,Richardson P,Guo J.Performance evaluation of wireless access in vehicular environments (WAVE)systems for dedicated short range communications (DSRC).IEEE Wireless Communication Magazine,2009(12)
7 Cherif M O,Senouci S M,Ducourthial B.Vehicular network selforganizing architectures.Proceeding ofthe5th IEEE GCC Conference&Exhibition,Kuwait City,March 2009
8 常促宇,向勇,史美林.車載自組網的現狀與發展.通信學報,2007,28(11):116~126
9 羅濤,王昊.車輛無線通信網絡及其應用.中興通訊,2011,17(3):1~7
10 Borgonovo F.Ad Hoc MAC:a new MAC architecture for Ad Hoc networksproviding efficientand reliable point-to-pointand broadcast services.Wireless Networks,2004(7)
11 Ko Y B.Medium access control protocols using directional antennas in Ad Hoc networks.Proceedings of IEEE INFOCOM,Tel Aviv,Israel,March 2000
12 Seung-eun Chung,Joon Yoo,Chong-kwon Kim.A cognitive MAC for vanet based on the wave systems.Advanced Communication Technology,2009(1):41~46
13 Liu J,Ren F Y,Miao L M,et al.A-ADHOC:an adaptive realtime distributed MAC protocol for vehicular Ad Hoc networks.Mobile Networks and Applications,2011,16(5):576~585
14 Borgonovo F,Capone A,Cesana M.RR-ALOHA:a reliable R-ALOHA broadcast channel for Ad Hoc inter-vehicle communication networks.Proceedings of Med-Hoc-Net,Sardegna,Italy,July 2002
15 Qian Y,Lu K J,Nader M.A secure VANET MAC protocol for DSRC applications. Proceedings of IEEE Globecom,New Orleans,LA,USA,December 2008
16 IEEESTD.2010.5514475.IEEE Standard for Information Technology-Telecommunications and Information Exchange between Systems-Local and Metropolitan Area Networks-Specific Requirements Part 11:Wireless LAN Medium Access Control (MAC)and Physical Layer (PHY)Specifications Amendment 6:Wireless Access in Vehicular Environments,July 2010
17 Wahid N,Luiz A S,Denis T.Adaptive approaches for efficient parallel algorithms on cluster-based systems. International Journal of Grid and Utility Computing,2009,1(2):98~108
18 胡淼,李劍峰.車輛自組織網絡中基于貪婪算法的地理位置路由.中興通訊,2011,17(3):24~28
19 Yu T Y,Chong P H J, Zhang M.Performance of efficient CBRP in mobile AdHoc networks (MANETS). Proceedingsof Vehicular Technology Conference, Calgary, Alberta, Canada,September 2008
20 Lu X B, Zhou L Y.A reliable dynamic source routing based clusterlabelin mobile Ad Hoc networks.Proceedingsof Vehicular Technology Conference,Barcelona,Spain,April 2009
21 Chatterjee M,Sas S K,TurgutD.An on-demand weighted clustering algorithm(WCA)for Ad Hoc networks.Proceedings of Global Telecommunications Conference,GLOBECOM'00,San Francisco,USA,November 2000
22 Brad K,Kung H T.GPSR:Greedy perimeter stateless routing for wireless networks.Proceedings of the 6th Annual International Conference Mobile Computing and Networking(MOBICOM’00),Boston,MA,USA,August 2000
23 Christian L,Hannes H,Jing T, et al.A routing strategy for vehicular Ad Hoc networks in city environments.Proceedings of the IEEE Intelligent Vehicles Symposium(IVS’03),Columbus,OH,USA,June 2003
24 Kevin C L,Michael L,Jérǒme H,et al.LOUVER:landmark overlays for urban vehicular routing environments.Proceedings of the 68th Vehicular Technology Conference(VTC-Fall'08),Calgary,Canada,September 2008
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32