基于分組策略的RFID自適應(yīng)防碰撞算法的研究
2012-06-29 01:37:20楊江波
電視技術(shù) 2012年23期
關(guān)鍵詞:策略
李 云,謝 剛,鄭 重,楊江波
(太原理工大學(xué)信息工程學(xué)院,山西 太原 030024)
責(zé)任編輯:薛 京
射頻識(shí)別(Radio Frequency Identification,RFID)系統(tǒng)運(yùn)行時(shí),當(dāng)讀寫器作用區(qū)域內(nèi)多個(gè)標(biāo)簽同時(shí)向讀寫器發(fā)送信號(hào),會(huì)產(chǎn)生信號(hào)相互干擾的現(xiàn)象,這種現(xiàn)象稱為標(biāo)簽的碰撞,而解決此類碰撞的算法則稱為標(biāo)簽防碰撞算法。目前,現(xiàn)有的時(shí)分多路(TDMA)標(biāo)簽防碰撞算法可以分為基于ALOHA機(jī)制的隨機(jī)性算法和基于二進(jìn)制樹的確定性算法兩種類型[1]。基于ALOHA機(jī)制的算法操作簡單、易于實(shí)現(xiàn),但當(dāng)標(biāo)簽數(shù)目較大時(shí),部分標(biāo)簽可能會(huì)在相當(dāng)長的一段時(shí)間內(nèi)得不到識(shí)別,出現(xiàn)“餓死”現(xiàn)象[2]。目前研究較多的是幀時(shí)隙ALOHA算法[3-4],主要是通過估計(jì)標(biāo)簽數(shù)量來確定幀長從而減少碰撞,但仍未解決標(biāo)簽“餓死”問題。基于二進(jìn)制樹的算法[5-9]識(shí)別率高,避免了標(biāo)簽“餓死”現(xiàn)象,適應(yīng)標(biāo)簽數(shù)目較大的場(chǎng)合,但通信量大,且有相當(dāng)長的延時(shí)。文獻(xiàn)[5-6]通過后退策略降低了通信量,但是碰撞時(shí)隙較多,仍有相當(dāng)長的延時(shí)。文獻(xiàn)[7]是通過啟發(fā)式函數(shù)h(x)的大小來估計(jì)節(jié)點(diǎn)內(nèi)待識(shí)別的標(biāo)簽數(shù)量,由于每次搜索都要計(jì)算h(x),雖然減少了搜索次數(shù),但通信量仍然很大。文獻(xiàn)[8]規(guī)定只有1位碰撞位時(shí)直接識(shí)別2個(gè)標(biāo)簽,文獻(xiàn)[9]規(guī)定只有2位碰撞位時(shí)直接識(shí)別,兩種改進(jìn)都減少了搜索次數(shù),但當(dāng)標(biāo)簽較少時(shí)出現(xiàn)符合規(guī)定的概率較小。
本文針對(duì)以上算法存在的不足,提出了一種新的基于分組策略的RFID自適應(yīng)防碰撞算法(AGS),該算法在二叉樹搜索算法的基礎(chǔ)上引入分組策略、后退策略和自適應(yīng)地選擇四叉樹搜索策略,大幅度地降低了讀寫器的搜索次數(shù),減少了標(biāo)簽與讀寫器間的通信量與延時(shí),提高了識(shí)別效率。
1 AGS算法原理
根據(jù)標(biāo)簽內(nèi)部的計(jì)數(shù)器R的值將標(biāo)簽分為兩組:A組(R=0)標(biāo)簽ID中“1”的個(gè)數(shù)為偶數(shù);B組(R=1)標(biāo)簽ID中“1”的個(gè)數(shù)為奇數(shù)。讀寫器首先對(duì)A組標(biāo)簽發(fā)出搜索命令,符合條件的標(biāo)簽將自身的ID值傳送給讀寫器,讀寫器根據(jù)曼切斯特解碼檢測(cè)本次響應(yīng)標(biāo)簽的碰撞情況。若無碰撞,直接識(shí)別,讀寫器再對(duì)B組標(biāo)簽發(fā)出搜索命令;若有碰撞,則根據(jù)連續(xù)碰撞位的信息將該組標(biāo)簽分為不同的子集,即如果檢測(cè)到有3位連續(xù)的比特位發(fā)生碰撞,則立刻停止對(duì)ID進(jìn)行編解碼,將該組標(biāo)簽分為“00”,“01”,“10”,“11”共4 個(gè)子集,并將已識(shí)別的比特位壓棧;如果檢測(cè)到3個(gè)非連續(xù)的比特位發(fā)生碰撞,則根據(jù)最高碰撞位的位置將該組標(biāo)簽分為“0”,“1”共2個(gè)子集。讀寫器繼續(xù)發(fā)出命令,直到標(biāo)簽信息不再發(fā)生碰撞,標(biāo)簽被成功識(shí)別,讀寫器采用后退策略,繼續(xù)發(fā)出前一條搜索命令,直到該組標(biāo)簽全部識(shí)別成功。具體算法流程如圖1所示。
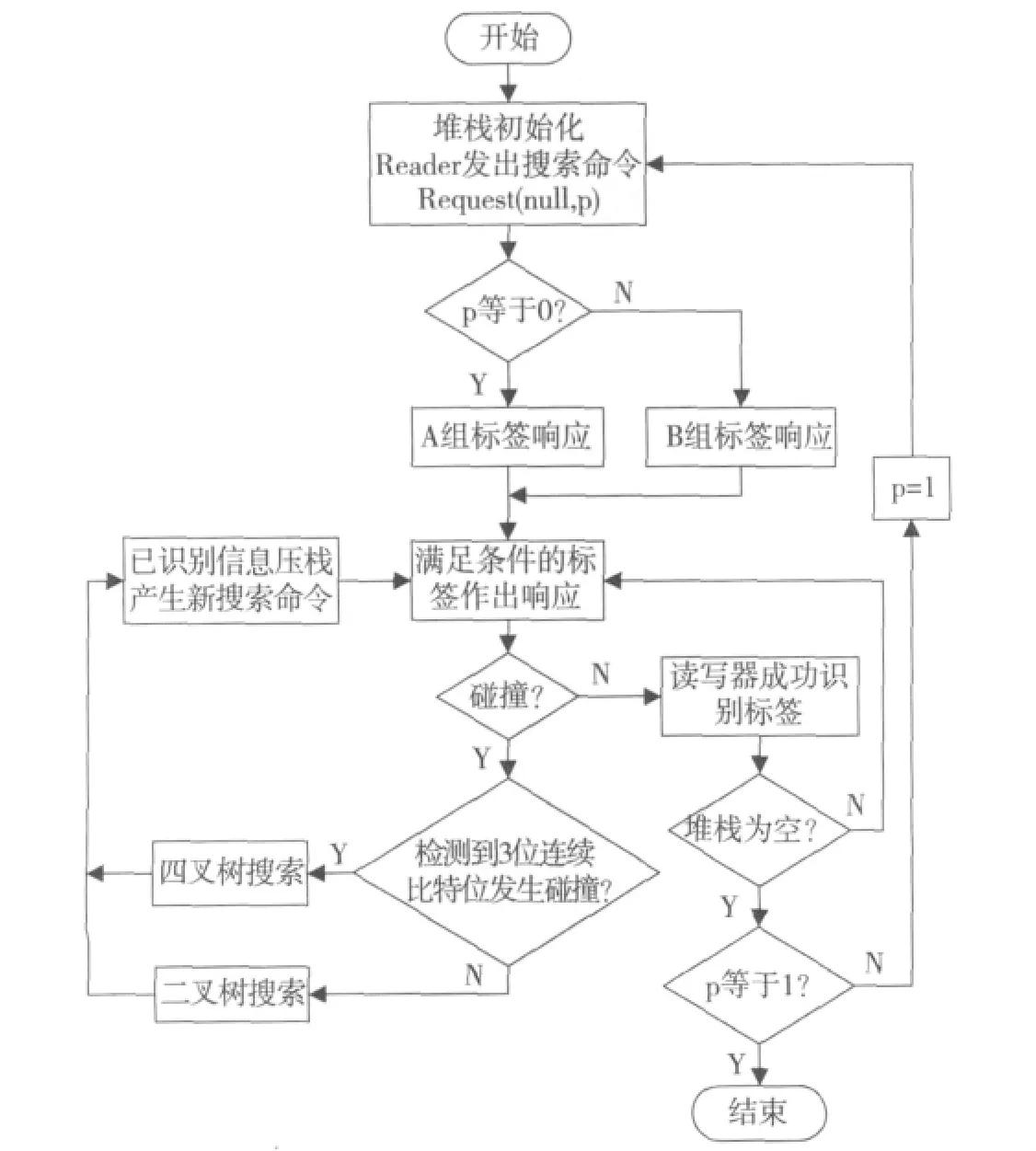
圖1 AGS算法流程圖
2 算法協(xié)議
為便于實(shí)現(xiàn)和描述該算法,提出如下算法協(xié)議對(duì)算法進(jìn)行約束。
1)請(qǐng)求命令Request。命令有3種形式:Request(null,p),Request(x,q)和 Request(x,y,q)。
Request(null,p)中p為0或1,讀寫器第一次搜索時(shí)發(fā)送,要求讀寫器作用區(qū)域內(nèi)所有計(jì)數(shù)器R的值與p的值相同的標(biāo)簽響應(yīng);Request(x,q)中x為0或1,q為上一次搜索過程檢測(cè)到的最高碰撞位;Request(x,y,q)中x,y分別為0或1,q為最高碰撞位,當(dāng)上一次搜索過程檢測(cè)到連續(xù)的3位碰撞位時(shí)使用此命令。
2)如果讀寫器檢測(cè)到只有2個(gè)比特位發(fā)生碰撞時(shí),讀寫器直接識(shí)別這2個(gè)標(biāo)簽。
3)當(dāng)讀寫器檢測(cè)到有3個(gè)比特位發(fā)生碰撞時(shí),則立刻停止對(duì)ID進(jìn)行編解碼。
4)根據(jù)檢測(cè)最高碰撞位連續(xù)個(gè)數(shù)自適應(yīng)地確定搜索樹的分叉數(shù),即在某分支下檢測(cè)出最高碰撞位連續(xù)的個(gè)數(shù)大于等于3時(shí),則選擇四叉樹搜索,否則選擇二叉樹搜索。
3 算法步驟
假設(shè)讀寫器作用區(qū)域內(nèi)有8個(gè)標(biāo)簽,各個(gè)標(biāo)簽的編碼及其識(shí)別過程如圖2所示。

圖2 算法的搜索識(shí)別過程
1)讀寫器發(fā)送命令Request(null,0),讀寫器作用區(qū)域內(nèi)計(jì)數(shù)器R=0的所有標(biāo)簽均作出響應(yīng)。本例中,D7D6D5均發(fā)生碰撞,則q=7。
2)讀寫器發(fā)送命令Request(0,0,7),即選擇D7D6為“00”的待命態(tài)標(biāo)簽,只有Tag4滿足條件,不存在沖突問題而直接識(shí)別。
3) 讀寫器發(fā)送命令 Request(0,1,7),Tag3,Tag5 滿足條件并作出響應(yīng)。此時(shí),讀寫器解碼得:1000??,只有2位碰撞位,由算法協(xié)議2)可知:讀寫器不必發(fā)送請(qǐng)求命令而直接識(shí)別 Tag3,Tag5。
4) 讀寫器發(fā)送命令 Request(1,0,7),Tag1,Tag6,Tag7滿足條件并作出響應(yīng)。此時(shí)讀寫器解碼得:1?0??,最高碰撞位為D4。
5) 讀寫器發(fā)送命令Request(0,4),Tag6,Tag7 滿足條件,并作出響應(yīng)。此時(shí),讀寫器解碼得:000??,只有2位碰撞位,從而直接識(shí)別Tag6,Tag7。
6)讀寫器發(fā)送命令Request(1,4),此時(shí)只有Tag1滿足條件,不存在沖突問題直接識(shí)別。
7)讀寫器發(fā)送命令Request(1,1,7),此時(shí)只有Tag2滿足條件,直接識(shí)別。
8)讀寫器發(fā)送命令Request(null,1),讀寫器作用區(qū)域內(nèi)計(jì)數(shù)器R=1的所有標(biāo)簽均作出響應(yīng),此時(shí)只有Tag8滿足條件,不存在沖突問題而直接識(shí)別。
4 算法仿真分析
設(shè)讀寫器作用區(qū)域內(nèi)存在N個(gè)標(biāo)簽,標(biāo)簽ID為n位,由標(biāo)簽計(jì)數(shù)器R的值將N個(gè)標(biāo)簽分為兩組:R值為0的標(biāo)簽個(gè)數(shù)為N1個(gè);R值為1的標(biāo)簽個(gè)數(shù)為N2個(gè)。讀寫器識(shí)別兩組標(biāo)簽的過程中,檢測(cè)到只有2個(gè)碰撞位的情況分別為M1,M2次,使用四叉樹時(shí)出現(xiàn)如圖3a的情況分別為 P1,P2次,出現(xiàn)如圖3c的情況分別為Q1,Q2次。

圖3 四叉樹代替二叉樹可能出現(xiàn)的3種情況
策略1:后退策略
基于后退策略的二進(jìn)制搜索算法識(shí)別N個(gè)標(biāo)簽所需搜索次數(shù)為

策略2:自適應(yīng)策略
出現(xiàn)連續(xù)3位碰撞位時(shí),采用四叉樹代替二叉樹有如圖3所示的3種情況。假如讀寫器作用區(qū)域內(nèi)存在00011101和00000001兩個(gè)標(biāo)簽時(shí),產(chǎn)生如圖3a所示的情況,此時(shí)采用四叉樹比二叉樹增加了2次搜索;假如讀寫器作用區(qū)域內(nèi)存在00011101,00000001和00001001這3個(gè)標(biāo)簽時(shí),產(chǎn)生如圖3b所示左邊的情況,此時(shí)采用四叉樹的搜索次數(shù)與二叉樹的搜索次數(shù)相同;假如讀寫器作用區(qū)域內(nèi)存在00011101,000110001,00000001和00001101這4個(gè)標(biāo)簽時(shí),產(chǎn)生如圖3c所示的情況,此時(shí)采用四叉樹,比二叉樹減少了2次搜索。
策略3:分組策略
由算法協(xié)議2)可知,在識(shí)別A組標(biāo)簽的過程中檢測(cè)到M1次只有2個(gè)比特位發(fā)生碰撞時(shí),采用本算法相當(dāng)于在二叉樹上減少了M1個(gè)葉子節(jié)點(diǎn),即搜索次數(shù)減少2×M1次。
本算法將以上3種策略結(jié)合在一起,讀寫器識(shí)別計(jì)數(shù)器R=0的所有標(biāo)簽需要搜索次數(shù)為

同樣,讀寫器識(shí)別計(jì)數(shù)器R=1的所有標(biāo)簽需要搜索次數(shù)為

因此,采用本算法讀寫器識(shí)別其作用區(qū)域內(nèi)的所有標(biāo)簽所需的搜索次數(shù)為

本算法的吞吐率可表示為

在MATLAB仿真平臺(tái)上對(duì)本算法、四叉樹搜索算法、基于后退策略的二進(jìn)制搜索算法、動(dòng)態(tài)調(diào)整二進(jìn)制搜索算法[8]和PDBS[9]進(jìn)行仿真。目前 EPC 編碼體系中使用較多的是EPC-64。在仿真實(shí)驗(yàn)中編碼位數(shù)n由標(biāo)簽數(shù)量決定。現(xiàn)取n=8,n=16兩種情況分別對(duì)讀寫器發(fā)出的搜索次數(shù)和系統(tǒng)的吞吐率進(jìn)行仿真,結(jié)果如圖4~圖7所示。



1)由圖4和圖5可看出:當(dāng)標(biāo)簽數(shù)目大于100時(shí),與其余4種算法相比,本文算法的搜索次數(shù)明顯減少,吞吐率增幅很大。

圖7 n=16時(shí)吞吐率比較
2)由圖6和圖7可看出:當(dāng)標(biāo)簽位數(shù)和標(biāo)簽數(shù)目一定時(shí),本文算法和PDBS算法明顯優(yōu)于四叉樹搜索算法、基于后退策略的二進(jìn)制搜索算法和動(dòng)態(tài)調(diào)整二進(jìn)制搜索算法;隨著標(biāo)簽數(shù)目的增加,本文算法的吞吐率較PDBS算法及其他算法越來越高。
3)由圖4~圖7可看出:當(dāng)標(biāo)簽位數(shù)一定時(shí),隨著標(biāo)簽數(shù)目的增加,將后退策略、分組策略和自適應(yīng)策略相結(jié)合的算法所得到的系統(tǒng)吞吐率明顯高于單純地選用四叉樹策略、后退策略或分組策略所得到的系統(tǒng)吞吐率。即當(dāng)標(biāo)簽位數(shù)一定時(shí),隨著讀寫器作用區(qū)域內(nèi)的標(biāo)簽數(shù)量N的增大,檢測(cè)出只有2位比特位發(fā)生碰撞的概率越大,發(fā)生圖3c的概率也將遠(yuǎn)大于發(fā)生圖3a的概率,即算法的吞吐率越大。
5 結(jié)束語
本文提出了一種基于分組策略的RFID自適應(yīng)防碰撞算法,該算法在二進(jìn)制搜索算法的基礎(chǔ)上加入了分組策略、后退策略和自適應(yīng)策略。分組策略和自適應(yīng)策略的引入,有效地降低了標(biāo)簽間的碰撞次數(shù),大幅地提高了讀寫器的吞吐率,再加上后退策略,又更進(jìn)一步地減少了讀寫器與標(biāo)簽間的通信量。通過對(duì)新算法的性能分析及對(duì)仿真結(jié)果的比較證明,新算法更高效地解決了標(biāo)簽的碰撞問題,具有良好的應(yīng)用前景。
[1]劉云浩.物聯(lián)網(wǎng)導(dǎo)論[M].北京:科學(xué)出版社,2011:33-37.
[2]王春華,許靜,彭關(guān)超,等.改進(jìn)的RFID標(biāo)簽識(shí)別防沖突算法[J].計(jì)算機(jī)工程與應(yīng)用,2011,47(31):104-107.
[3]FINKENZELLER K.RFID handbook fundamentals and applications in contactless smart cards and identification[M].2nd ed.West Sussex:John Wiley & Sons Ltd.,2003.
[4]郭志濤,程林林,周艷聰,等.動(dòng)態(tài)幀時(shí)隙 ALOHA算法的改進(jìn)[J].計(jì)算機(jī)應(yīng)用研究,2012,29(3):907-909.
[5]RYU J,LEE H,SEOK Y,et al.A hybrid query tree protocol for tag collision arbitration in RFID systems[C]//Proc.IEEE International Conference on Communications.[S.l.]:IEEE Press,2007:5981-5986.
[6]CHEN Y H,HORNG S J,RUN R S,et al.A novel anti-collision algorithm in RFID systems for identifying passive tags[J].IEEE Trans.Industrial Information,2010,6(1):105-121.
[7]丁治國,朱學(xué)永,雷迎科,等.基于啟發(fā)式函數(shù)的多叉樹防碰撞算法[J]. 計(jì)算機(jī)應(yīng)用,2012,32(3):665-668.
[8]謝振華,賴聲禮,陳鵬.RFID技術(shù)和防碰撞算法[J].計(jì)算機(jī)工程與應(yīng)用,2007,43(6):223-225.
[9]伍繼雄,江岸,黃生葉,等.RFID系統(tǒng)中二叉樹防碰撞算法性能的提升[J].湖南大學(xué)學(xué)報(bào):自然科學(xué)版,2010,39(12):82-86.
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:42
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
小學(xué)生作文(低年級(jí)適用)(2018年9期)2018-10-08 02:29:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛(wèi)生(2016年8期)2016-11-12 13:26:50