基于功率反饋的渦軸發動機神經網絡PID控制研究
2012-07-02 01:23:47段紹棟肖玲斐申濤
航空發動機 2012年2期
段紹棟,肖玲斐,申濤
(南京航空航天大學能源與動力學院,南京 210016)
基于功率反饋的渦軸發動機神經網絡PID控制研究
段紹棟,肖玲斐,申濤
(南京航空航天大學能源與動力學院,南京 210016)

段紹棟(1986),男,在讀碩士研究生,研究方向為航空發動機建模與控制技術。
通過對功率平衡關系進行分析,提出了利用功率反饋設計智能神經網絡PID控制器的方法。基于BP(Back Propagation)神經網絡,將功率信號作為神經網絡的輸入層信號,并改進了網絡權值的學習規則。通過在線整定PID參數,控制器能夠根據功率誤差信號的變化實時調整控制參數,從而使系統自主尋找到功率平衡點,具有良好的穩態和動態響應特性。仿真結果表明:該方法可以使渦軸發動機在全包線范圍內具有理想的控制性能。
渦軸發動機;BP神經網絡;PID控制;功率反饋;功率平衡;功率誤差
0 引言
PID控制器具有原理簡單、使用方便的特點,已在航空、機電、冶金、機械和化工等行業中獲得了廣泛應用[1]。但是,當被控對象含有強非線性和時變特性時,傳統的PID控制器往往難以獲得滿意的控制效果。航空發動機是1種強非線性的被控對象,其飛行特性在不同工況和飛行條件下將發生很大變化,而傳統的PID參數是根據對象數學模型的特定適應規則整定的,并且隨著對發動機性能要求的日益提高,設計出1個能在全包線下對發動機進行控制、且能達到滿意性能的PID控制器是非常具有挑戰性的[2]。隨著控制理論的發展和FADEC的日漸成熟,各種先進控制方法層出不窮,且被應用于航空發動機的嘗試和相關研究文獻也日漸增多[3-7]。
目前,人工智能與PID控制相結合并應用在發動機控制中已有研究。文獻[8]提出了1種發動機自適應神經網絡PID控制方法,對發動機非線性和建模的不確定性具有很好的自適應性和魯棒性;文獻[9]研究了當發動機偏離設計點時,采用神經網絡控制,使控制系統保持良好的性能;文獻[10]綜合了模糊推理、神經網絡自適應和PID簡單控制的各自優點,建立智能神經網絡自適應控制,取得了良好的控制性能;文獻[11]采用神經網絡控制在全包線范圍內獲得良好的動、穩態性能,但其神經網絡的輸入參數只考慮了高度和馬赫數,在滿足多變量控制時具有局限性。
本文結合BP神經網絡與PID控制器,構成了有效的智能神經網絡PID控制器,使渦軸發動機在全包線范圍內具有理想的控制性能。
1 基于功率反饋的PID控制器設計
渦軸發動機的輸出功率是動力渦輪功率,包括旋翼功率、尾槳功率和附件抽功。其中旋翼功率占需用功率的90%以上,所以暫時僅考慮旋翼需用功率。渦軸發動機控制的主要目的是在保證動力渦輪轉速不變的情況下實現系統的需用功率與輸出功率的動態平衡,即動力渦輪的輸出功率必須實時適應旋翼的需用功率。通過反饋功率動力渦輪輸出功率,并與旋翼需用功率進行比較,將二者的誤差信號作為PID控制器的輸入層信號,從而給出供油量調節規律,實現渦軸發動機的良好控制。基于功率反饋的渦軸發動機控制系統如圖1所示。圖中:PA為旋翼功率;PP為動力渦輪功率;e=PA-PP,為功率誤差信號;WFB為燃油量。在PID控制器作用下,誤差值e逐漸趨于0,實現了旋翼需用功率與動力渦輪輸出功率平衡。
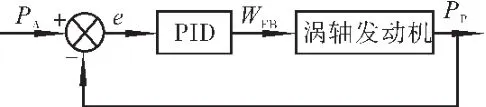
圖1 基于功率反饋的渦軸發動機控制系統
傳統的發動機控制器設計都是將渦輪轉速或壓比作為反饋信號,存在一定的滯后性。當旋翼功率與動力渦輪功率不平衡時,不能及時反映到燃油的控制上,而是先通過部件傳動轉化到渦輪轉速控制上,進而對燃油需求進行控制。本文提出的基于功率反饋設計控制器,能夠迅速地反映動力渦輪與旋翼的功率動態平衡情況,當功率動態平衡波動,即被控量與輸入量之間存在偏差時,通過控制器能實時并快速反映到燃油供給上。
2 基于功率反饋的渦軸發動機智能神經網絡PID控制器設計
PID控制器要獲得期望的控制效果,必須合理調整好比例、積分和微分3種控制作用,形成控制量中既相互配合又相互制約的關系,這種關系不一定是簡單的“線性組合”,從變化無窮的非線性組合中可以找出最優的控制參數[12]。傳統的PID控制器結構具有簡單、魯棒性強和操作簡單等優點,缺點是PID 3個控制參數整定困難,而神經網絡具有任意非線性的表達能力,因此將BP神經網絡引入到PID控制參數整定中[13],建立參數kP、kI、kD自學習的PID控制器。
2.1 BP神經網絡
BP神經網絡能學習和存貯大量的輸入-輸出模式映射關系,而無需事前揭示或描述這種映射關系的數學方程。其學習規則是使用最速下降法,通過反向傳播來不斷調整網絡的權值和閾值,使網絡誤差平方和最小。誤差的反向傳播將網絡的控制信號實時傳回神經網絡中,對網絡權值進行修正,適應實時變化的誤差信號。BP神經網絡模型拓撲結構包括輸入層、隱含層和輸出層,如圖2所示。
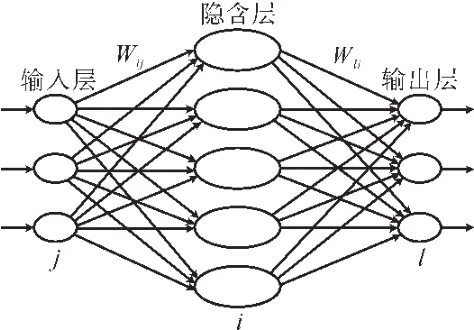
圖23 層BP神經網絡結構
從圖2中可見,3層BP神經網絡有j個輸入、i個隱含和l個輸出神經元。輸入、輸出神經元之間用隱含神經元作映射傳遞。對于輸入信號,先向前與網絡的反向權值Wij作用后傳遞到隱含層,經過作用函數后,再把隱節點的輸出信號與網絡的反向權值Wli作用后傳播到輸出節點,經激勵函數作用后輸出結果。
2.2 控制算法
以某渦軸發動機部件級模型為對象進行仿真控制研究。基于本文提出的功率反饋原理,采用輸入層j=3、隱含層i=5和輸出層l=3的BP神經網絡,并選定rin=PA、yout=PP和e=rin-yout,即旋翼功率、動力渦輪功率和功率誤差定義為神經網絡的輸入,經過輸入層后輸出不變。
網絡輸入層的輸入、輸出均為

網絡隱含層的輸入、輸出為
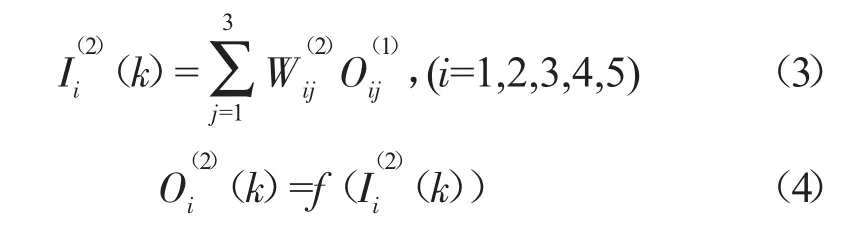

網絡輸出層的輸入、輸出為
式中:上角標(3)為輸出層,其輸出節點分別對應3個可調參數kP、kI、kD,由于3個參數不能為負值,所以輸出層神經元的活化函數取非負的Sigmoid函數

取性能指標函數

按照梯度下降法修正網絡的權系數,即按J(k)對加權系數的負梯度方向搜索調整,并附加1個使搜索快速收斂全局極小的慣性項

式中:η為學習速率;α為慣性系數。


由于系統的誤差e=PA-PP,當系統受到干擾、改變總距操作桿和油門桿時,e會突變,導致過大,反向傳遞的值激增,使加權系數脫離控制,引起系統超調或者失效,從而無法滿足控制要求,降低了系統的魯棒性。輸出量ΔU為


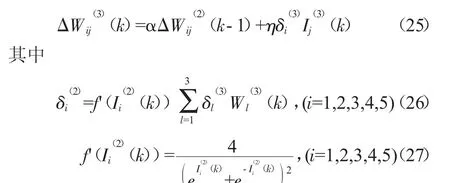
經仿真試驗,將θ=0.01作為最佳限幅值。同理可得隱含層加權系數的學習算法
2.3 渦軸發動機平衡關系分析及智能神經網絡PID控制
在發動機部件級模型控制中,當燃油量增加,渦輪進口燃氣溫度升高時,引起動力渦輪功率和與旋翼功率有關的物理轉速百分比均增大,而旋翼功率與物理轉速百分比成正比關系,因此旋翼功率在一定程度上增大,其需求功率增大將迫使燃油繼續增加,再返回繼續循環,如圖3所示。
在基于功率反饋進行控制器設計時,如果沒有1個有效的平衡控制點,系統將出現2種循環情況:旋翼功率和動力渦輪功率在燃油一直增大的情況下繼續增大,或在燃油一直減小的情況下繼續減少。對系統來說,這2種情況均不希望出現,在這樣的循環下系統必須能自主找到1個突破循環的控制點,傳統的PID控制由于kP、kI、kD參數是人為根據經驗或特定規則設定的,而在全包線范圍內則要通過模糊規則進行分區段控制。
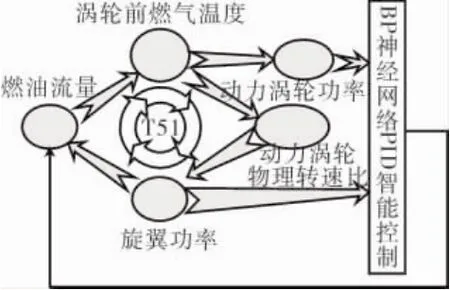
圖3 渦軸發動機平衡關系
通過BP神經網絡與PID控制相結合,由于系統不斷在線學習,即神經網絡對控制參數不停地訓練,周而復始的信息正向傳播和誤差反向傳播,各層權值不斷調整,直到尋找到系統控制的1個穩定點,即旋翼功率與動力渦輪功率擺脫循環的1個平衡點,從而實現負載功率與輸出功率的平衡。
2.4 系統控制結構
基于功率反饋的渦軸發動機神經網絡PID控制系統的結構如圖4所示。
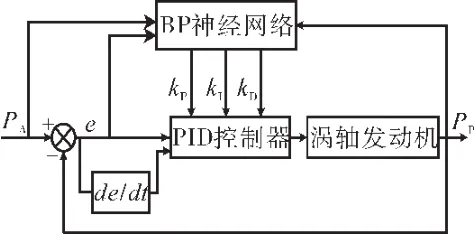
圖4 基于功率反饋的渦軸發動機神經網絡PID控制系統
從圖4中可見,BP神經網絡包括正向和反向傳播,其中旋翼功率與動力渦輪功率都是由模型在迭代運算過程中計算得到。在回路中,輸入信號旋翼功率、輸出信號動力渦輪功率和功率誤差信號構成BP神經網絡的輸入,在線調整權值修正kP、kI、kD,在PID控制器中,修正后的kP、kI、kD,與控制器輸入信號作用后得到需求燃油量大小的控制信號,該信號作用于渦軸發動機,維持發動機的輸入、輸出功率平衡。
3 控制系統仿真
基于某型渦軸發動機部件級模型數字仿真平臺進行研究,控制器以旋翼與動力渦輪功率差為誤差信號,綜合運用BP神經網絡與傳統PID控制的優點設計了智能PID控制器。為了進行對比,同時設計了傳統PID控制器并給定正確的PID參數。
在飛行高度H=0,飛行馬赫數Ma=0條件下進行仿真試驗,結果如圖5、6所示。
從圖5中可見,從啟動到系統平衡過程中,采用傳統的PID控制是采用本文方法所得的超調量,而其的2倍,造成供油浪費,系統的經濟性能差。
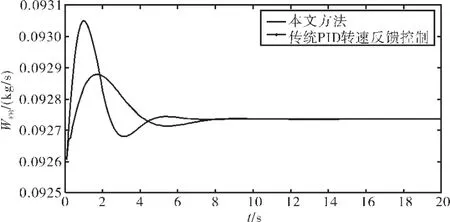
圖5 燃油量控制曲線

圖6 動力渦輪-旋翼功率控制曲線
從圖6中可見,采用本文方法的2條功率曲線幾乎重合,說明采用該方法使得發動機輸出功率與旋翼負載需用功率一直處于動態平衡,且最后達到穩態平衡需用的時間也較短;而傳統的PID控制雖然也有良好的跟蹤效果,但在動態過程中存在一定的功率偏差,且在穩態過程中功率不平穩,動態過程耗時偏長,影響發動機和直升機的整體飛行性能。
以上2種不同條件下的仿真結果表明,本文設計的基于功率反饋的智能PID控制器對渦軸發動機具有良好的控制效果。可見,結合BP神經網絡與PID控制,并改進權值學習規則,控制器在發動機狀態不斷變化的過程中持續學習,實時整定控制參數,通過功率反饋的調節作用,系統擁有1個良好的動、穩態平衡過程;同時加快了系統動態響應速度,增強了系統的魯棒性,提高了控制器的效率和性能。
4 結束語
本文設計的基于功率反饋的神經網絡PID控制器融合了BP神經網絡和傳統PID控制的優點。由于將功率引入到神經網絡中作為輸入層參與控制調節,并在算法中改進了網絡權值的學習規則,提高了系統控制效率,同時以動力渦輪功率作為反饋與旋翼功率進行誤差分析,得到了燃油的控制規律,加快了系統的響應速度,使系統具有良好的穩態和動態響應特性。
目前雖然難以直接測量動力渦輪功率與旋翼功率,但是可以通過大量試驗獲取功率與渦輪進口燃氣溫度、飛行高度、馬赫數和總距等相關變量的數學關系式,建立動力渦輪與旋翼的高精度功率模型,從而更好地運用本文所提出的基于功率反饋的神經網絡PID控制方法。
[1]王偉,張晶濤,柴天佑.PID參數先進整定方法綜述[J].自動化學報,2000,26(3):347-355.
[2]姚華,袁鴦,鮑亮亮,等.航空發動機神經網絡自學習PID控制[J].推進技術,2007,28(3):313-316.
[3]Bica B,Chipper F A J,Fleming P J.Towards fuzzy gain scheduling for gas turbine aeroengine systems:multiobjective approach[C]∥Proceedings of IEEE International Conference onIndustrialTechnology2000.Murbia,India:Jaico Publishing House,2000:19-22.
[4]楊剛,孫健國.一種新的H∞/LTR控制系統設計方法[J].航空學報,2004,25(2):104-107.
[5]黃金泉.航空發動機神經網絡自適應控制[D].南京:南京航空航天大學,1998.
[6]Turner M C,Bates D G,Postlethwaite I.Input/output conditioningofrobustintegratedflightandpropulsion controller[J].Journal of Guidance,Control and Dynamics, 2001,24(6):1089-1099.
[7]包睿,黃金泉.航空發動機反饋神經網絡自適應控制方法[J].航空發動機,2007,33(4):46-49.
[8]蔣衍君,黃金泉.航空發動機自適應神經網絡PID控制[J].航空動力學報,2000,15(3):334-336.
[9]郭迎清.航空發動機神經網絡自適應控制研究[J].航空動力學報,2001,16(1):83-86.
[10]趙俊,陳建軍,王靈剛.航空發動機的智能神經網絡自適應控制研究[J].航空動力學報,2008,23(10):1913-1920.
[11]姚華,鮑亮亮,孫健國.基于神經網絡的航空發動機全包線PID控制[J].南京航空航天大學學報,2007,39(2):236-239.
[12]劉金琨.先進PID控制及其MATLAB仿真[M].北京:電子工業出版社,2003:162-164.
[13]Willis M J,Montague G A.Auto-tuning PI(D)controllers with artificialneuralnetworks[C]//12thWCIFAC,Sydney, Australia,1993:61-64.
Neural Networks PID Control of Turboshaft Engine Based on Power Feedback
DUAN Shao-dong,XIAO Ling-fei,SHEN Tao
(College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
An intelligent neural networks PID controller based on power feedback was proposed by analyzing power balance.Based on BP neural network,the power signal was taken as the input layer signal,and the network weight learning rules was improved.According to on-line setting of PID parameters,the controller parameters was adjusted by the changes of power error signal,to find the power balance point independently and obatain excellent steady and dynamic response characteristics of system.The simulation results show that the turboshaft engine has satisfied control performance over the whole envelope.
turboshaft engine;BP neural network;PID control;power feedback;power balance;power error
國家自然科學基金(61004079)資助
2011-11-17
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17