基于籠型異步電機的螺旋槳負載模擬研究
2012-07-03 06:38:56張敬南叢望
船電技術 2012年4期
關鍵詞:船舶
張敬南 叢望
(哈爾濱工程大學 自動化學院,哈爾濱 150001)
0 引言
為了使所設計的船舶推進系統滿足性能指標的要求,結合螺旋槳模擬裝置對推進系統的設計進行演示驗證是必不可少的[1]-[4]。螺旋槳模擬裝置必須能真實地模擬實際工況下螺旋槳的特性才能對推進系統起到有效的檢驗。直流電機構建了螺旋槳負載轉矩模擬系統為推進系統提供螺旋槳負載模擬轉矩取得了很好的效果[5,6]。但是考慮到直流電機自身缺點,在大容量螺旋槳負載的模擬方面受到了限制。而現代電力電子技術及交流電機變頻控制技術的迅速發展,基于交流電機變頻控制技術來實現大容量螺旋槳負載模擬技術的研究成為可能。作者基于三相籠型異步電機進行螺旋槳負載模擬的研究,對三相籠型異步電機的轉矩矢量控制策略進行了研究,構建了基于轉子磁鏈定向的三相異步電機的轉矩控制系統。結合螺旋槳負載轉矩的數學模型,在MATLAB/Simulink仿真環境下進行了螺旋槳典型工況的仿真研究,探討了采用三相籠型異步電動機進行船舶螺旋槳負載轉矩模擬的可行性。
1 異步電機轉矩矢量控制
1.1 基于轉子磁鏈定向的異步電機數學模型
實現矢量控制的基本思想是通過坐標變換獲得等效的直流電機模型,從而實現電磁轉矩與磁鏈的分別控制,分別獲得轉矩分量和磁鏈分量的控制值,然后將轉子磁鏈定向坐標系中的控制量反變換得到三相坐標系的對應量,以獲得實際系統的控制參數。矢量控制采用基于mt旋轉正交坐標系下的異步電動機數學模型[7]。設定m軸沿著轉子總磁鏈矢量 Ψr的方向,t 軸與矢量 Ψr正交。mt旋轉正交坐標系籠型異步電機狀態方程為

轉差角速度

坐標系的旋轉角速度

角位移θ與坐標系的旋轉角速度的關系為

由于 ψr的方向定義為 m 軸,故 ψr=ψmr,且 ψtr=0。電磁轉矩為

1.2 轉矩閉環矢量控制策略

圖1 異步電機轉矩閉環矢量控制策略框圖
基于轉子磁鏈定向實現了異步電機的矢量解耦,為磁場和轉矩的控制提供了方便,基于轉子磁鏈定向的異步電機轉矩和磁場閉環矢量控制策略的原理框圖如圖1所示。轉矩控制環和磁鏈控制環均采用了具有電流閉環控制的雙閉環結構形式。圖中,ATR為轉矩調節器,轉矩調節器的輸出是電流轉矩分量給定值;AΨR為磁鏈調節器,輸出是電流勵磁分量給定值;ACTR為定子電流轉矩分量調節器;ACMR為定子電流勵磁分量調節器。電流環控制的作用是將檢測到的電流進行3/2轉換,得到mt坐標系中的電流ism和ist分別與給定值作比較,并設計調節器構成電流閉環,電流調節器的輸出是mt坐標系下定子電壓的給定值,經過反旋轉變化獲得靜止兩相坐標系的定子電壓值,再通過控制逆變器獲得輸出三相電壓。
異步電機轉子磁鏈的檢測基于 mt坐標系的電流與磁鏈關系確定,即根據式(1)中第三式和式(2)~式(4)來確定轉子磁鏈的大小和空間位置。
2 螺旋槳負載轉矩模型
螺旋槳推進器的作用是把原動機的轉矩轉變為用以克服船舶運動水阻力的推力,推進器通過把水推向反方向而得到船舶前進的運動。根據螺旋槳的工作原理[8],定義螺旋槳的進速為螺旋槳相對于水的軸向前進速度為

式中,Us為在船速,單位m/s;w為伴流系數,是考慮船在水中航行時產生對螺旋槳的伴流影響而引入的系數。
小米以“高配置、低價格”的概念迅速吸引大眾眼球,形成小米的競爭優勢。低價高品質符合手機發燒友的胃口,這一新的理念也讓小米手機在市場上迅速占有一席之地,獲得了可觀的利潤。
定義進速比修正值'J為

式中: Dp為螺旋槳的槳徑,單位為m;n為螺旋槳的轉速,單位為rps。
其軸向推力P和阻轉矩Mp可表示為

式中:ρ為海水密度,單位為 kg.s2/m4;Kp,Km分別為螺旋槳的推力系數和阻轉矩系數。相應的推力系數和阻轉矩系數也變為修正值,對應曲線和曲線
根據式(9),螺旋槳負載轉矩的大小與船舶的航行速度是有關的。當只考慮船舶的直航運動時,船舶運動方程為

式中:m為船體質量;k為附連水系數;Rf直航運動船舶所受阻力;t為推力減額系數,是考慮螺旋槳工作時使船體總阻力增加而引入的系數。
綜上,可得到船舶直航推進時考慮船槳相互作用的螺旋槳負載轉矩計算框圖如圖2所示。

圖2 螺旋槳負載轉矩計算框圖
為了突出螺旋槳負載模擬技術的研究重點,圖譜采用典型曲線數據進行擬合,重點研究船舶起航及反轉過程中螺旋槳負載轉矩所體現的起航特性和反轉特性。
3 螺旋槳負載轉矩模擬裝置仿真
基于圖2所示控制原理框圖構建螺旋槳負載轉矩模擬系統的仿真程序。
螺旋槳負載模擬系統采用的模擬電機為異步發電機:額定功率160 kW,額定電壓400 V(Y接),額定電流331 A,頻率30 Hz,額定轉速444 rpm。定子繞組電阻 0.0138 Ω,轉子繞組電阻0.00773 Ω,定、子漏電感0.152 mH,激磁電感7.69 mH。螺旋槳推進裝置采用基于轉速矢量控制的異步電動機推進系統,本文不作介紹。推進系統及螺旋槳的轉動慣量1972 kg?m2。結合螺旋槳推進系統起動及反轉過程進行螺旋槳負載轉矩模擬裝置的仿真,仿真曲線如圖3和圖4所示。

圖2 考慮船槳相互作用的螺旋槳轉矩模型

圖3 轉速與模擬負載轉矩曲線
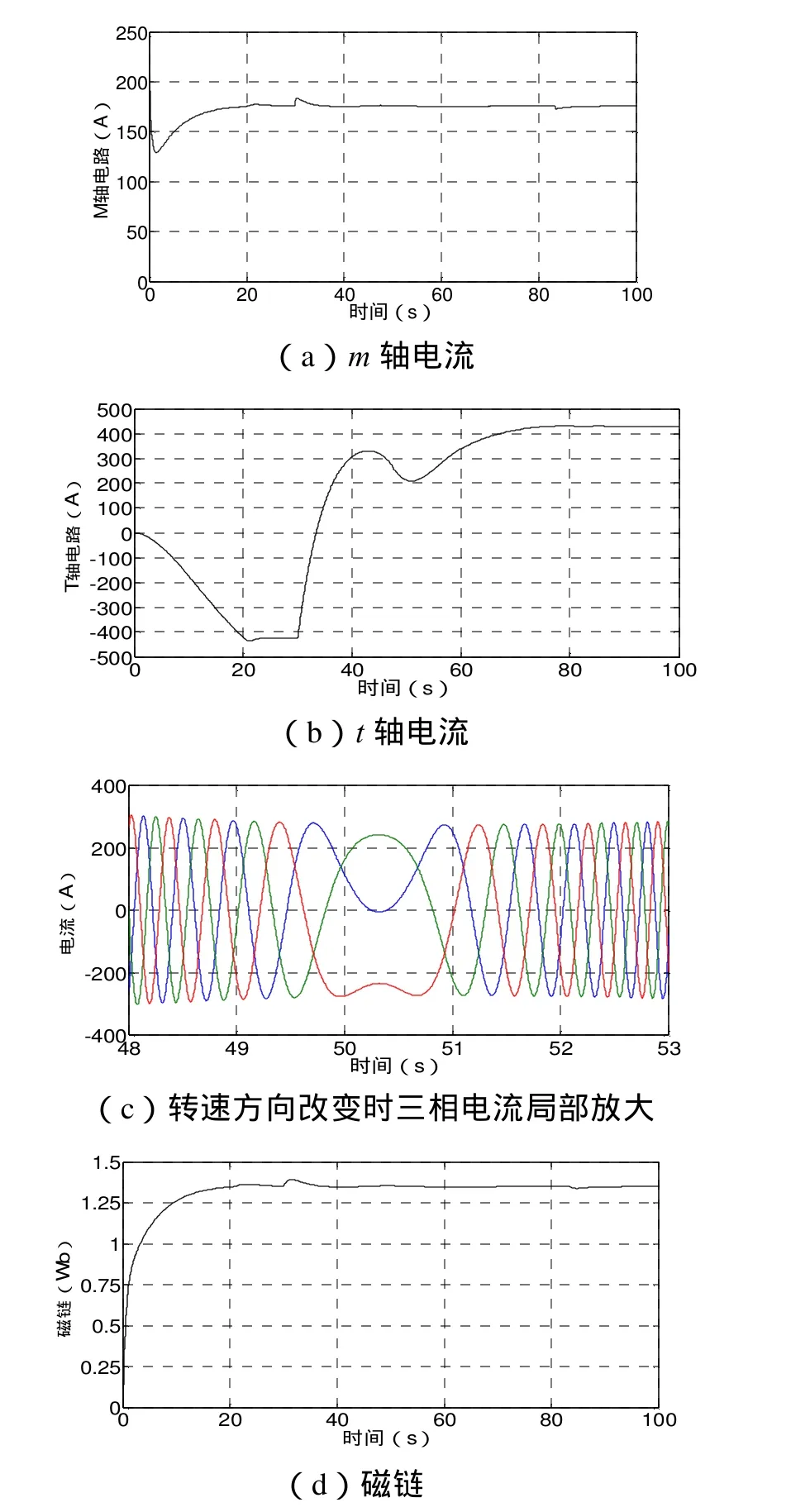
圖4 螺旋槳負載轉矩模擬過程中的電流與磁鏈
根據圖3所示,在螺旋槳起動及反轉過程中,轉矩負載模擬電機正確的模擬出負載轉矩情況,恰當的選擇調節其參數,可以獲得較好的轉矩跟隨性能,轉矩震蕩也較小。根據圖3(d)螺旋槳負載反轉特性的模擬中,反轉特性從第一象限(推進系統正向電動機狀態)到第四象限(推進系統回饋制動狀態),以及第四象限到第三象限(推進系統反向電動狀態)的過渡平滑,沒有發生反復的震蕩現象。
根據圖4所示,m軸電流、t軸電流體現了正確的變化形式,定子電流的勵磁分量(m軸)建立磁場后,受擾動波動較小,磁鏈波形較為穩定,如圖4(d)所示。當負載模擬電機被拖動正向旋轉時,負載模擬電機提供制動轉矩時,t軸電流小于0;減速過程中,推進系統出現了回饋制動,負載模擬電機提供驅動轉矩,t軸電流大于0;當轉速過零且反向旋轉時,負載模擬電機提供制動轉矩,但是根據圖4(c)所示,此時負載模擬電機三相電流相序反向,即負載模擬電機的旋轉磁場方向反向,所以t軸電流依然保持大于0的狀態。
4 結論
通過采用鼠籠式異步電機的轉矩控制實現轉矩負載的模擬,結合船舶螺旋槳負載轉矩特性進行了轉矩負載模擬的仿真研究,仿真曲線正確且滿足特性要求,驗證了基于轉矩矢量控制的籠型異步電機進行螺旋槳負載轉矩模擬的可行性。
本文研究所采用的轉矩矢量控制的思想基于電動機速度調節矢量控制的思想,控制算法和控制器設計簡單;磁鏈閉環和轉矩閉環均采用雙閉環形式,通過引入的電流內環,實現了限幅保護并加快了跟隨性能。
本文研究成果可以為大功率轉矩負載模擬的實現提供了理論依據和設計方案,有助于大功率船舶陸上聯調實驗室的建設及其他機械負載模擬系統的構建。
[1]賀慧英,沈建清. 艦船電力推進負載試驗技術研究[J]. 哈爾濱工程大學學報. 2009, 30(4): 83-89.
[2]馬偉明. 電力集成技術[J]. 電工技術學報, 2005,20(1): 16-20.
[3]LITTLE G T, YOUNG S S, NEWELL J M. The electric warship Ⅶ : the reality[J]. Journal of Marine Design and Operations, 2003(2): 3-16.
[4]Ren W., Steurer M., Woodruff S. Progress and challenges in real time hardware-in the loop simulations of integrated ship power systems[J].Power Engineering Society General Meeting, 2005.IEEE. 2005: 534~537.
[5]陳實如, 李殿璞. 船用螺旋槳負載動態仿真裝置研究[J]. 2001.22(2): 37-40.
[6]劉勇.一種能模擬螺旋槳特性的新型負載模擬裝置的研制[J]. 黑龍江工程學院學報, 2002(16): 30-32.
[7]阮毅, 陳伯時. 電力拖動自動控制系統(第4版)[M].北京: 機械工業出版社, 2010.
[8]李殿璞. 船舶運動與建模(第 2版)[M]. 北京: 國防工業出版社, 2008.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
