履帶式雙控滅火移動機器人的設計與實現
2012-07-04 09:43:20許瑛,袁磊,肖亮
制造業自動化 2012年17期
許 瑛,袁 磊,肖 亮
(1.南昌航空大學 飛行器工程學院,南昌 330063;2.南昌航空大學 航空制造工程學院,南昌 330063)
0 引言
近年來,小型地面移動機器人及其相關關鍵技術,已成為移動機器人領域的研究熱點。小型地面移動機器人能廣泛應用于消防救援、反恐防爆、防核化作業、軍用偵查探測和無人地面武器平臺,在完成特殊作業任務的同時,可減少人員傷亡、提高在各種危險場合和環境中處理突發事件的能力。
本文提出一種履帶式雙控滅火移動機器人,在具備運動越野性能的同時,利用手動和自動控制兩種模式,搭載連桿式滅火執行機構,配置泡沫滅火劑或粉末滅火劑,實現滅火功能。
1 機械結構設計
1.1 車體結構設計
雙控滅火移動機器人要求實現越野越障和作業裝備搭載功能,在結構設計上可通過機器人底盤及其搭載平臺來實現。考慮到履帶式移動方式在越野機動性和越障性能上比輪式移動方式更具優勢,雙控滅火移動機器人的底盤采用履帶式移動方式。其搭載滅火執行機構和控制系統、配備泡沫滅火劑或粉末滅火劑,來實現滅火功能。機器人車體的技術參數如表1所示。
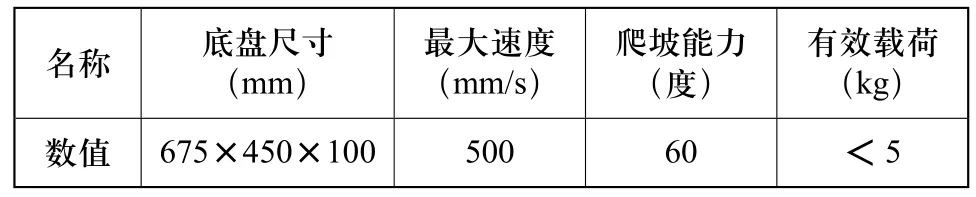
表1 機器人車體的技術參數
其總體布局如圖1所示。
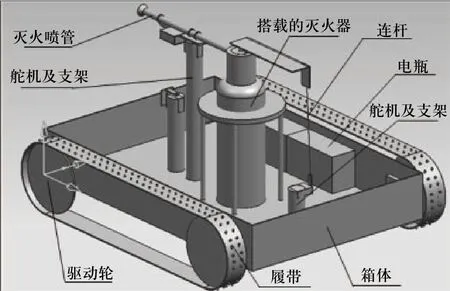
圖1 機器人車體結構設計圖
1.2 滅火執行機構設計
滅火執行機構如圖2所示,主要由四個舵機及兩套連桿機構組成。舵機A(圖中13)主要用于滅火器閥門的開閉驅動,舵機B(圖中6)用于驅動噴頭管在水平面內左右往復擺動,舵機C(圖中4)用于驅動噴頭管在鉛錘面內上下往復擺動,舵機D(圖中2)驅動火焰傳感器探測板做往復擺動以探測火焰。通過閥門的開閉來帶動滅火作業,在閥門處設計了閥門控制臂,以此來構成增益連桿機構杠桿,使整個滅火執行機構開啟的過程易于實現。為了保證閥門開閉時的工作可靠性和安全性,防止在閥門產生振動,設計了舵機專用的支架支撐舵機。 在滅火執行機構工作時,為了增強機構的靈活性,增加了噴頭擺動連桿機構。滅火器自帶的長噴頭管與兩塊連桿機構的搖桿固接在一起,以便實現操作空間往復擺動。
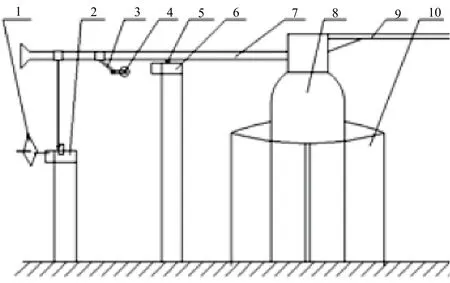
圖2 滅火執行機構簡圖
2 控制系統設計
2.1 硬件設計
本系統硬件部分由主控制器模塊、運動控制模塊、電源模塊、火焰檢測模塊、舵機控制模塊、直流電機驅動模塊、無線射頻收發模塊和GSM模塊組成。系統硬件結構如圖3所示。
主控制器模塊以飛思卡爾公司的16位微處理器MC9S12DG128為控制核心, 電源模塊由24V/2000mAh的電瓶組直接供電,主控制器模塊采用單獨的穩壓電路進行供電,電機驅動芯片MC33886直接由電源供電。通過外圍電路將電源分配給各模塊。火焰檢測模塊中主要選用R2868火焰傳感器和MC145018P煙霧傳感器2868火焰傳感器是用來探測火焰強弱的,MC145018P煙霧傳感器主要是感受火場的煙霧的大小,結合火焰傳感器的信號,對火場火勢的大小做出精確判斷。
2.2 軟件設計
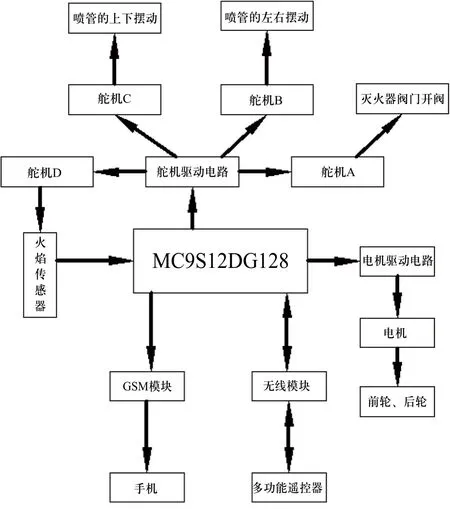
圖3 控制硬件總體結構圖
根據滅火過程要求和系統硬件電路組成,采用ATMega單片機和模塊化設計方法進行軟件編程,通過以上硬件電路對滅火機器人進行運動控制。程序開始后首先進行數據初始化,然后滅火機器人根據三種不同情況執行相應的動作,若檢測到障礙物,則進入避障子程序;若無障礙物,則進入尋跡子程序;若找到火源,則選擇控制模式,進入噴滅火劑滅火子程序。滅火完成后,整個程序結束。
3 雙控滅火模式的實現
履帶式移動滅火機器人能有手動遙控滅火和自動滅火兩種滅火方式。兩種滅火方式交替使用,當近距離的小火情出現時,可以使用手控模式,打開滅火機器人的電源開關,通過手中遙控器來控制機器人前后左右運動,機器人行進到滅火點時,根據火點火勢的大小控制滅火器閥門的開度以及噴頭擺動的角度,實施滅火作業。
在遠距離或強火勢、火場的能見度低,不便于操控者對滅火機器人實行遙控的情況下,可以切換到自動滅火模式。自動模式下滅火機器人可以通過安裝在小車前部的R2868火焰傳感器的探測頭來精確探測火點的位置與感知火勢的大小的信息,把檢測到的火勢信息反饋給主控制器模塊系統,主控制器模塊主動把這信息傳給GSM模塊,通過GSM技術進行人機交流,同時主控制器模塊啟動自動滅火模式,驅動機器人的電機,使小車行駛到火點,開啟滅火器閥門,噴頭搖臂左右上下擺動,實施精確滅火,滅火操作結束后,又把信息發送給GSM模塊,通過短信的方式通知戶外人員,火已經撲滅。
4 功能驗證
雙控滅火機器人的實驗樣機如圖4(a)、(b)所示。
課題組利用自行研制的雙控滅火機器人在實驗室環境下,對機器人的功能進行驗證。
1)運動能力:該機器人在手動及自動兩種狀態下,可以在平地上快速前行、后退,并可在3600范圍內進行原地正反轉,運動速度可以調節。
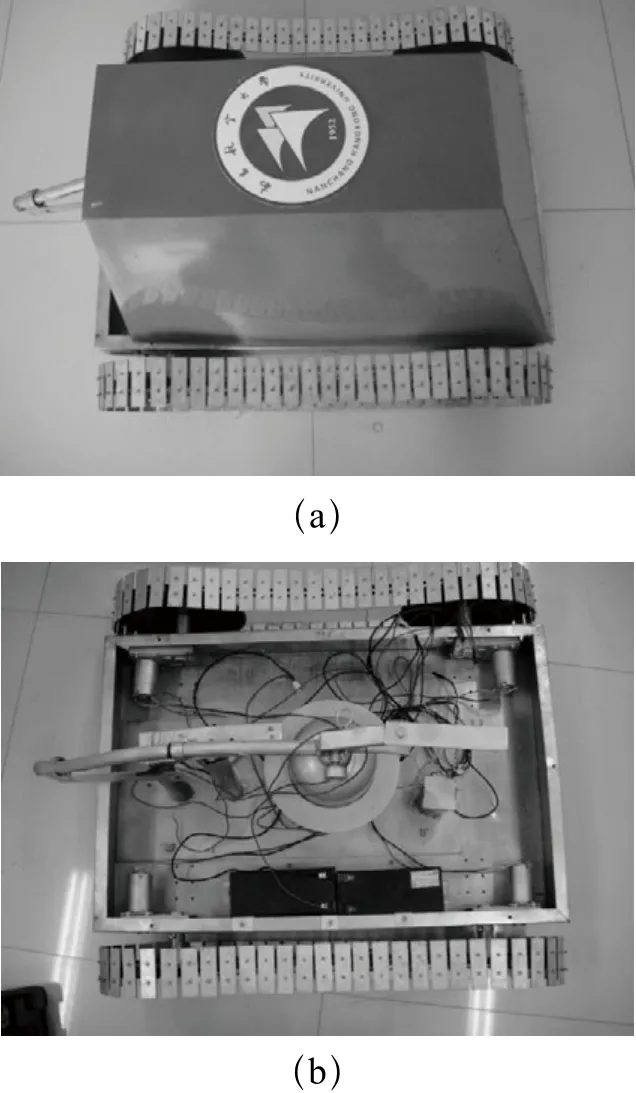
圖4 雙控滅火機器人實驗樣機
2)定位能力:該機器人能夠在距離火勢一定位置上停止運動,然后滅火機構開始作業。
3)雙向控制模式的切換:手動遙控滅火和自動滅火兩種滅火方式的切換通過手持式接收站來選擇,試驗結果,兩種控制模式切換可靠,操作簡便。
4)滅火執行機構工作范圍:滅火執行機構的擺桿上下擺動范圍為±1350,左右擺動范圍為±2100。
5)煙霧報警功能:利用煙霧傳感器感受火場的煙霧的大小,結合火焰傳感器的信號,對火場火勢的大小做出精確判斷。
5 結束語
實驗結果表明,采用該滅火機器人可有效、快速滅火,達到了預期的效果。
[1] 劉偉, 張茂青, 顧俊強, 等.基于ATmega32L單片機的滅火機器人的設計[J].江蘇電器, 2008(2): 40-43.
[2] 張景川, 劉立陽, 傅家詳.新型滅火機器人的設計與實現[J].機電工程技術, 2009, 4: (8).
[3] 宗光華.機器人的創意設計與實踐[M].北京: 北京航天航空大學出版社, 2004.
[4] 關慧貞, 邱鐵, 葉希貴.基于51型單片機的自動巡線輪式機器人控制系統設計[J].國外電子元器件, 2006, 37: (3).
[5] 崔平, 翁正新.機器人滅火創新實驗的設計與實現[J].實驗室研究與探索, 2006, 3.
[6] 羅志增, 蔣靜坪.機器人感覺與多信息融合[M].北京: 機械工業出版社, 2002.
[7] 關為民, 陳帝伊, 馬孝義.智能滅火機器人硬件電路的設計與實現 [J].微型機與應用, 2010-29, (4).
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
流程工業(2022年3期)2022-06-23 09:41:08
煤氣與熱力(2021年3期)2021-06-09 06:16:18
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
中學科技(2014年11期)2014-12-25 07:38:53
太空探索(2014年3期)2014-07-10 14:59:39
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
