有源濾波器復(fù)合控制策略的研究
2012-07-04 02:46:12呂敬高
船電技術(shù) 2012年5期
呂敬高
(海軍駐湖南地區(qū)軍事代表室,湖南湘潭411101)
0 引言
目前,濾除諧波主要采用無源濾波器和有源電力濾波器(APF)兩種方式。APF與傳統(tǒng)的無源濾波器相比,具有響應(yīng)速度快、補(bǔ)償效果好、能夠?qū)崿F(xiàn)動(dòng)態(tài)連續(xù)實(shí)時(shí)補(bǔ)償?shù)忍攸c(diǎn)[1~3]。因此,近年來,有源濾波器得到了迅速的發(fā)展。
現(xiàn)今對(duì)APF補(bǔ)償電流的控制方法大多采用傳統(tǒng)PI控制[4-5]。PI控制算法簡單、可靠性高,被廣泛應(yīng)用于工業(yè)過程控制中。本文將廣義積分控制器引入APF電流跟蹤控制環(huán)節(jié)中。為了進(jìn)一步改善傳統(tǒng)廣義積分控制器的動(dòng)態(tài)性能,本文設(shè)計(jì)了一個(gè)模糊輔助調(diào)節(jié)器來動(dòng)態(tài)調(diào)節(jié)廣義積分控制器的各個(gè)控制參數(shù),以同時(shí)獲得較好的動(dòng)態(tài)性能與穩(wěn)態(tài)性能。并通過仿真與實(shí)驗(yàn)驗(yàn)證了此復(fù)合控制器性能。
1 APF的工作原理
圖1顯示了三相并聯(lián)APF系統(tǒng)的主電路結(jié)構(gòu)圖。三相二極管整流橋作為非線性負(fù)載,一個(gè)電壓源的逆變器被用作APF。
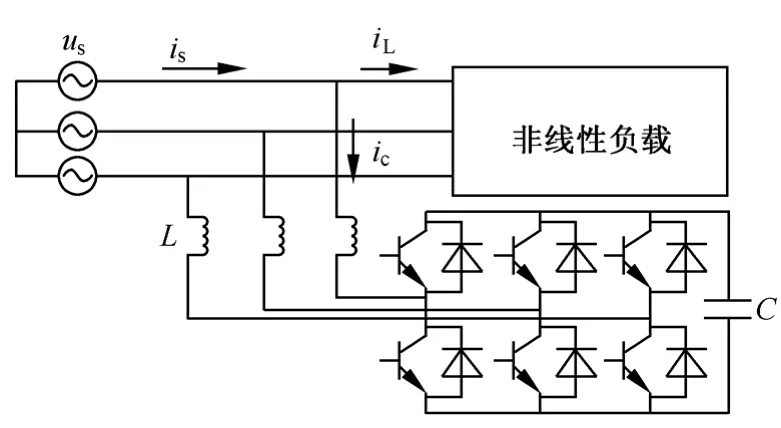
圖1 三相APF系統(tǒng)結(jié)構(gòu)圖
從圖1可以看出

因?yàn)椴⒙?lián)型有源濾波器主要是用來補(bǔ)償諧波電流的,而且現(xiàn)在主要的諧波污染是電流諧波,所以在本文中研究并聯(lián)有源濾波器性能的過程中,均假設(shè)電源電壓為理想的,即為單一頻率的正弦波形,可表示為:

其非線性負(fù)載中含有基波電流 iLf和諧波電流iLh。基波電流iLf又包含有功和無功兩部分,如式(3)所示。
式(5)表明,通過對(duì) APF的合理控制,則三相電源只需提供負(fù)載的基波有功電流,從而達(dá)到補(bǔ)償負(fù)載無功和消除諧波的目的。
并聯(lián)型有源濾波器電流控制主要由兩大部分組成,即指令電流運(yùn)算和補(bǔ)償電流發(fā)生部分,其中補(bǔ)償電流發(fā)生部分又包括電流跟蹤控制電路、驅(qū)動(dòng)電路和主電路三部分。電流跟蹤控制器的性能直接決定有源濾波器諧波補(bǔ)償性能的好壞,如何設(shè)計(jì)一個(gè)好的電流控制器至關(guān)重要。
2 廣義積分電流控制器
2.1 廣義積分算法
如果 APF采用對(duì)電源電流直接閉環(huán)控制的電流跟蹤策略,電流的參考信號(hào)是由多個(gè)頻率的諧波疊加而成的,為了進(jìn)行APF的無差調(diào)節(jié),實(shí)現(xiàn)被控量對(duì)其給定參考值的無差跟蹤,需要將多個(gè)不同頻率諧波的廣義積分器并聯(lián)使用。事實(shí)上,根據(jù)工程實(shí)際的要求以及電網(wǎng)或者非線性負(fù)載的特征諧波次數(shù),APF只需要著重治理有限的幾次諧波。比如,諧波源為三相全控整流橋時(shí),其特征諧波為6k±1次,APF一般只需要抵消5、7、11、13、17、19次諧波,電源電流就非常接近于基波正弦信號(hào),所以控制器只要包含與這些諧波相對(duì)應(yīng)的廣義積分器,再加上比例調(diào)節(jié)器,如圖2所示,APF就可以達(dá)到滿意的電流跟蹤性能。控制器傳遞函數(shù)如式(6)所示。

圖2中,uc是逆變器電壓參考,is是電源電流參考,is是電源電流。KP是比例系數(shù),Kih等是廣義積分器的系數(shù),h表示諧波次數(shù),ω1為基波角頻率,e是電源電流參考值和實(shí)際值的誤差,也即為ish。采用圖2所示的電流控制器,可以有選擇地對(duì)5、7、11、13、17、19次諧波進(jìn)行補(bǔ)償。
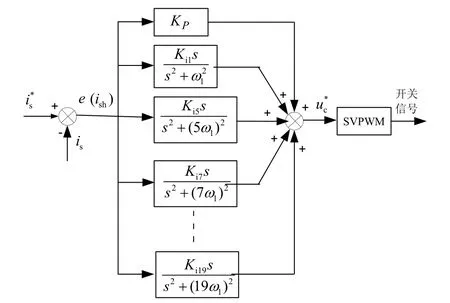
圖2 APF廣義積分電流控制器
2.2 廣義積分控制算法的穩(wěn)態(tài)無差特性分析
本小節(jié)將從閉環(huán)控制的角度,對(duì)廣義積分迭代控制算法的穩(wěn)態(tài)無差特性進(jìn)行理論分析。
控制方式為:

GA的傳遞函數(shù)為:

定義諧波抑制比參數(shù)為:

此諧波抑制比可以很好地體現(xiàn)諧波抑制特性,表征諧波衰減率,將式(8)代入,可以看出γ(s)含有6個(gè)零點(diǎn)s=hω1(h=15,7,11,17,19),因此有:

即Ish(hω1)=0。因此,流入電網(wǎng)的h次諧波電流為零。
可以看出,電源電流諧波不含有h倍基波頻率的信號(hào),即對(duì)這些頻率的信號(hào),廣義積分控制器可以實(shí)現(xiàn)無差控制,能夠保證隨著時(shí)間的推移,APF的輸出電流對(duì)參考電流的跟蹤誤差趨進(jìn)于零,從而使電源電流也接近于理想的狀態(tài)。
式(8)的波特圖如圖3所示,可以看出,指定次諧波都得到了有效地衰減。
3 復(fù)合控制器的設(shè)計(jì)
為了提高控制系統(tǒng)的魯棒性和抗干擾性,本文將模糊控制理論引入到廣義積分控制器中來,設(shè)計(jì)了一個(gè)帶有自調(diào)整因子的輔助模糊控制器來根據(jù)系統(tǒng)的實(shí)際情況,實(shí)時(shí)地調(diào)整廣義積分控制器的控制參數(shù)。
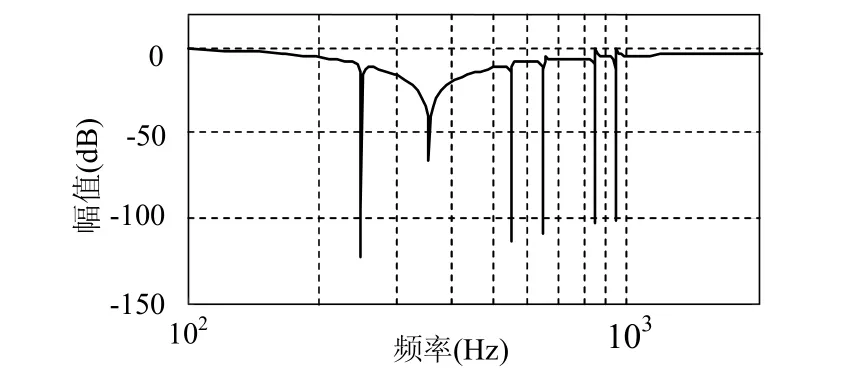
圖3 電流諧波衰減率
在廣義積分 PI控制器中,比例環(huán)節(jié)的作用是成比例地反映控制系統(tǒng)的偏差信號(hào) e,偏差一旦產(chǎn)生,控制器立即產(chǎn)生控制作用,以減少偏差;如果比例控制參數(shù)Kp取值過大,會(huì)引起系統(tǒng)振蕩,破壞系統(tǒng)動(dòng)態(tài)性能。因此,當(dāng)偏差e較大時(shí),為提高系統(tǒng)響應(yīng)速度,Kp取大值;當(dāng)偏差較小時(shí),防止超調(diào)過大產(chǎn)生振蕩,Kp應(yīng)減小;當(dāng)偏差e很小時(shí),為使系統(tǒng)盡快穩(wěn)定,則Kp應(yīng)繼續(xù)減小。同時(shí)也應(yīng)考慮誤差變化率e˙的因素,當(dāng)e和e˙同號(hào)時(shí),輸出向偏離穩(wěn)定值的方向變化,此時(shí)應(yīng)適當(dāng)增大Kp;反之,適當(dāng)減小Kp。
積分環(huán)節(jié)主要用于消除靜差,提高系統(tǒng)的穩(wěn)態(tài)精度。它對(duì)誤差進(jìn)行積分,對(duì)系統(tǒng)控制有一定的滯后作用,積分作用過強(qiáng),會(huì)造成系統(tǒng)超調(diào)增大,甚至引起振蕩。在常規(guī)PI控制器中,為防止積分飽和,常將積分環(huán)節(jié)分離出來,當(dāng)誤差減小至一定范圍時(shí),才加入積分環(huán)節(jié)。因此,當(dāng)誤差e較大時(shí),為避免系統(tǒng)超調(diào),Ki取零值;當(dāng)誤差e較小時(shí),積分環(huán)節(jié)有效,隨著誤差e的減小而增大,以消除系統(tǒng)的穩(wěn)態(tài)誤差,提高控制精度。
基于以上思想,本文所設(shè)計(jì)的改進(jìn)廣義積分控制器的結(jié)構(gòu)如圖4所示,它由廣義積分控制器和自調(diào)整模糊輔助控制器組成。使用自調(diào)整模糊輔助控制器主要是為了實(shí)現(xiàn)廣義積分 PI控制器參數(shù)的在線實(shí)時(shí)整定,即根據(jù)系統(tǒng)的采樣誤差信息,將誤差e和其導(dǎo)數(shù)˙輸入模糊控制器,通過模糊決策,在廣義積分PI參數(shù)預(yù)整定的基礎(chǔ)上實(shí)時(shí)在線整定PI參數(shù),以達(dá)到最佳控制效果。
所采用的模糊控制器為二維輸入、二維輸出控制器,根據(jù)不同的輸入e、計(jì)算出輸出ΔKi,從而實(shí)現(xiàn)廣義積分PI控制器參數(shù)的調(diào)整,如下所示:

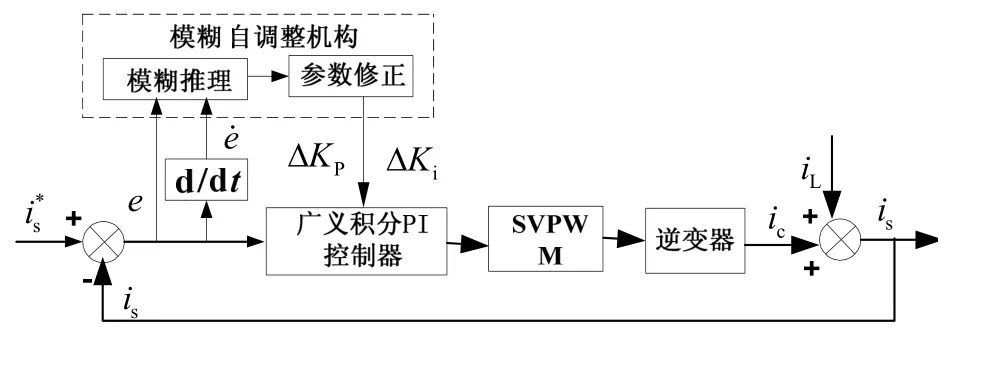
圖4 基于模糊調(diào)整的廣義積分控制策略
在模糊控制系統(tǒng)中,模糊控制器的性能對(duì)系統(tǒng)的影響很大,而模糊控制器的性能在很大程度上又取決于模糊控制規(guī)則的確定及可調(diào)整性。在這里設(shè)計(jì)了一種在全論域范圍內(nèi)帶有自調(diào)整因子的模糊控制器,其通過引入一個(gè)可調(diào)的參數(shù)對(duì)控制規(guī)則進(jìn)行調(diào)整,以便適應(yīng)系統(tǒng)的復(fù)雜多變性。本文采用的帶有自調(diào)整因子的 Kp模糊調(diào)整規(guī)則可以表示為:
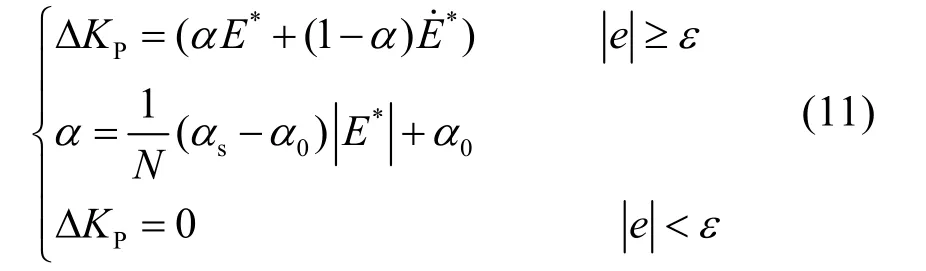
式中, 0 ≤ α0≤ αs≤1為常數(shù), α ∈[α0, αs]是自調(diào)整因子,N為量化等級(jí)常數(shù), E*與分別為e和˙的模糊量,ε為預(yù)置的閥值,即當(dāng)誤差大于此閥值時(shí),采用本文設(shè)計(jì)的調(diào)整策略對(duì)比例系數(shù)進(jìn)行實(shí)時(shí)調(diào)整;而當(dāng)誤差小于此閥值時(shí),不再調(diào)整比例系數(shù),將其設(shè)置為預(yù)置值,以防止引起振蕩。
本文設(shè)計(jì)的積分系數(shù)Ki的模糊調(diào)整規(guī)則如式(12)所示:
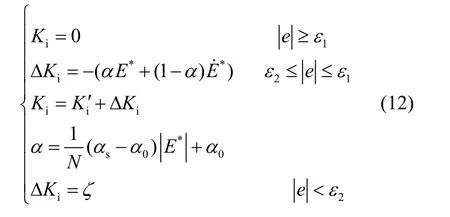
式(12)所示調(diào)整規(guī)則是基于上述基本調(diào)整原理得出的,即當(dāng)誤差非常大的時(shí)候,先不采用積分環(huán)節(jié),防止過大的超調(diào)及振蕩的發(fā)生;當(dāng)誤差減小到一定程度后,投入積分環(huán)節(jié);當(dāng)誤差減小到較小閥值時(shí),此時(shí)應(yīng)加強(qiáng)積分環(huán)節(jié)作用,并且為了防止頻繁調(diào)節(jié)帶來的抖動(dòng),將積分變動(dòng)值設(shè)定為一個(gè)固定的值ζ,以更好地提高穩(wěn)態(tài)精度。
4 仿真與實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證所設(shè)計(jì)的改進(jìn)廣義積分控制策略的有效性,利用 MATLAB進(jìn)行了仿真研究,并與傳統(tǒng)的PI控制進(jìn)行了比較,主要從穩(wěn)態(tài)精度與動(dòng)態(tài)響應(yīng)速度兩個(gè)方面進(jìn)行比較。仿真結(jié)果如圖 5、圖6所示,可以看出,在APF投入后,電網(wǎng)電流中的諧波分量得到了有效地補(bǔ)償。當(dāng)負(fù)載電流在0.2 s發(fā)生變化時(shí),基于本文所設(shè)計(jì)的改進(jìn)廣義積分控制策略可以更好地、更為快速地跟蹤負(fù)載電流的變化,其動(dòng)態(tài)響應(yīng)速度與穩(wěn)態(tài)精度都比傳統(tǒng)的PI控制器高。
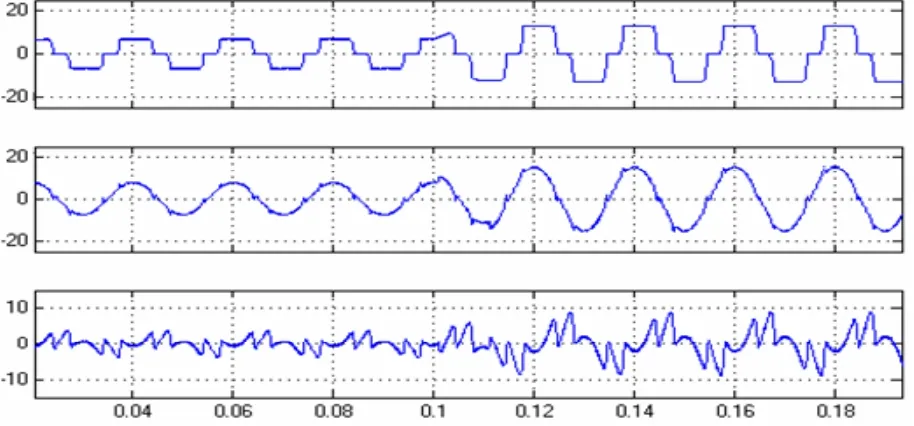
圖5 基于改進(jìn)廣義積分控制器的系統(tǒng)響應(yīng)曲線
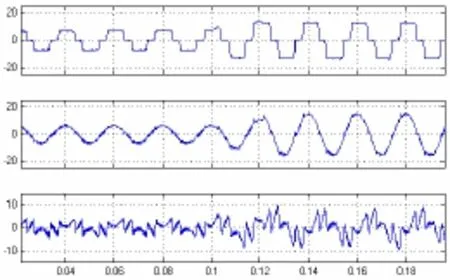
圖6 基于傳統(tǒng)PI控制器的系統(tǒng)響應(yīng)曲線
為了進(jìn)一步驗(yàn)證本文所提出的復(fù)合控制策略的正確性、有效性,本文在實(shí)驗(yàn)平臺(tái)上面進(jìn)行了實(shí)驗(yàn)研究。實(shí)驗(yàn)中諧波源為三相整流橋帶阻感負(fù)載,實(shí)驗(yàn)波形采集用示波器為 Tektronix TDS 3032。實(shí)驗(yàn)結(jié)果如圖7、圖8所示。可以看出,在改進(jìn)的廣義積分控制策略下,APF可以很好地補(bǔ)償諧波電流,并且可以在一個(gè)電網(wǎng)周期內(nèi)快速地跟蹤負(fù)載電流的變化,性能優(yōu)于傳統(tǒng)PI控制策略,與仿真結(jié)果相吻合。
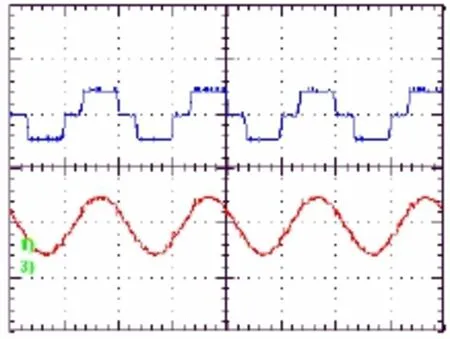
圖7 改進(jìn)廣義積分控制下APF投入前后的電源電流曲線
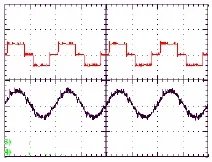
圖8 傳統(tǒng)PI控制下APF投入前后的電源電流曲線
5 結(jié)論
控制系統(tǒng)是 APF的關(guān)鍵環(huán)節(jié),直接影響到APF的工作性能。APF的控制系統(tǒng)包括補(bǔ)償電流跟蹤控制和主電路直流側(cè)電容電壓控制。
對(duì)于電流跟蹤控制,本章設(shè)計(jì)了基于模糊自調(diào)整的廣義積分控制策略,通過模糊輔助調(diào)整器來動(dòng)態(tài)調(diào)節(jié)廣義積分控制器的各個(gè)控制參數(shù),使此電流控制器可以同時(shí)獲得較好的動(dòng)態(tài)性能及穩(wěn)態(tài)性能。
[1]王兆安, 楊君, 劉進(jìn)軍. 諧波抑制和無功功率補(bǔ)償[M]. 北京: 機(jī)械工業(yè)出版社, 1998.
[2]EI-Habrouk M, Darwish M K, Mehta P. Active power filter: a review[J]. IEE Proceedings-Electrical., Power Application, 2000, 147(5): 403~413
[3]顧建軍, 徐殿國, 劉漢奎等. 有源濾波技術(shù)現(xiàn)狀及發(fā)展[J]. 電機(jī)與控制學(xué)報(bào), 2003 , 7(2): 126~132.
[4]D.M. Brod, D.W. Novotny. Current Control of VSIPWM Inverters. IEEE Procs. of IAS.1984: 418~425.
[5]J. Dixon, S. Tepper, L. Moran. Practical Evaluation of Different Modulation Techniques for Current-Controlled Voltage Source Inverters. IEE procs. Electr.Power Appl. 1996, 143(4): 301~306.
