駕駛室航行值班報(bào)警系統(tǒng)的設(shè)計(jì)
2012-07-06 10:01:14黃曉中
上海海事大學(xué)學(xué)報(bào) 2012年1期
黃曉中
(上海融德機(jī)電工程設(shè)備有限公司 研發(fā)部,上海 200135)
0 引言
根據(jù)國際海事組織(International Maritime Organization,IMO)海上安全委員會(huì)(Maritime Safety Committee,MSC)2002 年5 月20 日通過的MSC.128(75)決議《駕駛室航行值班報(bào)警系統(tǒng)(Bridge Navigational Watch Alarm System,BNWAS)執(zhí)行標(biāo)準(zhǔn)》,設(shè)計(jì)和生產(chǎn)BNWAS.該系統(tǒng)的目的是檢測駕駛室的活動(dòng),當(dāng)發(fā)覺操作人員能力喪失、值班駕駛員(Officer Of Watch,OOW)意識(shí)狀態(tài)降低或當(dāng)該值班人員因某種因素未履行值班員職責(zé)可能導(dǎo)致航海事故時(shí),系統(tǒng)可自動(dòng)通過指示燈和警報(bào)聲及時(shí)提醒船長或其他勝任的值班人員,如大副、二副或三副.此外,BNWAS 還配備讓值班人員通過應(yīng)急呼叫得到及時(shí)援助的設(shè)施.[1]
BNWAS 完全符合IMO 的MSC.128(75)決議《駕駛室航行值班報(bào)警系統(tǒng)(BNWAS)執(zhí)行標(biāo)準(zhǔn)》、IEC 62616-2010《駕駛室航行值班報(bào)警系統(tǒng)》、IEC 60945-2002《海上導(dǎo)航和無線電通信設(shè)備及系統(tǒng)/一般要求/測試方法和要求的測試結(jié)果》的規(guī)定.
相對于陸用工業(yè)設(shè)備而言,船用測控設(shè)備系統(tǒng)必須具有更高的抗干擾能力、可靠性、安全性,相關(guān)船舶規(guī)范要求的型式認(rèn)可測試也更為嚴(yán)格.
1 系統(tǒng)主要功能
BNWAS 授權(quán)船長通過面板上的鑰匙開關(guān)選擇工作模式,分別為運(yùn)行、待機(jī)和自動(dòng).所謂自動(dòng)即自動(dòng)受控運(yùn)行,當(dāng)船舶上的航向或跟蹤控制系統(tǒng)運(yùn)行時(shí),可自動(dòng)停止運(yùn)行BNWAS;而在船舶上的航向或跟蹤控制系統(tǒng)停止工作時(shí),自動(dòng)運(yùn)行BNWAS.
BNWAS 指示和報(bào)警的運(yùn)行順序見圖1.圖中Tdx為選擇的休眠期.
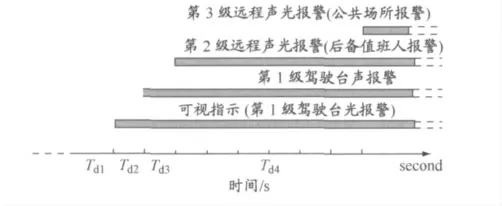
圖1 BNWAS 指示和報(bào)警的運(yùn)行順序
圖1中,當(dāng)BNWAS 處在運(yùn)行狀態(tài),被復(fù)位后維持3~12 min 的休眠期(Td1),在該休眠期結(jié)束時(shí),報(bào)警系統(tǒng)將觸發(fā)置于駕駛臺(tái)的可視指示(即第1 級光報(bào)警).
BNWAS 在該可視指示觸發(fā)15 s(Td2)后在駕駛臺(tái)發(fā)出第1 級聲報(bào)警.第1 級聲報(bào)警旨在提醒OOW,設(shè)計(jì)中讓聲報(bào)警具有音量漸響和聲調(diào)調(diào)節(jié)特性,使OOW 在不受到驚嚇的情況下得到提醒.該報(bào)警聲能在駕駛室OOW 合理預(yù)期應(yīng)處于的所有操作位置聽到.如果第1 級聲報(bào)警15 s(Td3)后還沒有被應(yīng)答(復(fù)位),則在后備值班員處再發(fā)出第2 級聲光報(bào)警,后備值班員包括船長或其他勝任的值班人員,如大副、二副或三副.如果第2 級聲光報(bào)警后仍沒有被應(yīng)答,90~180 s(Td4)后,系統(tǒng)將在能夠采取正確處置措施的船員場所(公共場所)再發(fā)出第3級遠(yuǎn)程聲光報(bào)警.[2]
2 系統(tǒng)結(jié)構(gòu)
本系統(tǒng)以主控制單元為核心,通過船用電纜連接系統(tǒng)各功能單元,見圖2.
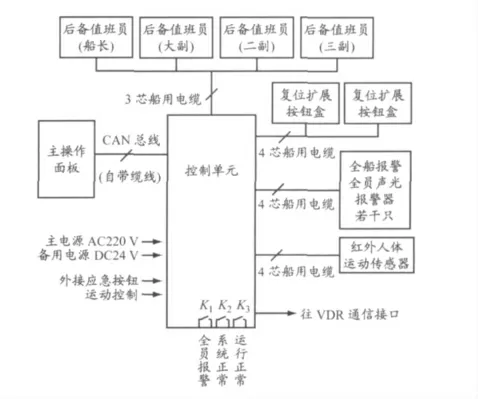
圖2 BNWAS 結(jié)構(gòu)
2.1 主控制單元
主控制單元安裝在駕駛室內(nèi),接有兩路系統(tǒng)電源:分別是主電源AC 110/220 V 及船用蓄電池提供的備用電源DC 24 V,系統(tǒng)具備電源自動(dòng)切換功能.主控制單元除了連接系統(tǒng)各功能單元外還設(shè)有連接船用黑匣子(VDR)通信接口、紅外人體運(yùn)動(dòng)傳感器、延伸應(yīng)急按鈕及運(yùn)行控制等信號(hào)輸入口.
2.2 主操作面板
主操作面板安裝在駕駛室上值班駕駛員伸手可及之處,提供一系列的按鈕和指示燈用于人機(jī)交互.值班員選擇、運(yùn)行狀態(tài)指示、各類報(bào)警燈及計(jì)時(shí)值數(shù)碼顯示表明當(dāng)前的運(yùn)行狀態(tài).此外,面板上配備有[復(fù)位]按鈕和[應(yīng)急呼叫]按鈕,按下[復(fù)位]按鈕系統(tǒng)進(jìn)入休眠期,并重新開始計(jì)時(shí),已發(fā)生的報(bào)警則全部停止;[應(yīng)急呼叫]按鈕按下后直接觸發(fā)第1 級聲光報(bào)警,5 s 后引發(fā)第2 級聲光報(bào)警,繼續(xù)計(jì)時(shí)引發(fā)第3 級聲光報(bào)警.為了防止[應(yīng)急呼叫]按鈕誤操作,還設(shè)計(jì)5 s 后悔期(其間再次按動(dòng)[應(yīng)急呼叫]按鈕可解除應(yīng)急呼叫狀態(tài)).
面板上的鑰匙開關(guān)由船長掌管,用于控制系統(tǒng)啟動(dòng)、停止或?qū)\(yùn)行中的各項(xiàng)參數(shù)進(jìn)行設(shè)定.可設(shè)定的參數(shù)包括當(dāng)前的備用值班員、操作模式、休眠期和聲調(diào)等.設(shè)定后的參數(shù)被存儲(chǔ)記錄在主控制單元的Flash ROM中予以保護(hù).
2.3 復(fù)位擴(kuò)展按鈕盒
復(fù)位擴(kuò)展按鈕盒安裝在與主操作面板有一定距離的駕駛室內(nèi)適合觀察和操作的地方,便于駕駛員在較大面積駕駛室內(nèi)也能就近操作.根據(jù)需要,可選擇配備一到兩只復(fù)位擴(kuò)展按鈕盒,其復(fù)位按鈕和聲光報(bào)警器功能與操作面板相同.
2.4 后備值班員報(bào)警盒和全員聲光報(bào)警器
這些報(bào)警盒(報(bào)警器)分別安裝在4 位后備值班員(船長、大副、二副、三副)房間和公共場所(如會(huì)議室、食堂及公共走道),當(dāng)?shù)? 級報(bào)警發(fā)生時(shí),選定的后備值班員房間的報(bào)警盒將發(fā)出相應(yīng)的警報(bào),而當(dāng)?shù)? 級報(bào)警發(fā)生時(shí)全部報(bào)警單元一起動(dòng)作.
3 系統(tǒng)設(shè)計(jì)
在抗干擾能力、可靠性、安全性等方面船用測控設(shè)備比陸用工業(yè)設(shè)備要求更高,而駕駛室設(shè)備更有其特殊之處.根據(jù)船舶規(guī)范要求必須通過型式認(rèn)可,測試主要包括:系統(tǒng)功能測試以檢驗(yàn)系統(tǒng)的功能要求是否達(dá)標(biāo);電磁兼容性試驗(yàn)包括磁羅經(jīng)安全距離、傳導(dǎo)發(fā)射、靜電放電抗擾度等十幾項(xiàng),用于檢驗(yàn)系統(tǒng)的抗電磁干擾能力,避免系統(tǒng)對外電路實(shí)施干擾;環(huán)境試驗(yàn)和外殼防護(hù)等級試驗(yàn)用于檢驗(yàn)環(huán)境溫度對系統(tǒng)的影響及系統(tǒng)機(jī)械結(jié)構(gòu)是否牢固.[3]
兼顧上述使用性能和電磁兼容及抗干擾能力、系統(tǒng)可靠性、安全性的要求,對系統(tǒng)各部分采取如下有針對性的設(shè)計(jì).
3.1 結(jié)構(gòu)設(shè)計(jì)
由圖2可以看到BNWAS 的控制核心實(shí)際是由主操作面板的人機(jī)交互操作和主控制單元對擴(kuò)展單元的I/O 控制兩部分構(gòu)成的.相對于安裝在金屬殼體內(nèi)的PCB 板卡而言,各部分之間的連接線纜是干擾源的主要輸入途徑,想要提高系統(tǒng)的電磁兼容性能,關(guān)鍵在于電源的抗干擾和各部分連接線的光電隔離.本設(shè)計(jì)放棄傳統(tǒng)的易受電磁干擾影響的信號(hào)線連接方式,采用主、副CPU 硬件結(jié)構(gòu),兩者之間采用光電隔離的CAN 現(xiàn)場總線相連接.
主操作面板中的CPU為副CPU,其功能主要是人機(jī)對話:把采集面板上按鍵及鎖開關(guān)狀態(tài)送往主CPU,同時(shí)根據(jù)接收到的主CPU 發(fā)來的信息進(jìn)行各項(xiàng)顯示和報(bào)警.副CPU 還不斷檢測CAN 總線狀態(tài)及按鍵狀態(tài),當(dāng)總線異常或按鍵長時(shí)間不應(yīng)有的接觸時(shí)發(fā)出報(bào)警.主控制單元中的主CPU 除了與副CPU 交換信息外,主要是根據(jù)BNWAS 的報(bào)警運(yùn)行順序進(jìn)行報(bào)警輸出處理和對系統(tǒng)運(yùn)行狀態(tài)的檢測,并按通信協(xié)議標(biāo)準(zhǔn)把有關(guān)信息隨時(shí)發(fā)往其他船用設(shè)備(例如VDR).
主CPU 選用NXP 公司的ARM7 TDMI-S 核單片機(jī)LPC2368,該芯片功能強(qiáng)大、集成度高,并可提供多達(dá)4個(gè)串口、IrDA 接口、USB Device 接口、2個(gè)CAN-bus 接口、SD/MMC 卡接口、MODEM 接口、以太網(wǎng)接口等.[5]根據(jù)需要,本系統(tǒng)使用其局部功能,見圖3.
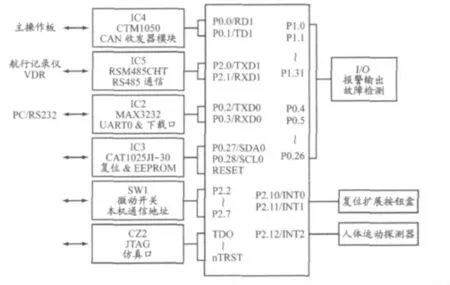
圖3 主CPU 接口分配框圖
單片機(jī)LPC2368 的RD1/TD1 口接CAN 收發(fā)器用于與主操作面板的輔CPU 通信,而TXD1/RXD1和TXD2/RXD2 兩個(gè)串行口分別接到RSM485CHT和MAX3232 電平轉(zhuǎn)換芯片.前者為帶光電隔離的RS485 通信總線接口,用于連接航行記錄儀或其他外設(shè);后者為RS232 通信接口,可作為近距離PC 機(jī)通信或作為下載口使用.[6]復(fù)位電路使用帶Flash存儲(chǔ)器的電源監(jiān)控芯片CAT1025JI-30,在提高系統(tǒng)可靠性的同時(shí)保存設(shè)置的參數(shù).INT0/INT1和INT2中斷口分別用于遠(yuǎn)程復(fù)位信號(hào)和(紅外)人體運(yùn)動(dòng)探測器信號(hào),當(dāng)系統(tǒng)接收到復(fù)位脈沖時(shí)觸發(fā)一段復(fù)位處理程序,系統(tǒng)進(jìn)入休眠期,重新開始計(jì)時(shí).
3.2 現(xiàn)場總線
現(xiàn)場總線技術(shù)是當(dāng)前自動(dòng)化技術(shù)的熱點(diǎn)之一.作為符合國際標(biāo)準(zhǔn)的現(xiàn)場總線之一,CAN-bus 已在世界范圍內(nèi)獲得廣泛應(yīng)用.
本系統(tǒng)的主、副CPU 之間使用CAN 總線連接.所選用的CPU 單片機(jī)LPC2368 其自身集成一個(gè)完整的CAN(遵循CAN 規(guī)范V2.0B 協(xié)議)控制器,具有強(qiáng)大的診斷監(jiān)控功能,并在很大程度上簡化器件編制難度.考慮到現(xiàn)場電磁環(huán)境的復(fù)雜性,為確保通信可靠,選用CTM1050 作為本系統(tǒng)的CAN 收發(fā)器芯片.CTM1050是一款帶隔離的高速CAN 收發(fā)器模塊,該模塊內(nèi)部集成了所有必需的CAN 隔離及CAN 收、發(fā)器件,模塊的主要功能是將CAN 控制器的邏輯電平轉(zhuǎn)換為CAN 總線的差分電平并且具有DC 2 500 V的隔離功能.該芯片還有電磁輻射EME低、電磁抗干擾EMI 性高和高低溫特性好的特點(diǎn),能滿足工業(yè)級產(chǎn)品技術(shù)要求.[7]
具體的主控單元和操作面板連接見圖4.主、副CPU 芯片LPC2378 的RD1和TD1 口分別接到各自的CTM1050 收發(fā)器芯片上,并在輸出口CANH和CANL 之間配備可選用的120 Ω 終端阻抗匹配電阻,而收發(fā)器的屏蔽地則通過1M 電阻和103 pF 電容接外殼地,兩個(gè)CPU 之間使用帶屏蔽的通信電纜相連,通信電纜屏蔽層同樣接外殼地.在現(xiàn)場安裝時(shí)要求所有的外殼地必須使用3 mm2以上的專用接地線與船殼連接以獲得最佳的電磁屏蔽效果.[8]
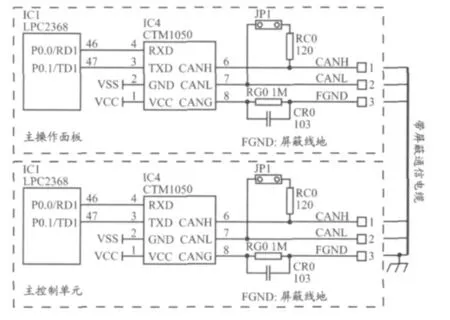
圖4 主控單元和操作面板連接
在應(yīng)用層協(xié)議方面,本系統(tǒng)選用近來國內(nèi)常用的iCAN(Industry CAN-bus Application Protocol)協(xié)議,是現(xiàn)場總線CAN-bus 的最新應(yīng)用層協(xié)議之一,具有理解簡單、易于實(shí)現(xiàn)、實(shí)時(shí)可靠的特點(diǎn).iCAN 協(xié)議采用與CANopen和DeviceNet 協(xié)議基本相同的連接管理方式,刪除比較復(fù)雜的握手管理、資源分配等內(nèi)容,并使用預(yù)定義數(shù)據(jù)組合的方式管理CAN-bus總線上的節(jié)點(diǎn).定稿的iCAN 協(xié)議雖然只有DeviceNet 協(xié)議完整內(nèi)容的1/10,但實(shí)現(xiàn)的iCAN 網(wǎng)絡(luò)卻比DeviceNet 網(wǎng)絡(luò)的規(guī)模大,適應(yīng)面比較廣泛,應(yīng)用方式也非常靈活,尤其適合各種不同工業(yè)環(huán)境條件中的分布式數(shù)據(jù)控制網(wǎng)絡(luò).[4]
一個(gè)典型的CAN 數(shù)據(jù)幀由幀信息、幀ID和幀數(shù)據(jù)組成.為方便起見,程序中接收和發(fā)送的數(shù)據(jù)都用一幀(CANINFO 結(jié)構(gòu)體)表示.
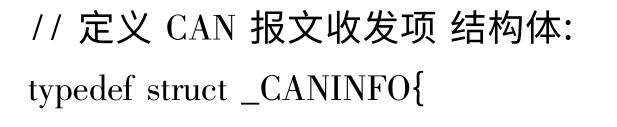
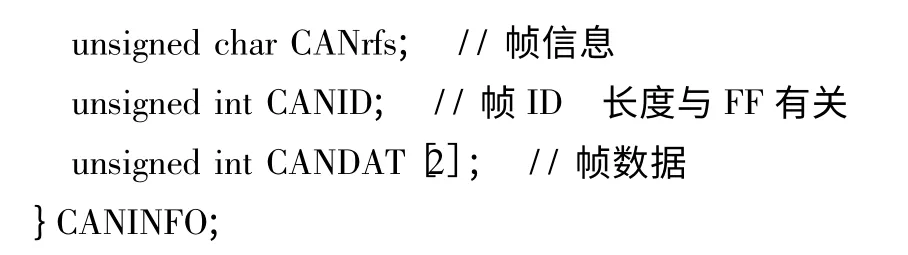

表1 CAN 標(biāo)準(zhǔn)幀結(jié)構(gòu)
CANDAT為數(shù)據(jù)幀的數(shù)據(jù)區(qū),每幀可收發(fā)8 字節(jié)數(shù)據(jù),見表2.

表2 CANDAT 每幀發(fā)送的數(shù)據(jù)
3.3 電源和信號(hào)
本系統(tǒng)共有兩路供電電源,分別來自船用發(fā)電機(jī)的主電源AC 110/220 V 及來自船用蓄電池的備用電源DC 24 V,要求系統(tǒng)對兩路電源進(jìn)行監(jiān)控并有自動(dòng)切換功能,當(dāng)任一電源停止供給時(shí)系統(tǒng)會(huì)發(fā)出相應(yīng)的報(bào)警提示.除了以上的供電保障功能要求外,船舶規(guī)范要求一系列電磁兼容性試驗(yàn)大多與電源相關(guān),大致也可分為3 類:本系統(tǒng)通過電源導(dǎo)線對其他船用設(shè)備的干擾;模擬其他船用設(shè)備通過電源和信號(hào)線對本系統(tǒng)的影響;模擬雷擊、斷電、電源倒置、電壓異常波動(dòng)等情況.
兼顧各方面要求,系統(tǒng)電源電路設(shè)計(jì)增加相應(yīng)措施,見圖5.主電源AC 110/220 V 及備用電源DC 24 V分別先經(jīng)抗干擾濾波器后接入系統(tǒng),經(jīng)由電源自動(dòng)切換組件到達(dá)主控制單元.主控制單元電源入口處并聯(lián)一個(gè)瞬態(tài)抑制二極管ZIN1.ZIN1是一種雙向瞬態(tài)電壓抑制二極管,用該器件吸收尖峰高壓有很好的效果.而二極管VDIN1 用于限制電源的導(dǎo)通方向,經(jīng)過L1,C1,C2 濾波,然后通過DC/DC 模塊將電源隔離并穩(wěn)壓至5 V,專給CPU 及其接口芯片供電.本系統(tǒng)選用的DC/DC 模塊具有輸入電壓范圍大、輸出過流保護(hù)、輸出過壓保護(hù)、輸出電壓精度高等功能.為了降低噪聲和干擾,還將模擬電路的電源與數(shù)字電路的電源高頻噪聲進(jìn)行隔離,圖5中的L2,L3 及C5,C6 等就是用于電源高頻隔離的元件.
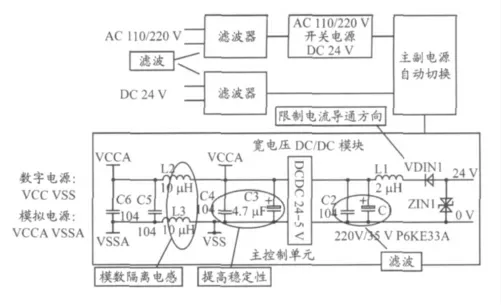
圖5 系統(tǒng)電源框圖
3.4 系統(tǒng)自檢和故障報(bào)警
這是船用測控設(shè)備的高可靠性重要體現(xiàn).為提高BNWAS 的抗干擾能力及可靠性,設(shè)計(jì)系統(tǒng)硬件時(shí),主控制單元與外部擴(kuò)展配件間的線路全部采用光電隔離,并設(shè)置斷線檢測的回路.系統(tǒng)根據(jù)光電耦合器的工作電流特性,利用穩(wěn)壓二極管擊穿前電流微小、擊穿后穩(wěn)壓的特點(diǎn),來很好地解決外電路與主機(jī)之間既有電隔離又必須有外回路斷線檢測的難題.典型的接口電路見圖6.
圖6 [復(fù)位擴(kuò)展按鈕盒]與主機(jī)的接口電路
圖6中,INT1和INT2 分別是檢測斷線信號(hào)和按鍵信號(hào)輸入口,OUT1和OUT2 分別是聲光報(bào)警信號(hào)輸出口.左側(cè)為[復(fù)位擴(kuò)展按鈕盒]內(nèi)電路,右側(cè)為主控制單元電路.
當(dāng)復(fù)位鍵RST 未被按下時(shí),斷線檢測電流從+24 V電源經(jīng)LI1(LED 指示燈)(光電耦合器GL1輸入端(RI1(DI1(LR1(RR1(VSS,回路電流IG10約為

式中:LI1,LR1 與GL1 的輸入LED 管電壓降均約1.6 V,而DI1 電壓降為0.7 V.
具體表現(xiàn)在對單位實(shí)施內(nèi)部控制的重要性和意義認(rèn)識(shí)不足,認(rèn)為內(nèi)控把簡單的事情復(fù)雜化,相關(guān)內(nèi)控制度流于形式,缺乏可操作性。從而在實(shí)際工作中,僅認(rèn)為財(cái)會(huì)人員工作就是收收付付,而沒有參與單位的決策業(yè)務(wù)工作。財(cái)會(huì)人員無法提供相應(yīng)的專業(yè)的意見和建議,無法為降低單位財(cái)務(wù)風(fēng)險(xiǎn)提供決策參考。
使光電耦合器GL1 輸出管導(dǎo)通,INT0 輸出低電平,通電指示燈(兼按鈕夜間照明)LR1 亮;如果接口電路斷開,此回路斷路,通電指示燈LR1 滅,GL1輸入端回路因斷路而無電流通過,輸出管截止,INT0 出現(xiàn)高電平表明接口電路斷線.

此回路正常狀態(tài)下a,b 兩點(diǎn)間電壓由于Vab約為8.4 V,光電耦合器GL2 回路上穩(wěn)壓二極管Z1(9 V)的串入,不能擊穿,光電耦合器GL2,輸入端無電流(極小電流)通過,INT1為高電平.
當(dāng)按鍵按下后,由于按鍵短路LR1和RR1,Vab=24 V-0.7 V=23.3 V,穩(wěn)壓二極管Z1 擊穿后穩(wěn)壓于9 V,按鍵電流從+24 V 經(jīng)Z1→LI2(按鍵指示燈)→光電耦合器GL2 輸入端→RI2→DI1→按鍵→VSS,光電耦合器GL2 輸入電流.

光電耦合器GL2 輸出管導(dǎo)通,INT1為低電平,表明按鍵按下,回路電阻的選擇保證此時(shí)光電耦合器GL1 的輸入電流應(yīng)在工作電流范圍內(nèi):

光報(bào)警信號(hào)由OUT2 輸出,經(jīng)光電耦合器GL3輸出使LG1 亮,實(shí)現(xiàn)光報(bào)警輸出.當(dāng)系統(tǒng)未接此[復(fù)位擴(kuò)展按鈕盒]時(shí),可把JP1 短接,使主控制單元不會(huì)因此產(chǎn)生不應(yīng)有的斷線故障信號(hào).
3.5 紅外人體運(yùn)動(dòng)傳感器
為了簡化駕駛?cè)藛T的操作,系統(tǒng)還配備紅外人體運(yùn)動(dòng)傳感器復(fù)位信號(hào)輸入接口,當(dāng)有人員在駕駛室正常活動(dòng)時(shí),傳感器對系統(tǒng)自動(dòng)產(chǎn)生復(fù)位請求.
紅外人體運(yùn)動(dòng)傳感器無論是采用BOSCH 公司的DS936 型,還是DS939 型或DS940T 型,輸出信號(hào)完全一樣,工作模式均為:通電預(yù)熱50 s 后,若未檢測到人體運(yùn)動(dòng),其輸出觸點(diǎn)閉合;若檢測到人體運(yùn)動(dòng),其輸出觸點(diǎn)斷開;若檢測到持續(xù)有人體運(yùn)動(dòng),其輸出觸點(diǎn)斷開但每隔5 s 閉合1 s.
若系統(tǒng)只外接一只紅外人體運(yùn)動(dòng)傳感器,則可把傳感器輸出觸點(diǎn)一端接地,另一端接上拉電阻后由單片機(jī)LPC2368中斷口INT2 口輸入:那么INT2口為低電平(觸點(diǎn)閉合)傳感器工作正常,監(jiān)測區(qū)無人活動(dòng);INT2 口為高電平,但每5 s 下降到低電平1 s則是持續(xù)有人體運(yùn)動(dòng);INT2 長時(shí)間(大于5 s)持續(xù)處在高電平則是斷路故障(因?yàn)閭鞲衅鲾嗑€時(shí)輸入信號(hào)線懸空).本系統(tǒng)充分利用單片微機(jī)INT2 口的輸入特性(即輸入信號(hào)持續(xù)為高或低電平不變時(shí)不會(huì)產(chǎn)生中斷信號(hào),但仍可讀取的接口電平),用INT2 口的下降沿觸發(fā)中斷對系統(tǒng)自動(dòng)產(chǎn)生復(fù)位請求,10 s(大于5 s)內(nèi)讀取的INT2 口電平始終為高電平則是斷路故障,使傳感器輸出信號(hào)與CPU 獲得恰到好處的配合.
在大型船舶上,一只紅外人體運(yùn)動(dòng)傳感器無法覆蓋較大的駕駛室,為了節(jié)省CPU 的I/O 接口和軟件開支,用多個(gè)傳感器時(shí)采用觸點(diǎn)串聯(lián)方法,傳感器觸點(diǎn)信號(hào)輸入前附加少量預(yù)處理電路:在任意一只傳感器輸出觸點(diǎn)從斷開態(tài)轉(zhuǎn)向閉合的瞬間,該電路可在CPU 的INT2 口產(chǎn)生負(fù)脈沖,而且可在任意一只傳感器斷線故障時(shí)在該口上獲得故障信息.
多個(gè)運(yùn)動(dòng)傳感器的接口電路見圖7.在圖7中假定系統(tǒng)應(yīng)用4 只紅外人體運(yùn)動(dòng)傳感器PM1~PM4,它們的4個(gè)輸出觸點(diǎn)PK1~PK4 串聯(lián)在輸入觸點(diǎn)回路上,用LM317和RJ1 組成10 mA 恒流源向傳感器觸點(diǎn)回路供電,當(dāng)4個(gè)輸出觸點(diǎn)處于某種穩(wěn)定狀態(tài)(或某幾個(gè)斷開、某幾個(gè)閉合)時(shí),Va值由流過電阻RP1,RP2,RP3和RP4中的某幾個(gè)(觸點(diǎn)閉合的被短路)的電壓降值確定,而Vb=12 V·RJ3/(RJ2 +RJ3)≈1 V,c 點(diǎn)電壓為Va與Vb的分壓值,被電容CJ1 保持.出現(xiàn)以下情況會(huì)使CPU 的INT2口得到相應(yīng)的電平或負(fù)脈沖信號(hào):
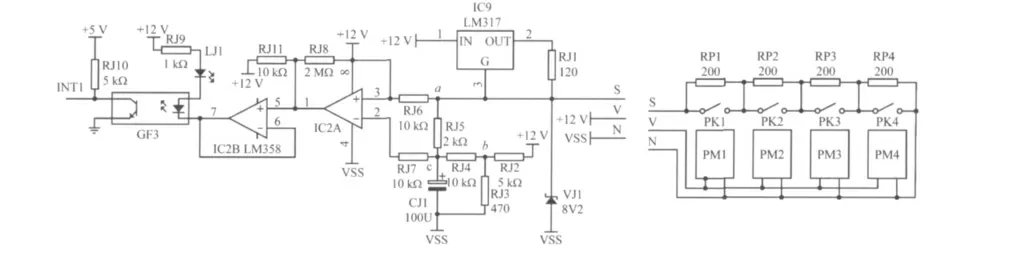
圖7 紅外人體運(yùn)動(dòng)傳感器接口
(1)傳感器電路斷線.Va被穩(wěn)壓二極管限壓在9 V,那么Va>Vc>Vb.經(jīng)運(yùn)算放大器IC2A 比較后,由IC2B 跟隨器輸出高電平,LJ1 滅,INT2 持續(xù)處在高電平而且無下降沿,則為斷路故障.
(2)傳感器電路接線正常,而監(jiān)測區(qū)無人活動(dòng)時(shí),全部傳感器輸出觸點(diǎn)閉合,Va=0 V,則Va<Vc<Vb.經(jīng)運(yùn)算放大器IC2A 比較后,由IC2B 跟隨器輸出低電平,LJ1 閃亮,INT2 持續(xù)處在低電平.
(3)監(jiān)測區(qū)有人活動(dòng)時(shí),某個(gè)傳感器輸出觸點(diǎn)處于斷開狀態(tài),并且每隔約5 s 閉合一下,由于閉合瞬間Vc不會(huì)突變,Va產(chǎn)生2 V(10 mA ×200 Ω)的壓降,使得Va瞬間小于Vc.經(jīng)運(yùn)算放大器IC2A 比較后,由IC2B 跟隨器輸出低電平脈沖,LJ1 閃亮,INT2 也輸入低電平脈沖,觸發(fā)單片機(jī)產(chǎn)生中斷使BNWAS 復(fù)位.
上述附加電路巧妙地利用電容的電壓不能突變,以保持原有幾個(gè)傳感器輸出觸點(diǎn)閉合時(shí)的狀態(tài)電壓,當(dāng)某個(gè)傳感器輸出觸點(diǎn)由斷開狀態(tài)轉(zhuǎn)向閉合時(shí),運(yùn)算放大器兩輸入端瞬間產(chǎn)生差壓,經(jīng)比較輸出低電平脈沖,以獲得CPU 所需負(fù)脈沖信號(hào),可解決多個(gè)傳感器只需一個(gè)輸入中斷口INT2 的難題.
3.6 軟件流程圖(報(bào)警處理和時(shí)間精度)
MSC.128(75)決議對系統(tǒng)時(shí)間精度作了明確要求:“在使用情況下,報(bào)警系統(tǒng)應(yīng)當(dāng)能達(dá)到4.1.2 節(jié)中規(guī)定的計(jì)時(shí)要求:其精度為5%或5 s,以較小為好.”[1]本系統(tǒng)中,主CPU 程序的最主要程序是定時(shí)程序,主CPU 定時(shí)器每50 ms中斷一次,除執(zhí)行其他定時(shí)操作外,根據(jù)BNWAS 的不同計(jì)時(shí)階段散轉(zhuǎn),進(jìn)行計(jì)時(shí)后作出判斷,并作相應(yīng)處理.圖8為主CPU定時(shí)程序主要流程.
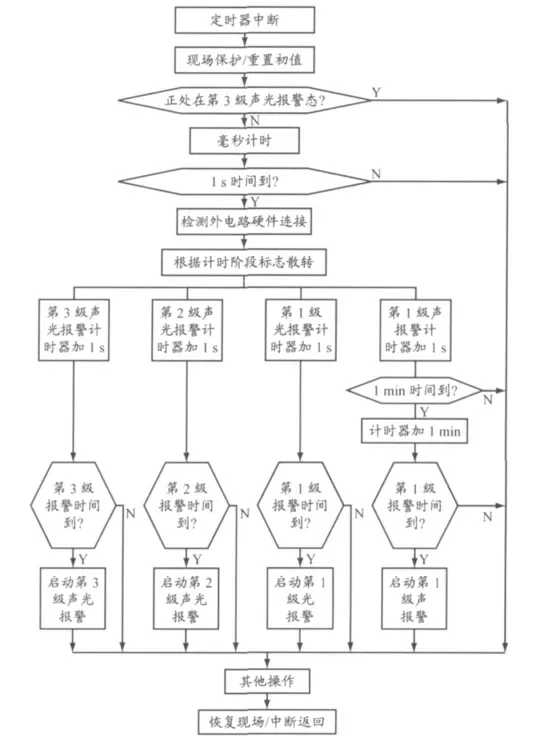
圖8 主CPU 定時(shí)程序流程
4 結(jié)束語
所設(shè)計(jì)的BNWAS 在軟件配合下,硬件上采取主、副CPU 結(jié)構(gòu),CAN 現(xiàn)場總線,電源設(shè)計(jì)和外部配件的光電隔離及故障檢測,不但具有較高的抗干擾能力、可靠性及安全性,而且功能完善.
[1]IMO RESOLUTION MSC.128(75).Performance standards for a Bridge Navigational Watch Alarm System (BNWAS)[S].IMO:20 May 2002.
[2]IMO RESOLUTION A.1021(26).Code on alerts and indicators[S].IMO:18 January 2010.
[3]IEC 62616.Maritime navigation and radio communication equipment and systems-bridge navigational watch alarm system[S].IEC:2010(E).
[4]周立功.ICAN 現(xiàn)場總線原理與應(yīng)用[M].北京:北京航空航天大學(xué)出版社,2007.
[5]周立功.ARM 嵌入式系統(tǒng)基礎(chǔ)教程[M].北京:北京航空航天大學(xué)出版社,2008.
[6]鐘鳴泉,黃學(xué)武,鄭華耀.基于ARM 微處理器的多串口多協(xié)議網(wǎng)關(guān)設(shè)備設(shè)計(jì)[J].上海海事大學(xué)學(xué)報(bào),2008,29(1):62-66.
[7]毛興武.新型電子元器件及其應(yīng)用技術(shù)[M].北京:中國電力出版社,2010.
[8]夏永明,孔凡花,王洋,等.船用智能同步檢測、指示、控制儀表[J].上海海事大學(xué)學(xué)報(bào),2010,31(4):40-44.
猜你喜歡
青少年科技創(chuàng)新報(bào)(2024年23期)2024-07-12 00:00:00
中學(xué)生天地(A版)(2022年10期)2022-11-23 06:42:50
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
奧秘(創(chuàng)新大賽)(2019年12期)2019-11-29 18:26:17
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
少年文藝·我愛寫作文(2017年6期)2017-06-12 23:21:56
