車路集成環境下BRT專用道時分復用的車路協作方法研究
2012-07-07 02:11:28董紅召劉冬旭郭明飛
中國工程科學 2012年7期
關鍵詞:區域
董紅召,凌 越,劉冬旭,郭明飛
(1.浙江工業大學智能交通系統聯合研究,杭州310014;2.浙江工業大學特種裝備制造與先進加工技術教育部/浙江省重點實驗室,杭州310014)
1 前言
快速公交(bus rapid transit,BRT)專用道是BRT高效運行的重要因素,BRT專用道(下面簡稱“專用道”)在無BRT車輛行駛的時間段內出現了間歇性閑置。在車路集成環境支持下,可以通過車輛協作方式實現在專用道路權的動態配置,提高專用道的利用率。
車路集成環境是指車載信息采集終端和路邊設備實時通信,構建人車路一體的車聯信息網絡環境[1,2]。美國交通部于2005年智能交通白皮書中首先提出車路集成環境構架計劃,隨后加州大學等研究機構展開了智能信息集成、車路無線通信等車路集成環境相關領域的技術研究[3,4]。
目前國內外對于車路協作及車輛協作方法在車輛防碰撞和安全預警等領域研究較多[5]。目前關于專用道路權配置問題的研究主要集中在專用道間歇式路權實現方面,里斯本大學的 José Viegas等首先提出了間歇式公交優先道方法,該方法通過動態改變普通車道路權實現公交車輛間歇性獨享路權[6,7]。之后加州大學交通研究所 Michael Eichler等人研究采用可變信息板的間歇路權優先公交專用道使用方法[8]。這些方法缺少車輛運行狀態與道路交通信息,不能生成準確有效的路權配置策略,無法實現車輛與道路的動態協作。
因此,文章在車路集成環境下,通過采集車輛及道路實時信息,通過對BRT車輛行程時間和車輛換道協作時間模型的研究,實現車路協作支持下的專用道時分復用。
2 時分復用車路協作方法和控制策略
2.1 車路集成環境下專用道的車路協作機制
專用道時分復用方法是在車-路、車-車通信環境下,根據BRT車輛的定位信息、行駛路線信息和交通流信息,在專用道閑置時段,通過車輛協作終端或者專用信號燈來控制社會車輛對專用道的借道使用。
目前BRT車輛獨享專用道的路權,而專用道的時分復用方法對專用道路權劃分了不同的使用等級,BRT車輛使用專用道優先權最高、定義為高路權等級車輛,普通公交車次之,最后是社會車輛。在專用道時分復用過程中,當高等級路權的車輛未迫近專用道時,低路權等級的車輛(除BRT車輛外的“普通車輛”)允許駛入專用道內,稱為借道協作;當低路權等級車輛從專用道向鄰道換道時,稱為還道協作。
為了描述專用道車輛協作的時間和空間尺度,這里引入時間片和空間片概念,時間片是指在某專用道區域對低路權等級車輛開放路權的時間段,空間片是指向其他車輛開放路權的連續的專用道區域,因此僅在時間片和空間片內,普通車輛才可以進行借道協作實現專用道復用。車輛通過車載協作終端感知當前車輛位置所在的時間片和空間片信息,同時,建設路邊設備,在專用道路邊以一定間隔距離設置信號燈,每盞信號燈指示在燈后的間隔區域的時間片和空間片信息,依托車輛與路邊設備的協作,行駛獲取時間片和空間片信息。
專用道時分復用的車路集成環境由車輛信息、道路交通信息、專用道時分復用信息組成。通過車載定位傳感設備采集車輛數據,包括BRT車輛位置、速度、站點停靠時間數據,以及普通車輛的速度、加速度、航向角、車車間橫縱間距。車載協作終端與路邊設備建立無線通信鏈路,獲取道路交通流和信號配時信息。圖1為車路集成環境下BRT專用道時分復用的車輛及車路協作構架。
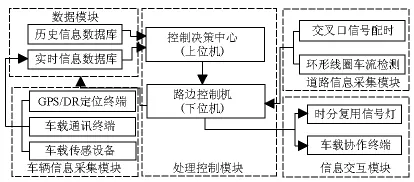
圖1 車路集成環境下專用道時分復用的車輛協作構架Fig.1 Vehicle-Road collaboration frame of TDM based on Vehicle-Infrastructure Integration
2.2 專用道時分復用的時間片和空間片劃分策略
以交叉口為節點將專用道分段,以段為單位分析專用道不同位置的交通流和行駛規則,將專用道分為上游交叉口區、專用道主區域、下游交叉口區域,在每個區域首和尾分別設置借道區和還道區,規定車輛在借還道區內完成借還協作。因為這些區域內專用道在任何時間內的路權開放等級相同,所以空間片是3區域的連續的動態組合。圖2為專用道區域劃分示意圖。
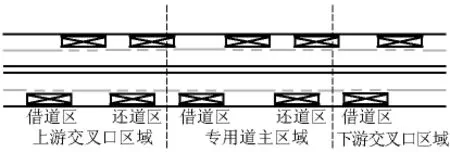
圖2 BRT專用道區域劃分示意圖Fig.2 Area division of the BRT-lane
上游交叉口區域定義從交叉口進口道起始的100~200 m內的專用道區域。如圖3所示,為上游交叉口區域的時分復用控制策略,其中Sbus為BRT車輛與借道區之間距離,這里迫近區域定義為距借道區的行程時間小于TR的專用道區域,搜索區域定義為距借道區的行程時間小于TR+TST的專用道區域。
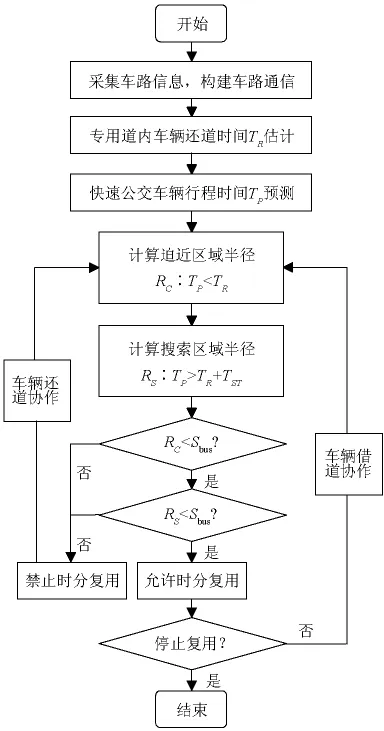
圖3 上游交叉口區域時分復用協作控制策略流程Fig.3 Control strategy flow of the up cross area
在信號周期T內,初始狀態為禁止專用道復用狀態,當BRT車輛駛離迫近區域且沒有其余BRT車輛進入搜索區域時,開啟專用道時分復用,當BRT車輛進入迫近區域后結束復用,專用道時分復用的時間片的計算公式為:

式(1)中:Tucross為一個時分復用信號周期內的時間片,只有滿足Tucross>TST時才分配時間片,s;CR為借還時間安全系數,無量綱;TST為允許時分復用的最短時間段(最小時間片),s。
專用道主區域介于上游交叉口區域之間,該區域的時間片的片長與上游交叉口區域時間片一致,時間片相位則延遲,延時時間的計算公式為:

式(2)中:VBRT為BRT車輛行駛速度,m/s;Cb為延遲時間路況影響系數,無量綱;lip為上游交叉口區域專用道路程,m。
下游交叉口區域是指從交叉口渠化段到前50~100 m的專用道區域。由于該區域車流密度大,換道情況復雜,因此以交叉口充當換道區避免車輛在渠化段內換道引發沖突。下游交叉口區域的時間片計算公式為:

式(3)中:Tdown-cross為時分復用周期內的下游交叉口時間片,滿足Tdown-cross> TTC,s;Cs為交叉口排隊長度指數,為交叉口排隊長度與專用道路程的比值,無量綱。
3 BRT車輛行程時間的預測
BRT車輛行程時間是劃分專用道時分復用時間片和空間片的依據。通過實時采集BRT車輛運行數據,以歷史信息為參考,預測BRT車輛行程時間。
3.1 BRT車輛定位數據處理
BRT車輛定位數據誤差將影響BRT行程時間預測的準確性,采用路徑匹配算法對BRT車輛定位數據進行誤差修正。路徑匹配是將車載定位終端采集的BRT車輛位置信息與BRT行駛的專用道路徑匹配,以專用道位置信息為參照消除定位誤差。首先,建立平面幾何坐標下的專用道線段方程,以始發站位置作為初始定位點,終端以采樣時間tsa采集BRT車輛運行中定位數據。然后取修正后得到定位點n-1的位置,n-1的位置在專用道線段上,從n-1出發沿線段方向行駛,經時間tsa后,估計車輛在線段上的位置區域dn。假設系統定位誤差為r,以修正前的第n點位置為中心,半徑為r的區域為定位誤差范圍,計算誤差范圍內專用道線段de。最后,de和dn取交集得到線段dp,取dp中點為修正后n定位點位置,修正后n定位點坐標計算公式為:

3.2 BRT行程時間預測模型的建立
根據BRT車輛運行規律,分析行程時間構成因素,BRT車輛行程時間受站點乘客人數、交叉口通行狀態、行駛速度等條件影響。如圖4所示,以交叉口和站點為節點,將BRT行程時間劃分為節點停留時間和節點間行程時間,節點停留時間由交叉口行程時間和站點停靠時間組成。BRT行程時間計算公式為:

式(5)中:TSn為站點停靠時間,s;TRn為節點間行程時間,s;TCn為交叉口行程時間,s。

圖4 專用道節點分段示意圖Fig.4 The subsection on the rapid BRT -lane
BRT車輛節點間行程行駛不受鄰道交通流影響,速度變化相對穩定,統計每段節點之間的歷史行程時間,通過時間變化趨勢預測目前節點間行程時間。
站點停靠時間由上下車乘客人數決定,當到站乘客符合泊松分布時,站點停靠時間預測模型為:

BRT車輛接近交叉口時,路邊交叉口信號設備獲取BRT車輛的位置信息,通過提前BRT行駛方向的信號相位或者延長該相位時間的信號協作方法,減少BRT車輛在交叉口的延誤。交叉口行程時間由交叉口信號配時和排隊長度決定,車輛通過交叉口分為兩種方式:一種是車輛不停車通過交叉口,行程時間設為;第二種是車輛等待通行相位然后通過交叉口,行程時間設為。在城市交通信號系統中獲取專用道交叉口當前相位,該相位剩余時間,相位時間等信息,計算不同方式下車輛經過交叉口的時間公式如下:
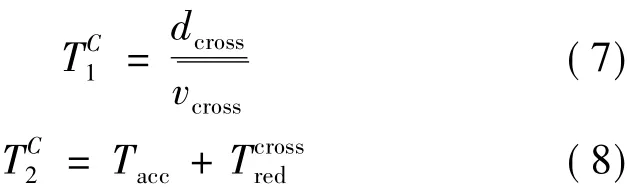
式(7)和式(8)中:dcross為交叉口進出口道距離,m;為車輛通過交叉口平均速度,m/s;Tacc為車輛在啟停加速模式下通過交叉口時間,s;為等待信號相位時間,s。
4 車輛借還專用道的換道時間模型
車輛借還專用道的換道過程是指車輛在借道區換道進入專用道和在還道區向鄰道換道的駕駛行為。專用時分復用的車輛換道過程是換道車輛和鄰道車輛間協作完成的,當車輛在換道區進行換道前,將換道提示信息通過車-車通信網絡向鄰道及周圍車輛發布,周圍車輛的車載協作終端接受到換道消息后且自身車輛處于換道區的鄰道上游時,則通過減速來預留出換道空間的方式協助換道車輛進行換道。同時,車輛接收到當前時間片和空間信息,判斷前方的換道區是否允許車輛換道,若允許則提前做協助車輛換道的準備。通過車輛協作方式完成的換道行為增加了換道的成功率,減少了換道時間,同時增加了換道過程的安全性。
車輛換道時間與自身車型、鄰道車輛密度和車速等因素有關。鄰道車輛行駛狀態作為參考,分析車輛換道情況,當鄰道車輛之間的距離大于車輛換道所需空間時可以換道,則車輛密度符合如下關系:

式(9)中:KJ為換道成功車輛密度臨界點,n/m;Llane為該段專用道長度,m;ulc、uhc為換道和鄰道車輛長度當量,m。
當鄰道車輛密度滿足K>KJ時,車輛無法完成換道,必須等待至密度滿足K<KJ時才有換道空間。以車輛密度臨界值KJ為條件,車輛借還專用道的換道時間模型為:
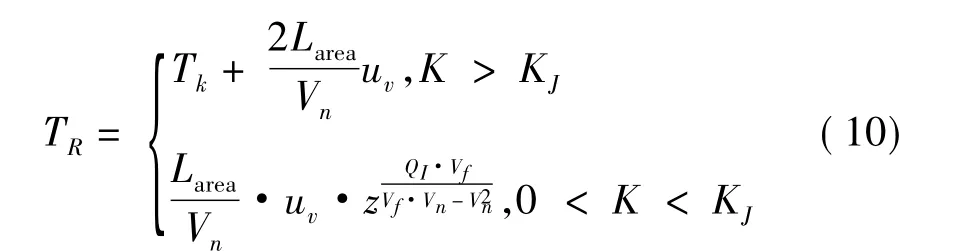
式(10)中:在K>KJ條件下,TR為借道車輛從停止等待到換道成功的時間,s;在0<K<KJ條件下,TR為車輛減速換道行為下的換道時間;Larea為換道區長度,m;QI為鄰道交通流量;Vn為鄰道車速,m/s;Vf為鄰道最高限速,m/s;uv為車型系數,無量綱;Z為車輛密度參數,無量綱;Tk為鄰道密度消散至小于KJ所用時間,s。
5 實驗結果與數據分析
以杭州BRT一號線(B1線)專用道作為時分復用車輛協作方法的實驗線路,目前 B1線全長28 km,沿線共有15對停靠站和12個干線交叉口,運營車輛超過40輛。
在實驗前首先搭建B1線車輛信息采集系統,在BRT車輛安裝信息采集終端,建立了BRT車輛信息數據中心;采用LED顯示屏顯示專用道信息代替時分復用信號燈,開發時分復用信號控制軟件,建立時分復用信號顯示系統;在實驗車安裝車載雷達、胎壓傳感器、陀螺儀、有源RFID等傳感和通信設備,實現與路邊設備無線通信,構建實驗環境下的車路集成平臺。
在車輛信息采集系統下使用逐秒高頻采樣的方法采集2010年2月B1線車輛行程時間,統計路段、站點、交叉口行程時間,作為歷史行程時間數據。表1為B1線部分站點平均停靠時間統計。
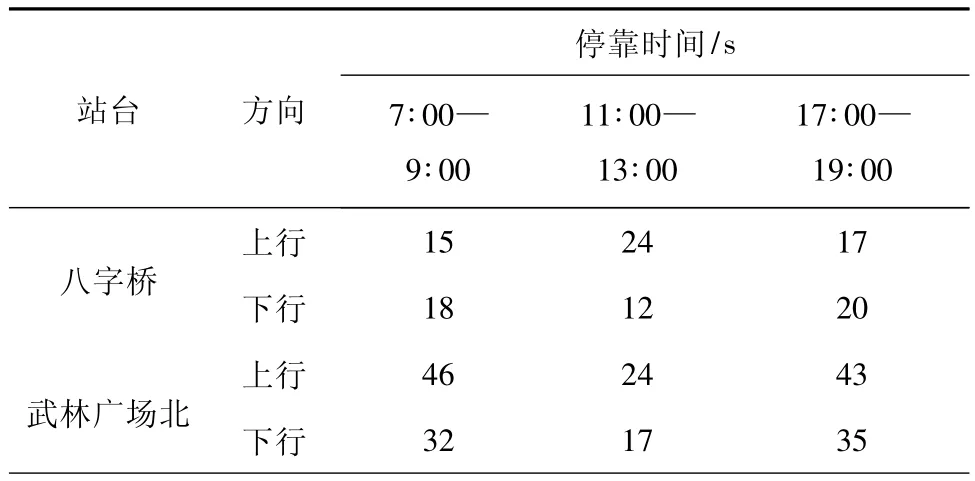
表1 杭州市B1線路部分站點歷史平均停靠時間Table 1 The average historical stop time of parts of stops on the B1 lane in Hangzhou
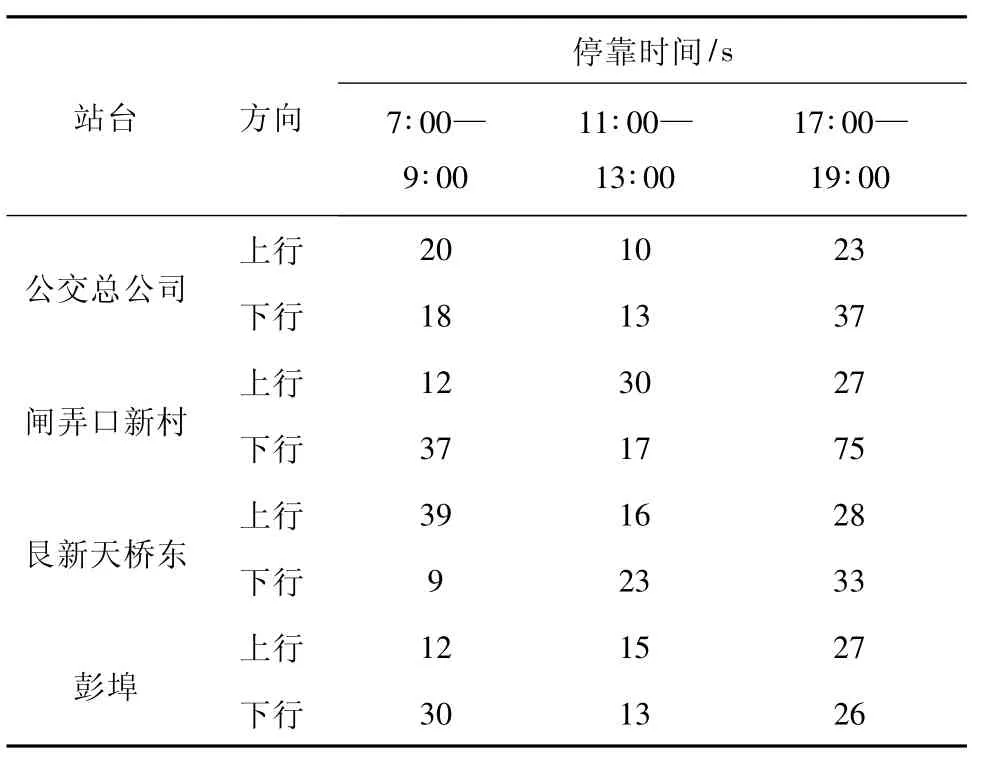
續表
面向專用道時分復用的BRT行程時間預測屬于短時行程時間預測。圖5為杭州BRT一號線車輛在30 min以內行程時間實驗預測值與實際采集值關系,其中,當預測時間小于600 s,預測值與實際值如表2所示,預測時間的誤差不會超過35 s,其誤差率在9%以內。

表2 BRT行程時間預測誤差Table 2 The deviation of predicting the BRT travel time
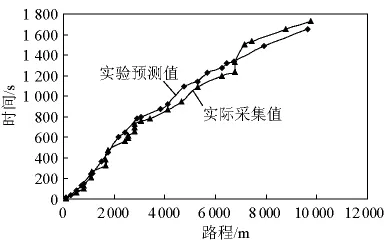
圖5 BRT車輛行程時間實驗預測值與實際采集值關系Fig.5 The relationship of predicted value and actual value of the rapid bus travel time
以車輛從匝道向主車道合流的換道駕駛行為模擬專用道內車輛在還道區域的換道駕駛行為,采集實驗車從匝道口換道時間驗證借道車輛換道時間模型的可靠性。選取杭州上德立交的德勝路西向東進入上塘高架北向南方向的匝道,匝道為單車道,高架主車道為兩車道,匝道口可換道距離為8~10 m。檢測2011年8月12日至13日上午8∶00至12∶00,下午2∶00至19∶00點匝道口的鄰道交通流、車行速度以及實驗車從匝道口進入主車道時間。
圖6為車輛在0<K<KJ時,不同鄰道速度下匝道車輛換道時間和速度的變化關系,在固定車型下,實驗的數據得到擬合曲線符合模型中的鄰道車道車速與換道時間關系,由該擬合曲線確定模型的車輛密度參數z的近似值。
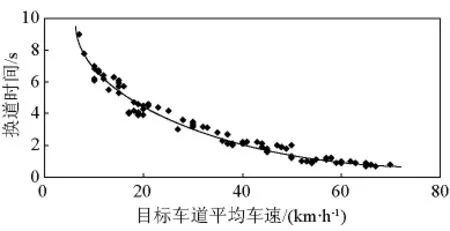
圖6 車輛換道時間與路段車輛速度關系Fig.6 The relationship of vehicle lane-changing time and vehicle speed on the same road
表3為車輛在K>KJ下換道時間統計,表4為不同交通流狀況下模型估計時間與實驗值之間比較,其中鄰道速度小于5 km/h時,視為在K>KJ條件下的換道模式,其誤差為15%。在鄰道速度區間在5~20 km/h下,誤差為13%,鄰道速度越大誤差越小。當車速大于40 km/h時誤差小于10%,一般車輛用于還道的換道時間不超過10 s,每輛車換道時間的估計誤差平均在1 s以內,當借還時間安全系數CR取值大于1.1時即消除誤差影響。
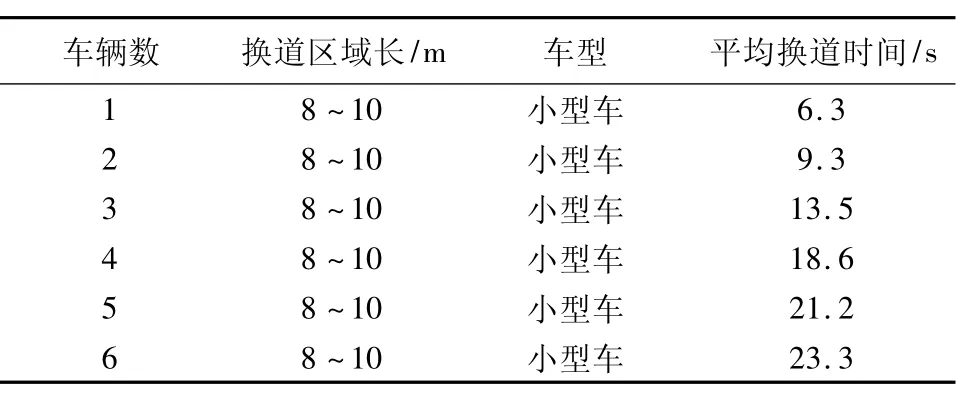
表3 匝道車輛在停啟模式下換道時間Table 3 Lane-changing time of the vehicle under stop-start situation
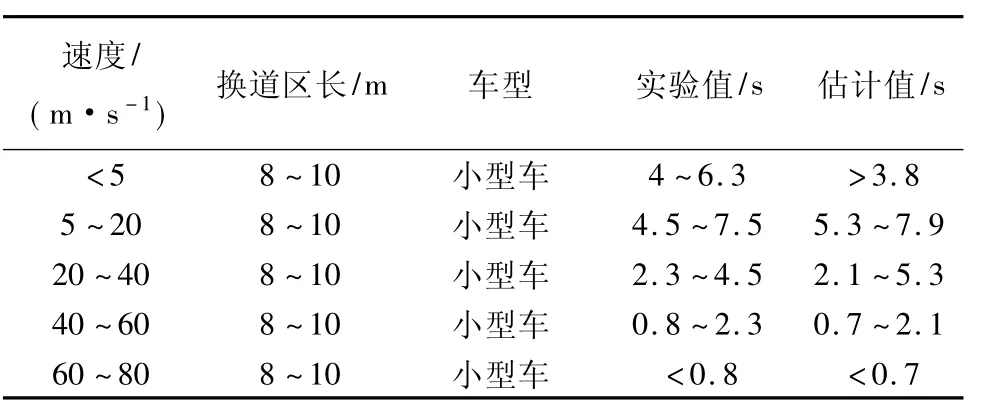
表4 車輛在還道區域的換道時間估計值與實驗值比較Table 4 Compare the actual value with estimation of vehicle lane-changing time
6 結語
車路集成環境下的專用道時分復用的車路協作技術以車路信息為依據,對專用道時分復用的時間片和空間準確劃分,通過車路協作實現專用道路權動態配置的目的。通過搭建專用道時分復用的實驗環境,得到的實驗數據表明,基于車路協作技術的專用道時分復用控制模型符合實際BRT環境要求,可以準確預測車路信息,專用道車輛換道協作技術適用于專用道的時分復用過程。隨著城市BRT專用道里程數不斷增長,車路智能化技術提高,以及城市車路集成環境下專用道換道協作技術的完善,通過時分復用的車路協作技術提高專用道資源利用率具有現實意義。
[1]Hema Tanikella,Brian L Smith,Zhang Guimin,et al.Development and evaluation of a vehicle-infrastructure integration simulation architecture[J].Journal of Computing In Civil Engineering? ASCE,2007,21(6):433-440.
[2]Shelley Row,Mike Chagrin,Valerie Briggs.USDOT.The future of VII[J].ITS International,August,2008.
[3]Mohammad Sharafsaleh ,Joel Vanderwerf,James A Misener,et al.Implementing vehicle-infrastructure integration:real-world challenges[J].Transportation Research Record,2008,2086:124-132.
[4]Caitlin D Cottrill.Approaches to privacy pres- ervation in intelligent transportation systems and vehicle-infrastructure integration initiative[J].Transportation Research Record,2009,2129:9 -15.
[5]董紅召,陳煒烽,郭明飛,等.基于車路一體化支持下的車輛主動避撞系統關鍵技術研究[J].汽車工程,2010,32(11):983-988.
[6]José Viegas,Lu Baichuan.Bus Priority with Intermittent Bus Lanes.Proceedings of Seminar D[C]//European Transportation Conference.UK:Cambridge,1999.
[7]José Viegas,Lu Baichuan.The intermittent bus lane signals setting within an area[J].Transp- ortation Research Part C:Emerging Technologies,2004,12(6):453 -469.
[8]Michael Eichler,Carlos F Daganzo.Bus lanes with intermittent priority:strategy formulae and an evaluation[J].Transportation Research Part B:Methodological,2006,40(9):731 -744.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
