基于遺傳算法的遠程魚雷航路規劃*
2012-07-11 08:47:24吉春生
艦船電子工程 2012年9期
毛 鈺 吉春生
(海軍潛艇學院 青島 266042)
1 引言
所謂遠程魚雷,是指航程在百公里或者百公里以上,具有可控引信,能夠智能制導和遠距離探測的重型魚雷[1]。與一般意義上的魚雷相比,遠程魚雷具有攻擊距離遠,可預先投放等特點,從而可以實現以兵器機動代替發射平臺機動,可對平臺難以或無法接近敵區域進行攻擊,同時也提高了發射平臺的安全性[2]。由于遠程魚雷這些特性,就需要進行從發射點到目標位置區域的全程航路規劃,選擇一條從起點到終點的能夠避開障礙物的最優航行線路,才能最大化的發揮魚雷的作戰效能。
現階段航路規劃有很多種算法[3],如:動態規劃法、神經網絡法、模擬退火法、最優控制法、啟發式搜索法、遺傳算法、蟻群算法等等,各種算法各有其優缺點,算法的優劣主要取決于算法的快速性、算法求出解的最優性。本文運用遺傳算法,綜合考慮航路距離和航路安全性,對遠程魚雷的航路進行規劃,并對算法進行了計算機仿真。
2 遠程魚雷航路規劃
2.1 遠程魚雷航路規劃的基本含義[4]
遠程魚雷航路規劃,是指在綜合考慮作戰任務、敵目標基本性能及運動要素、遠程魚雷基本性能、作戰海區相關情況和航行時間等各種約束因素條件下,找到一條從起始點到目標點的最優或最佳的可行航行軌跡。遠程魚雷航路規劃也稱任務規劃,是指揮員根據作戰目的、戰場情況和敵方艦艇的機動能力,選擇魚雷從發射出管后到預定目標點的最優航路的規劃方法,從而為指揮員實現各種戰術意圖提供良好的技術支撐。隨著魚雷航程的不斷增大,航路規劃在遠程魚雷的作戰運用中起著越來越重要的作用。該規劃包括選定魚雷航向、航速、航路點及末段自導方式,通過合理設置魚雷的航路規劃點,指揮員可以對目標實施多方向攻擊和飽和攻擊,或通過繞過敵方的嚴密防空區提高魚雷的命中能力,實施隱蔽攻擊。目前,潛射遠程魚雷具有航路規劃功能,在魚雷航程及戰場態勢允許的情況下,潛艇指揮員可根據戰術意圖及戰場態勢,靈活設定魚雷的航路點,以充分發揮魚雷的作戰效能。
2.2 遠程魚雷航路規劃的特性
與其他魚雷武器相比,遠程魚雷作為一種新形勢下產生的信息化武器,通過航路規劃具有一定的特性[4~5],主要有:
1)“火力機動”攻擊能力。可以設置多個航路點,以“火力機動”代替“兵力機動”對目標實施多方向、多航路飽和攻擊,攻擊時可以避開島嶼、敵方兵力密集區,增加武器的突防能力。
2)發射平臺及魚雷的隱蔽性提高。遠程魚雷經過各個航路點轉向后可從敵目標意想不到的方向發起攻擊,不僅提高了攻擊的突然性,減少了敵抗擊時間,而且攻擊方向與發射平臺的位置沒有必然的聯系,敵方很難通過攻擊方向判斷出發射平臺的概略位置,有利于兵力的隱蔽行動。發射平臺可以充分利用島岸等有利地形為掩護,或者在我方兵力控制范圍內發射遠程魚雷對目標實施火力機動打擊,有效提高攻擊的隱蔽性和攻擊兵力的生存能力。
3)對信息的需求更高。由于魚雷航程、航時的加大,魚雷的發射出管后,需要相關指揮機構進行精確導引定位,并適時進行信息的傳遞,保障魚雷能安全到達攻擊區域,從而對目標實施攻擊。
3 遺傳算法應用條件及概述
3.1 應用條件
在用該算法做航跡規劃時,本文有以下假設:
1)遠程魚雷通常由發射平臺發射,然后進入一定深度自主航行,因此航路規劃可以建立在二維平面的基礎上。
2)遠程魚雷的環境威脅主要考慮島礁、碼頭等障礙物的威脅。根據各自相應的形狀特點,可以將島礁碼頭等障礙物簡化成規則圖形表示的威脅區域。通過對威脅的簡化處理,得到相應深度的威脅分布平面,在此基礎上進行航路規劃。
3.2 算法概述
遺傳算法(Genetic Algorithm,GA)是模擬自然界生物進化機制的一種算法,即遵循適者生存、優勝劣汰的法則,也就是尋優過程中有用的保留,無用的則去除。在科學和生產實踐中表現為,在所有可能的解決方法中找出最符合該問題所要求的條件的解決方法,即找出一個最優解[6]。本文在算法設計中提出一種基于Voronoi圖的遺傳優化算法
1)首先根據已知的威脅分布情況,構造出威脅及障礙分布的 Voronoi圖[7];
2)根據威脅及障礙邊界點,得出基本航路集合;
3)在Voronoi圖的基礎上,用遺傳算法計算得出最優航路。
4 算法的描述
4.1 Voronoi圖的構造[7~8]
綜合考慮遠程魚雷從發射出管后到目標位置區域整個航行過程中可能航路的地域威脅和障礙發布,構造出威脅及障礙分布的Voronoi圖,如圖1所示。

圖1 威脅及障礙分布Voronoi圖
圖中,S為起點,Z為終點,陰影部分為威脅分布區域,圖中虛線即為Voronoi邊,連接出發點到就位點的這些Voronoi邊的組合,中間構成基本航路集合。Voronoi圖的中間點構成基本路徑的轉彎點,即中途主要的航路點。路徑規劃的任務是找出從出發點到目標點魚雷能回避敵方威脅,安全到達攻擊區域。可以看出,通過構造Voronoi圖,將路徑規劃問題從多維空間的搜索問題簡化到二維空間搜索的問題,即路徑規劃只要在Voronoi圖所確定的路徑集合中進行,避免了直接使用遺傳算法求最優解的盲目性,可以較容易的找出局部最優解,克服了遺傳算法局部尋優能力不足的特點,提高了計算效率。
4.2 使用遺傳算法進行路徑選擇[11~13]
4.2.1 編碼
算法的編碼方式,直接關系到算法的可行性和效率。本文對遠程魚雷的航行區域在Voronoi圖的基礎上采用坐標系表示。定義航路的起點S為坐標的原點,起點和終點的連線為橫軸,其垂線為縱軸。這樣,在Voronoi圖所確定的路徑集就都可以表示成由若干個坐標系上的點組成。假設航路上的航點為S,S0,S1,S2…Si…Z,其中S,Z分別為起點和終點,不參與編碼。Si為第i個航點,i=1,2,3,…N。這樣航線上的某個位置點就可以表示為坐標點。

取各障礙物的邊角為臨界區域點,就可以避免魚雷航行中與障礙物和威脅區域接近發生碰撞。選Mi作為基因值,則M1,M2,M3,…MN為一個染色體。
4.2.2 適應度評價函數
遺傳算法中,計算得到的結果是通過適應度評價函數來進行評價的,因此適應度函數的確定就是將航路規劃時的因素和要求包含進去。適應度評價函數決定了最優解的要求和算法的收斂性,這里采用的適用度評價函數包含的航路安全系數和航程[5]。
安全系數主要考慮魚雷在航行中能否避開障礙物或威脅區域,假設障礙物是圓形區域,半徑為r,航路到障礙物中心點的距離為d,則安全系數可表示為

適應度評價函數可以表示為

式中,L定義為航路總航程;Mi,i+1定義為位置點Mi到Mi+1之間的距離;ki定義為安全系數,介于0~1之間,當ki越趨于0,安全性越低,也就是航路越靠近威脅區域;反之,越趨近于1,安全性越高,但航程越大。
5 計算機仿真
通過算法設計,采用VC語言進行仿真計算,考慮ki的取值,分別選取不同的安全性和航程。算法采用三個基本遺傳算子:選擇,交叉和變異。設定的仿真參數為:群體大小=200,進化代數為200,交叉概率=0.7,變異概率=0.1。仿真結果如圖2及圖3所示:

圖2 重視航程的方案
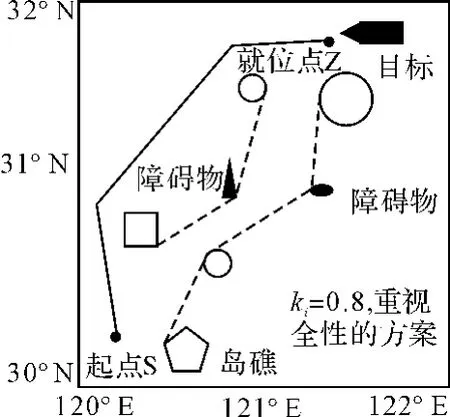
圖3 重視安全性的方案
6 結語
隨著魚雷航程的不斷加大,航路規劃問題將成為提高魚雷作戰效能的一個重要環節。本文提出了基于Voronoi圖的遺傳優化算法,對遠程魚雷這型信息化武器的航路規劃問題進行了初步探討,通過仿真結果證明,這個算法設計是可行的,便于遠程魚雷的優化控制和實時航路規劃,有利于進一步的研究。
[1]李本昌,梁濤.遠程魚雷的作戰樣式及其技術需求[J].魚雷技術,2008,16(4):54-57.
[2]顧險峰,錢建平.魚雷武器遠程精確打擊導引模式和技術架構初步探索[J].艦船科學技術,2003,25(3):7-10.
[3]周彬彬,王學偉.無人機航路規劃問題初步研究[J].中國西部科技,2011,10(4):32-34.
[4]龍飛.航路規劃技術對反艦導彈攻擊影響的探討[J].飛航導彈,2005,12:26-28.
[5]沈建鋒,許誠.遺傳算法在反艦導彈航路規劃中的應用[J].飛行力學,2005,23(3):52-55.
[6]李華昌,謝淑蘭,易忠勝.遺傳算法的原理與應用[J].礦冶,2005,14(1):87-90.
[7]王曉東,廖士中.基于Voronoi圖的定性路徑[J].計算機工程與應用,2009,45(21):193-196.
[8]劉鋼,老松楊.反艦導彈航路規劃圖形化快速逆推方法[J].彈道學報,2011,23(2):52-56.
[9]肖支才,程春華.基于改進遺傳算法的反艦導彈協同任務規劃[J].計算機與數字工程,2010(5).
[10]鞏固,郝國生,楊帆.一種改進的抑制早熟收斂的遺傳算法[J].計算機與數字工程,2009(5).
[11]羅翔,陳戈.基于遺傳算法的自航水雷航路規劃[J].火力與指揮控制,2009,34(3):99-101.
[12]鄭銳,馮振明.基于遺傳算法的無人機航路規劃優化研究[J].計算機仿真,2011,28(6):88-91.
[13]徐劍,周德云.基于改進遺傳算法的多無人機路徑規劃[J].航空計算技術,2009(4).
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
中國工程咨詢(2016年4期)2016-02-14 07:28:28