基于LabviewPXI的EPS硬件在環試驗平臺開發
2012-07-18 06:15:34趙林峰
合肥工業大學學報(自然科學版) 2012年11期
趙林峰, 夏 光,2, 黃 鶴, 高 明
(1.合肥工業大學 機械與汽車工程學院,安徽 合肥 230009;2.合肥工業大學 汽車工程技術研究院,安徽 合肥 230009;3.株洲易力達機電有限公司,湖南 株洲 412002)
基于LabviewPXI的EPS硬件在環試驗平臺開發
趙林峰1, 夏 光1,2, 黃 鶴1, 高 明3
(1.合肥工業大學 機械與汽車工程學院,安徽 合肥 230009;2.合肥工業大學 汽車工程技術研究院,安徽 合肥 230009;3.株洲易力達機電有限公司,湖南 株洲 412002)
文章以非線性輪胎模型和7自由度整車動力學模型為基礎,在Labview平臺建立轉向阻力矩動力學模型,轉角信號作為輸入,使用LabVIEW RT(實時)模塊,將這些模型程序下載到實時目標硬件PXI上運行,結合硬件接口電路控制電液比例控制器,繼而驅動液壓加載裝置來模擬轉向阻力矩。試驗結果表明,設計的硬件在環試驗臺可用于EPS基本特性的測試、試驗和EPS控制器的開發、參數調整。
電動助力轉向;試驗臺;轉向阻力矩;硬件在環
0 引 言
為了實現電動助力轉向系統(EPS)的2個主要功能,即轉向操縱輕便性或不同的駕駛路感、良好的回正性能,開發過程中須進行大量的實車試驗,需要很長的開發周期,且消耗大量的人力和物力。因此,能夠有效縮短開發周期、節約開發成本的EPS系統開發和相關部件測試的方法和試驗平臺,一直是國內外高校和科研機構的研究熱點[1-2]。
文獻[3-4]采用線性類彈簧結構模擬轉向阻力矩;文獻[5]通過加載裝置中的千斤頂調節前輪負荷,以獲得不同的轉向阻力矩;文獻[6]根據不同的試驗,可以選擇人工手動加載或伺服電機加載模擬轉向阻力矩;文獻[7]設計開發了一套基于雙伺服電機加載的電動助力轉向器硬件在環仿真試驗平臺。
文獻[3]采用線性類彈簧結構、文獻[8]采用基于ARM7控制的液壓加載裝置模擬轉向阻力矩,但不能隨車速以及路面狀況調整轉向阻力矩。
本文設計了基于Labview PXI的EPS試驗臺,以轉向盤轉角信號作為輸入,結合硬件接口電路控制電液比例控制器,繼而驅動液壓加載裝置輸出壓力模擬轉向阻力矩。試驗表明,所設計的試驗臺可以模擬出不同路面條件及車速下的轉向阻力矩,便于進行EPS控制器設計和調試。
1 轉向試驗臺模型
基于Labview PXI的轉向實驗臺,主要由宿主機、目標機和控制對象等組成。宿主機是普通計算機,在其上安裝有Labview軟件及相應的實時模塊、各種外部設備的驅動程序,運行車輛動力學模型,隨著轉向盤轉角和路面條件的變化輸出轉向阻力矩。目標機是一臺美國NI公司的PXI-1042Q控制器,該控制器提供了一個實時操作系統,用以實現控制程序的執行。接口系統起到了承上啟下的作用,一方面將通過轉向試驗臺傳感器獲得的信號輸入到控制器,另一方面將控制器輸出的控制信號發送到試驗臺。在試驗過程中,上位機與下位機間通過TCP/IP協議構成了網絡架構下的連接。上位機編好的應用程序,下載到下位機的實時操作系統中進行編譯、運行,下位機部分結果在上位機進行顯示。EPS硬件在環試驗臺架構的原理如圖1所示。

圖1 EPS硬件在環試驗臺架的架構
由于汽車行駛的工況、路況十分復雜,轉向過程中轉向系統要克服回正力矩和摩擦阻力矩以實現轉向,回正過程中回正力矩是轉向車輪自動返回到直線行駛位置的主要恢復力矩。在不同附著系數路面上,同樣的操作過程中,轉向阻力矩或回正力矩卻又有很大差異。為了將轉向阻力矩與車輛運行環境聯系在一起,須建立轉向系統轉向阻力矩模型,簡化的作用在轉向小齒輪的轉向力矩Tr模型如下:

其中,N2為轉向軸到前輪的傳動比;Mz為前輪自回正力矩;Msz為重力引起的回正力矩;Tf-rp為轉向系摩擦力矩。
輪胎的自回正力矩Mz由輪胎側向力和輪胎拖距產生,這里需引入整車動力學模型計算輪胎的自回正力矩。
不考慮車輛側傾因素的影響,仿真采用7自由度車輛模型簡圖及動力學方程、輪胎與路面之間的接觸力在車身航向直角坐標上的分解圖[9]。采用的非線性輪胎模型為Dugoff輪胎模型,設左右輪胎側偏剛度相同,4個輪胎縱向剛度相同,不考慮其滯后特性,其表達式為:
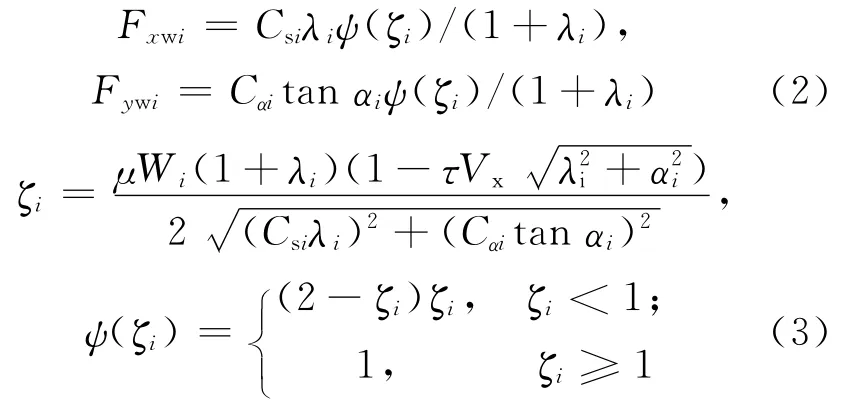
其中,λ為輪胎的縱向滑移率;Fxw、Fyw分別為輪胎縱向力、側向力;τ為車速附著系數影響系數;Cαi、Cs分別為輪胎的側偏剛度、縱向剛度;μ為路面附著系數;ζ為輪胎動態參數;ψ(ζ)為有關ζ的函數;i=1,2,3,4,分別表示左前輪、右前輪、左后輪、右后輪。
假設同軸左、右車輪的轉向角相同,前輪轉向,即
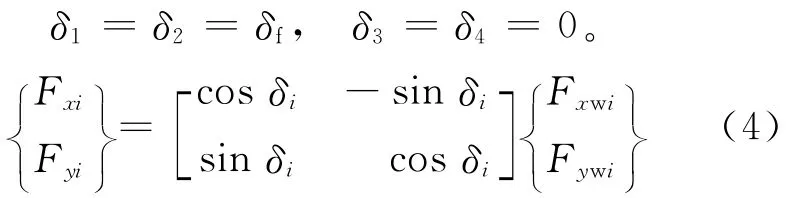
其中,δ為輪胎轉角;Fxw、Fyw分別為輪胎縱向力、側向力;i=1,2,3,4。
輪胎拖距為主銷后傾引起機械拖距及氣胎拖距之和。機械拖距tm視為一定值,而氣胎拖距tp不同,它受輪胎側偏剛度、路面附著系數及側偏角等因素影響,其初值為tp0,表達式如下:
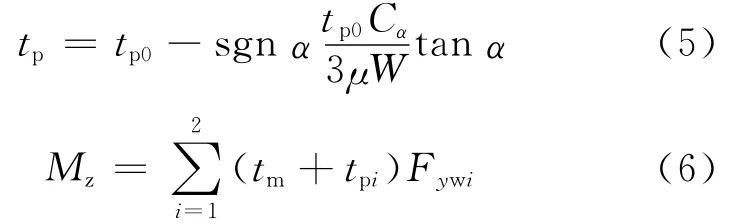
其中,α為輪胎側偏角。
在上述模型中,描述的是輪胎側向力Fy和輪胎自回正力矩Mz隨側偏角變化的特性,隨著輪胎側偏角的增大,輪胎自回正力矩比側向力更早地達到飽和狀態,且達到峰值后,輪胎自回正力矩會急劇降低。
一般稱自回正力矩到達峰值之前的區域為線性區域,而隨著路面附著系數的降低,輪胎自回正力矩線性區域和幅值會明顯降低。
重力引起的回正力矩Msz可描述[9]為:

其中,Dn、φ為主銷內傾量、主銷內傾角。
原地轉向時松開轉向盤后,轉向盤會小幅度回正,但并不能置中,這是由于轉向系統的內部摩擦力矩Tf-rp所致,一般可認為Tf-rp為常數。
2 試驗平臺搭建
采用線性類彈簧結構模擬轉向阻力矩,在常規助力過程中,該模型的簡化對實際結構的影響不大,而在回正控制行程中影響卻很大[10]。
由文獻[5-8]可知,以往搭建的實驗臺都不能很好地隨車速和路面附著系數變化而調整轉向阻力矩,割裂了其與車輛運行環境的聯系,完整地進行試驗臺驗證EPS控制策略有所欠缺,有很大的局限性。
隨著計算機技術的發展,LabVIEW作為一個圖形化編程軟件,是開發試驗系統的一種功能強大、方便快捷的編程工具,該軟件結合自身的硬件系統,其靈活、圖形化的編程方式,豐富的硬件接口,能夠很好地滿足試驗技術要求,在汽車領域取得了很好的應用效果。NI LabVIEW圖形化開發環境和PXI模塊化硬件平臺是硬件在環(HIL)系統應用的理想之選。
試驗臺由電控液壓比例閥、液壓加載裝置、轉向機構及固定底座組成。轉向實驗臺的架構及實驗臺布置如圖2所示。
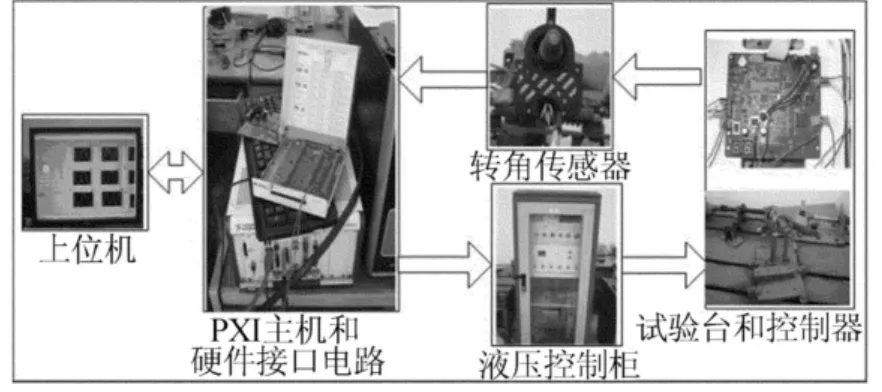
圖2 實驗臺布置
2.1 仿真程序和界面開發
在Labview環境下建立相應的轉向阻力矩模型,程序和界面如圖3所示。圖3a為硬件在環仿真程序,是基于Labview軟件平臺的電動助力轉向系統模型和輸入輸出控制的接口模塊;圖3b為主界面,左邊是輸入參數窗口,右邊顯示的是在路面附著系數為0.3時的仿真結果,左下方的是轉角傳感器輸入或正弦模擬輸入切換按鈕,可以外接轉角傳感器信號或以軟件模擬方式進行仿真。
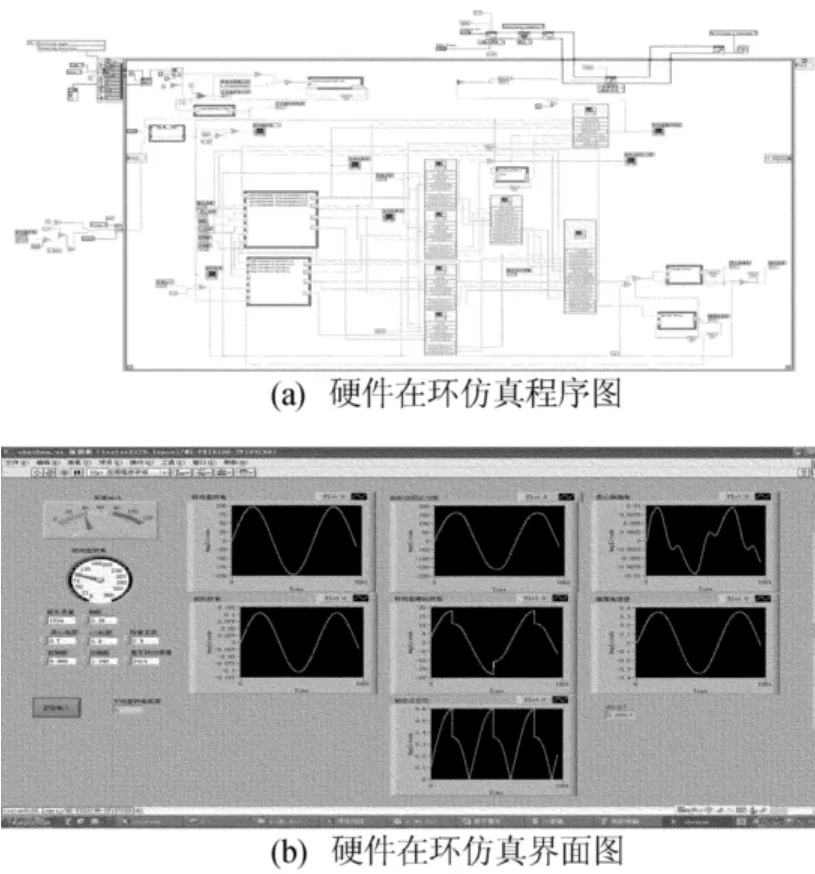
圖3 硬件在環仿真程序和界面
2.2 接口系統程序開發
采用NI公司的PXI-1042Q控制器,該控制器有豐富的接口系統(數據采集卡),能夠滿足一般的系統信號測試。配合Labview RT程序,較好地保證了系統的實時性。接口系統是用來實現軟件系統和實際硬件系統連接功能的部分,接口系統控制程序包括轉矩傳感器、助力電動機電流、轉角傳感器等信號采集程序以及電液比例控制器控制信號輸出程序。
對于信號采集程序,需要進行信號類型(數字或模擬)、采集端口、采樣模式、采樣頻率等的設置。本硬件在環試驗平臺中,CAN信號屬于數字信號類型,其他的如電壓采集屬于模擬信號范疇。在Labview中,有相關的虛擬儀器(VI)供用戶編程使用。
Bosch公司的轉角傳感器的輸出信號為CAN信號,將該信號通過PXI-8464板卡的CAN通訊口傳送至硬件在環系統,首先要對其連接線進行改造,然后在Labview平臺下進行配置。圖4所示為轉角傳感器接線及配置圖。
另外,選擇了PXI-6289板卡的ai0、ai1及ai2模擬端口,采用連續采樣模式進行主副轉矩信號、電流信號的采集,選用3階Butterworth低通濾波器(截止頻率20kHz)對采樣信號進行濾波。
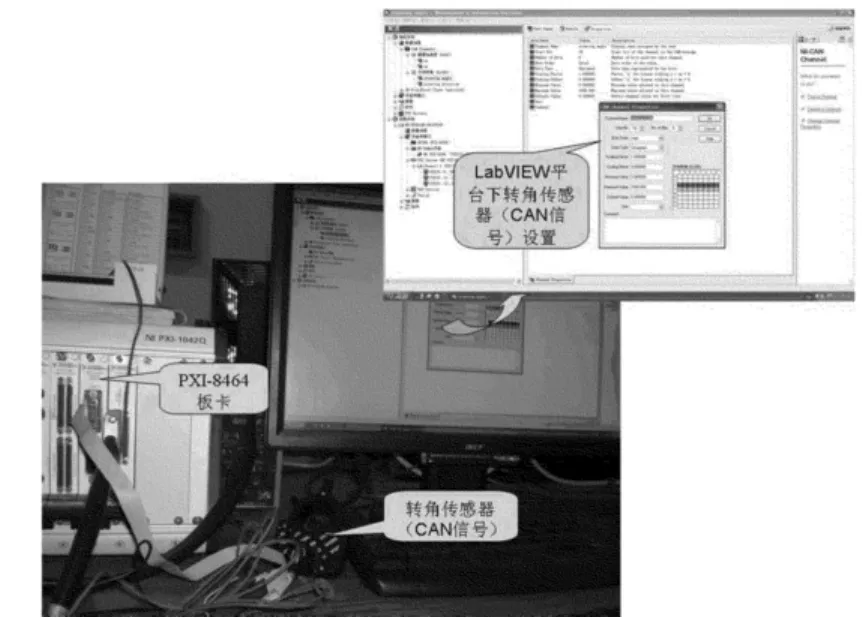
圖4 轉角傳感器接線及配置
信號輸出程序與信號采集程序類似,需要進行信號類型(數字或模擬)、發送端口、發送模式、發送頻率等設置,如圖5所示。

圖5 信號采集和輸出程序
VT-2000BS40G型電液比例控制器由北京金維碩公司推出,用于VA/E變量葉片泵、A7V、A2V軸向柱塞泵、A6V軸向柱塞電機及DBE系列先導式比例溢流閥、DBE系列先導式比例壓力閥的控制。
該電液比例控制器有手動方式和自動控制方式。本方案采用自動控制方式,選擇了PXI-6289板卡的ctr0端口,實現對VT-2000BS40G型電液比例控制器的控制。
3 試 驗
設計基于路面附著系數的EPS控制策略,試驗條件設定為縱向車速40km/h,路面附著系數分別為0.55和0.30,以轉向盤轉角作為輸入,在上述試驗臺上進行硬件在環試驗,輸出的試驗結果以文檔格式進行保存,繪出轉向盤操縱轉角-轉矩、轉向盤轉角-時間曲線,描述車輛的轉向操縱輕便性及回正特性。
車輛轉向操縱輕便性硬件在環試驗結果如圖6所示。
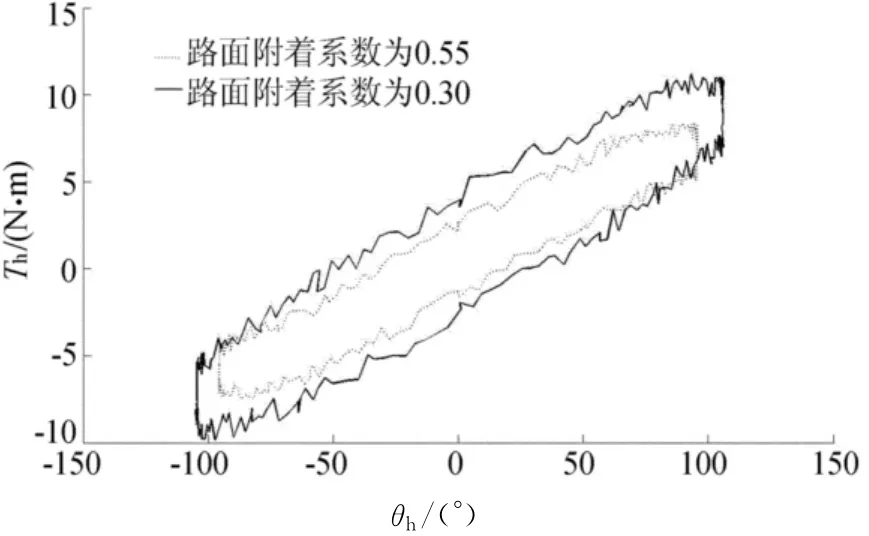
圖6 轉向操縱輕便性硬件在環試驗結果
從圖6可以看出,隨著路面附著系數的降低,同樣條件下轉向盤操縱轉矩降低;隨著路面附著系數的降低,轉向操縱轉矩飽和時對應的操縱轉角減小,這樣的路感可以警示駕駛員不能再增大轉向盤轉角,否則導致側滑趨勢,產生危險。
車輛回正特性硬件在環試驗結果如圖7所示。
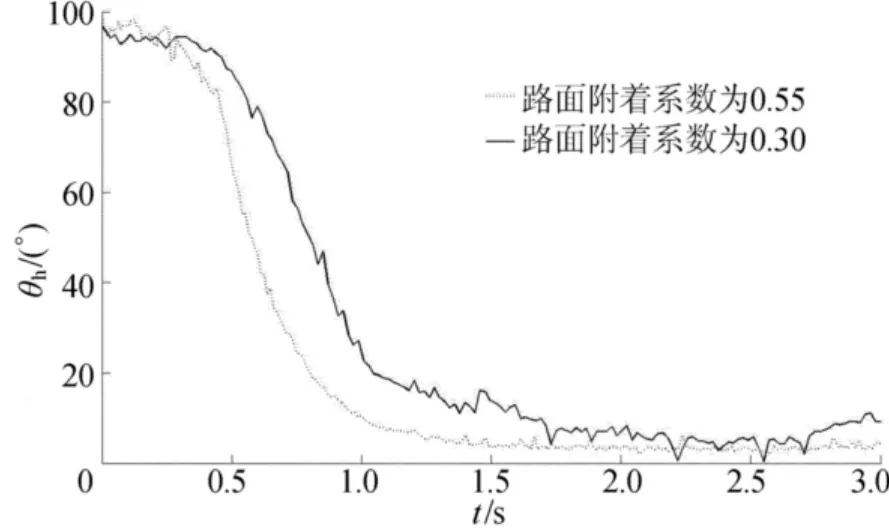
圖7 回正特性硬件在環試驗結果
從圖7可以看出,在初始轉向盤位置大致相同的條件下,雖然設計的回正控制策略使電動機提供較大的回正轉矩,以提高車輛回正性能,但輪胎自回正力矩隨路面附著系數的降低而減小,致使低附著路面條件下,殘留轉向盤轉角大,且回正所需時間較長。
綜上所述,該硬件在環試驗平臺所得出的低附著路面上車輛的轉向操縱輕便性及回正特性,與文獻[11]的試驗結果相吻合,可基于該平臺進行EPS控制策略的開發驗證。
4 結束語
為解決當前條件下缺乏驗證低附著路面上EPS控制策略的實車試驗條件的難題,本文以非線性輪胎模型和7自由度整車動力學模型為基礎,開發了基于LabVIEW的轉向試驗臺,輸入端采用方向盤手動加載,根據當前方向盤轉角信號及實車運行參數,對整車動力學模型和輪胎模型進行求解,液壓加載機構輸出相應的轉向阻力矩,可以對低附著路面的EPS控制策略進行硬件在環試驗。從試驗結果可以看出,該試驗平臺可以方便地用于EPS系統的研發,驗證轉向系統的轉向操縱輕便性及回正性能。
[1]Yeh C J,Ho S R,Lin M C,et al.Development of a test bench for tuning and validating electric power steering control method[C]//Vehicle Power and Propulsion Conference,2007,VPPC 2007,IEEE,2007:618-622.
[2]王其東,秦煒華,姜武華.基于多體模型和硬件在環試驗的汽車EPS控制研究[J].合肥工業大學學報:自然科學版,2010,33(8):1131-1135.
[3]王其東,楊孝劍,陳無畏,等.電動助力轉向系統的建模及控制[J].農業機械學報,2004,35(5):1-4.
[4]徐建平,何 仁,苗立東,等.電動助力轉向系統回正控制算法研究[J].汽車工程,2004,26(5):557-559.
[5]施國標,林 逸,陳萬忠,等.汽車電動助力轉向試驗臺測試系統開發[J].測控技術,2005,24(3):157-162.
[6]鄧文才,王 耘,姚棟偉,等.電動助力轉向器性能試驗系統設計與實現[J].工業控制計算機,2005,24(3):210-215.
[7]姚棟偉,吳 鋒,楊志家,等.基于雙伺服電機的電動助力轉向器硬件在環仿真試驗平臺[J].浙江大學學報:工學版,2009,43(10):1331-1334.
[8]夏 光,秦煒華,唐希雯.汽車EPS試驗臺液壓控制系統設計[J].汽車電器,2008(2):34-40.
[9]趙林峰,陳無畏,劉 罡.電動助力轉向系統全工況模型建模及試驗驗證[J].農業機械學報,2009,40(10):1-4.
[10]高 勇,陳 龍,袁傳義,等.電動助力轉向系統回正控制研究[J].農業機械學報,2007,38(5):6-10.
[11]Kurishige M,Tanaka H,Inoue N,et al.An EPS control strategy to improve steering maneuverability on slippery roads[C]//SAE Paper,2002:2002-01-0618.
Development of hardware-in-loop test platform for EPS based on LabviewPXI
ZHAO Lin-feng1, XIA Guang1,2, HUANG He1, GAO Ming3
(1.School of Machinery and Automobile Engineering,Hefei University of Technology,Hefei 230009,China;2.Institute of Automobile Engineering Technology,Hefei University of Technology,Hefei 230009,China;3.Zhuzhou Elite Electromechanical Co.,Ltd.,Zhuzhou 412002,China)
Based on the nonlinear tire model and seven-degree freedom vehicle dynamic model,the steering resistance torque dynamics model is established based on the Labview platform.The steering angle signal is used as the input,the Labview RT module is used to download the modular program to the real-time target hardware PXI and control the electrohydraulic proportional controller with the hardware interface circuit,and then the hydraulic loading devices are driven to simulate the steering resistance torque.The results show that the designed hard-in-the-loop(HIL)platform can be applied in the test of the characteristics of EPS,and the development and parameters control of EPS controller.
electric power steering(EPS);test platform;steering resistance torque;hard-in-the-loop(HIL)
U463.44
A
1003-5060(2012)11-1447-05
10.3969/j.issn.1003-5060.2012.11.003
2012-03-26;
2012-05-29
合肥工業大學博士專項科研基金資助項目(2010HGBZ0614);中央高校基本科研業務費專項資金資助項目(2011HGQC1010);中航工業創新基金資助項目(CXY2010HFGD26;CXY2010HFGD27)
趙林峰(1979-),男,安徽宣城人,博士,合肥工業大學講師.
(責任編輯 呂 杰)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03