基于地磁技術的車輛檢測傳感器
2012-07-18 07:40:48楊志愷楊成忠李佳駿
杭州電子科技大學學報(自然科學版) 2012年5期
楊志愷,楊成忠,張 君,李佳駿
(杭州電子科技大學自動化學院,浙江杭州310018)
式中,L為兩傳感器間的距離。N為兩閥值間的時間序列點數。f采樣頻率表示傳感器的采樣頻率。
0 引言
智能交通系統最基礎并且最重要的環節就是車輛檢測傳感器[1]。國內外,車輛檢測傳感器的種類大致相同,多數采用環形線圈作為檢測原件。此類傳感器受工作方式影響,線圈容易損壞,且安裝成本較高[2]。地磁檢測技術早在70年代初期就開始應用于車輛檢測。但由于當時磁場傳感器的檢測精度不高,此方法始終沒有得到長足發展[3]。如今,隨著高精度磁場傳感器的誕生,地磁檢測技術將足以完成車輛檢測的工作。本文選用TMR磁場傳感器,設計了一種安裝簡便,精度較高的車輛檢測傳感器。
1 地磁車輛檢測原理
地球表面存在著大小約為0.6Gs,且在一定范圍內相當穩定的磁場[4]。汽車作為一種大型的鐵磁物體,可以看作一個雙極性磁鐵的模型。車輛周圍的磁感應強度因為車輛自身磁場與地磁場相互作用而產生有規律變化。簡單來說,車輛周圍的混合磁場可以建立成一個磁偶極子的模型[5]。如圖1所示,將車輛看作兩個相距L遠的點電荷-qm、+qm。其中,L=2d。磁場傳感器位于坐標軸原點。為了簡化分析,假設車輛在運動時,點電荷模型的相對位置保持不變。此時,磁偶極子在原點處的磁場強度:

將式2、3代入式1中得:

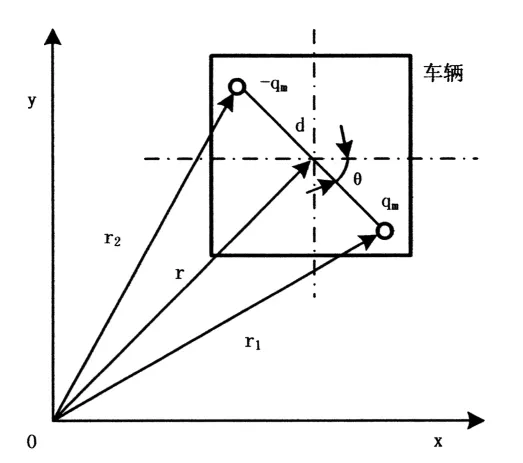
圖1 車輛周圍磁場的磁偶極子模型
由式4、5可知,磁偶極子在原點處的磁場強度會隨著其所在位置不同而有規律變化。且不同的磁偶極子,因為qm的大小不同,在原點處的磁場大小也會不同。根據此原理,可通過檢測車輛行駛時的磁感應強度來獲取交通流信息。
2 車輛檢測傳感器硬件設計
如圖2所示:當車輛進入檢測范圍內,3軸TMR磁阻傳感器會將3個分量的地磁場信號轉化成電壓輸出,電壓經運放放大后輸入AD轉換器。最終,地磁場信號以數字量的形式輸入單片機。單片機首先對數據進行校正,濾波等預處理。最后,根據預設算法,對輸入的AD碼進行分析,獲得一系列道路車輛信息。二總線接口電路負責信號以及電力的傳輸。
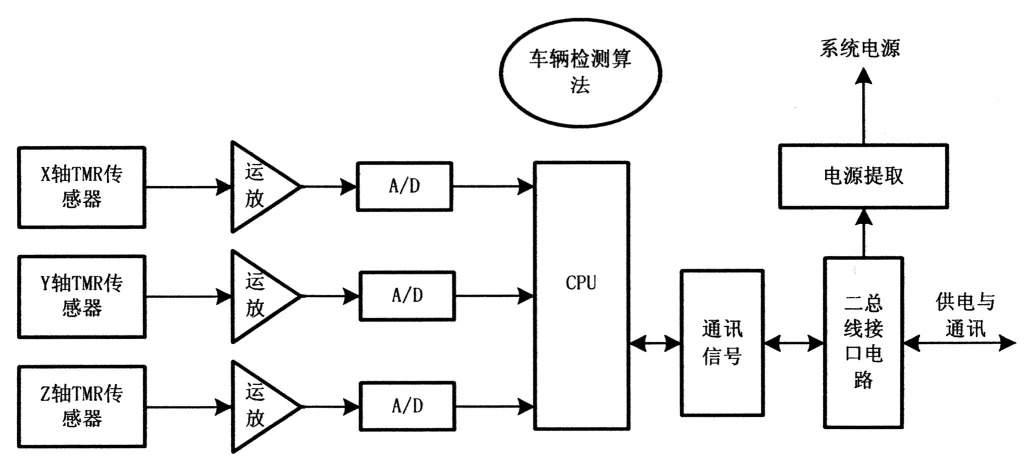
圖2 傳感器結構框圖
3 基于磁感應強度車輛檢測算法的實現
由于地磁信號微弱且易受干擾,故采用滑動濾波對數據進行平滑處理:

式中,xn表示原始信號的抽樣序列,f(n)是處理后的信號序列。M是窗口長度,取值隨外界條件而定。
為了去除每臺傳感器間因靈敏度不同造成的系統誤差,必須對3軸數據進行歸一化處理:

式中,xn表示原始數據,S(n)表示歸一化后的數據。
車輛有無判斷:由第二節檢測原理可知,車輛經過傳感器時會在正反向產生一個絕對值相同的極值。因此,可通過設定閥值α確定車輛是否通過:

式中,s(n)為經過處理后的時間序列。α為閥值。y(n)=1時表示有車,為0時表示無車。
行駛方向判斷:假設1號,2號傳感器平行于道路方向,由南向北擺放。若1號先于2號到達閥值,則說明車輛是由南向北行駛。反之,車輛由北向南行駛。
車輛速度計算:將兩傳感器豎直擺放,使敏感軸方向相同。車輛先后通過兩臺傳感器。由于采樣頻率是確定的,只需確定兩傳感器到達閥值之間的時間序列的點數便可確定車速:

式中,L為兩傳感器間的距離。N為兩閥值間的時間序列點數。f采樣頻率表示傳感器的采樣頻率。
4 實驗結果分析
將兩臺傳感器保持相同敏感軸方向,平行于道路,由南向北擺放。1號在前,2號在后,兩者相距50cm。X敏感軸由南向北,平行于車輛行駛方向。Y敏感軸由東向西,垂直于車輛行駛方向。Z敏感軸垂直于水平地面,指向空中。假設車輛以最高速120km/h通過傳感器,車身長度為5m,為保證擾動曲線能被完整記錄,必須確保在0.15s的通過時間內,地磁信號被采樣10次。因此確定采樣頻率為100Hz。
駕駛車輛以20km/h的速度由南向北從兩臺傳感器的正上方駛過。采樣數據存儲于計算機,經整理后導入Matlab軟件進行仿真。根據式6、7并選取M=10,對數據進行處理后得到1號傳感器和2號傳感器的磁感應強度波形如圖3,4所示:
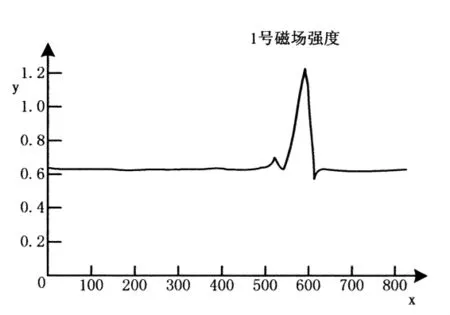
圖3 1號傳感器磁場強度曲線
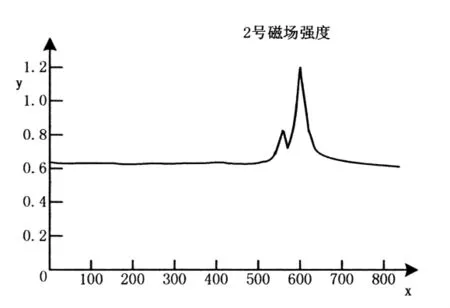
圖4 2號傳感器磁場強度曲線
試驗中,暫取閥值α=1.1。根據式8,當s(n)≥α時,y(n)=1。此時,輸出有車信號。

由于1號傳感器先于2號到達閥值,因此可判斷車輛行駛方向為由南向北。
5 結束語
本文所設計的基于地磁技術的車輛檢測傳感器可以準確記錄下車輛行駛過程中對地磁的擾動,并根據相應算法獲得車輛的存在,速度,行駛方向等一系列交通道路信息。經實驗證明,本設計具有一定的檢測精度。但在實際應用中,因車輛檢測閥值α的確定是影響車檢精度的關鍵,而此閥值需根據不同環境進行相應調整,故后續有待建立一套更為完整的算法來對α進行定量的研究,使其做到自適應調整。
[1] Lee Tsu-Tian.Research on Intelligent Transportation Systems in Taiwan[C].Kunming:Proceedings Of the 27th Chinese Control Conference,2008:18 -19.
[2] 史元超.基于信息傳感器的交通狀態獲取技術的研究[D].北京:北京交通大學,2009:3-6.
[3] MiltonMills.Magnetic Gradient Vehicle Detector[C].Cleveland:Proceedings Of the 24thIEEE Vehicular Technology Conference,1974:91 -95.
[4] 徐文耀.地磁學[M].北京:地震出版社,2003:15-21.
[5] Kwan B W,Tung L J.Magnetoresistors For Vehicle Detection And Identification[C].Florida:Department of Electrical Engineering.FAMU -FSU College of Engineering,1997:3 839-3 840.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
海峽科技與產業(2016年3期)2016-05-17 04:32:12
