海洋儀器設備垂直循環造流試驗水槽系統設計
2012-07-19 08:19:30王項南宋雨澤
海洋技術學報 2012年4期
關鍵詞:設計
路 寬,王項南,熊 焰,李 彥,宋雨澤
(國家海洋技術中心 ,天津 300112)
海洋儀器設備垂直循環造流試驗水槽系統設計
路 寬,王項南,熊 焰,李 彥,宋雨澤
(國家海洋技術中心 ,天津 300112)
海洋動力環境模型試驗是海洋監測儀器設備和海洋能發電裝置研制的重要過程和手段,是海洋環境監測技術和海洋能開發技術研究的基礎。垂直循環造流水槽系統憑借其建設占地面積小及具有較長穩定段等優勢,成為海洋儀器設備模型試驗的主要實驗平臺之一。文中提出了垂直循環造流水槽系統的整體設計流程與計算方法,并進行了數值分析,為海洋儀器設備動力實驗平臺的建設提供了技術依據。
海洋儀器設備;垂直循環造流水槽;系統設計;數值模擬
我國海洋資源豐富,開發和利用潛力巨大,在海洋開發的過程中,海洋環境監測、海洋能開發利用等高新技術的研究和發展是促進海洋可持續開發利用的關鍵環節。在海洋監測儀器設備和海洋能發電設備的研制過程中,實驗室模型試驗是重要的研究手段之一,通過試驗可再現海洋動力環境,驗證海洋監測儀器設備和海洋能發電設備的技術指標和環境適應性,為技術的發展提供科學依據,促進海洋高新科技研發成果的產業化進程。
目前,循環試驗水槽主要體現為兩種工作方式,一種為水泵驅動,另一種為電機—葉輪驅動的水平循環水槽。在高流速、大流量工況下,水泵驅動方式不僅消耗電機功率巨大而且易產生汽蝕,增加了試驗成本;電機—葉輪驅動的水平循環造流方式,試驗設施建設占地面積大,因此多為小型設施,規模小意味著穩流端短,試驗區不容易形成穩定的流場,影響試驗數據的真實。垂直循環造流水槽可以在高流速、大流量工況下實現低功耗,同時減少試驗設施建設占地面積,是一種非常具有發展前景的試驗系統。
1 垂直循環造流水槽設計
垂直循環造流水槽可根據以下流程圖(圖1)進行設計。
1.1 水槽工作段基本參數
設計垂直循環造流水槽,首先是確定工作段的設計流速。流速可根據實驗對象的需求先確定縮尺比,再根據我國海洋實際情況,確定設計流速。設計流速確定后,就需要確定試驗區的尺寸,為了使實驗區有一個均勻穩定的流場,實驗區的長度不宜過短,其長度一般為模型長度的3倍,常用AUV模型的長度一般在2~3 m,因此實驗段的長度取6~9 m即可。海洋儀器模型實驗應在無邊界層影響的水流中進行,模型寬度不得超過水槽寬度的1/5,以AUV模型為例,其直徑在0.3 m左右,因此實驗段的寬度應該在1.5 m以上為宜。實驗段的高度也有一定的要求,設實驗模型的高為d,實驗區的高應在4 d以上為宜。
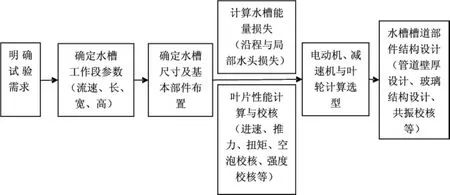
圖1 水槽的設計流程圖
1.2 水槽尺寸及基本部件布置
1.2.1 水槽長度的確定
水槽工作段確定以后,就可以根據水槽的功能確定整體尺寸。對于只具有造流功能的水槽,不要求很長,因為流體在經過整流段之后,流體的湍流度就基本滿足要求了。但是目前的水槽多為波流混合水槽,根據《波浪模型試驗規程》規定,造波板距模型的距離應該保持在7倍波長以上。
1.2.2 整流與導流裝置的布置
水槽一般裝有整流格和阻尼網,它的功能是將來流進行調整,大渦旋通過整流格切割成小渦旋,又將橫向流動的水流導直。阻尼網作用是為了降低流體的湍流度。資料表明,西方一些國家的水槽整流段與工作段的長度比為1∶1,有的甚至超過了工作段長度,整流的效果很好,如英國的NPL水槽的整流段就大于工作段,流體的流場均勻穩定,湍流度只有0.5%,而日本的一些水槽由于整流段比較短,流場的湍流度相對高一些,達到了2%左右。因此整流段應盡量長一些。在水槽的轉角處應設置導流片,且導流片的布置應該科學,避免水流的分離。
1.2.3 消波裝置的布置
水流的運動,會使自由表面產生波浪,特別是流速超過1 m/s時,水面就會產生明顯的波動,對實驗造成很大的影響。為了避免這種表面興波,要滿足弗汝德數小于0.55,同時,需采用被動消波的方法,即在水槽的末端安裝消波板,消波板的角度最好可以調節,且板上需要布置格柵,以最大程度地消除波浪的影響。對于具有造波功能的水槽,可同時采用主動消波的方法,來消除二次反射波的影響。
1.3 水槽能量損失計算
由于流體粘性的影響,流體在流動時會產生阻力,克服阻力就要消耗一部分機械能,造成能量損失。單位重量液體的能量損失稱為水頭損失。水頭損失的正確計算,在工程上是一個極為重要的問題,直接影響到動力設備容量的確定。流體流動時,由于外部條件不同,其水頭損失通常分為沿程水頭損失與局部水頭損失,即:

(1)沿程水頭損失
液體流動時,由于克服摩擦阻力做功消耗能量,成為沿程阻力。單位重量液體克服沿程阻力而損失的水頭成為沿程水頭損失。沿程水頭損失是隨著流程的長度而增加,在較長的管道中是以沿程水頭損失為主的流動。根據水力學,可知均勻流沿程水頭損失的計算公式如下:

式中:λ為沿程水頭損失系數,根據流態不同λ值也不同,其計算方法可參考水力計算手冊;l為流程長度;R為水
力半徑;V為斷面平均流速。
(2)局部水頭損失

式中:ζ為局部水頭損失,它與形體周界變化和水流的流態有關,常見的管路局部損失系數值可參考相關資料。
1.4 驅動電機與減速機的選型
根據水槽的總水頭損失,采用下式計算工作段功率:

式中:P為功率;Q為工作段流量;H為總水頭(mm);γ為水比重。
減速機的選型應滿足葉片扭矩的要求,首先計算水槽螺旋槳的推力與扭矩,再選擇滿足扭矩與縮比要求的減速機。
1.5 葉片性能計算與校驗
驅動水流的軸流泵是水槽造流技術的關鍵,因軸流泵工作條件是揚程小,流量大,比轉數高達3 000以上,而軸流泵的定型產品中比轉數只有1 000左右,如果在循環水槽中使用這樣的軸流泵,會產生汽蝕,嚴重影響工作效率。因此,為了滿足比轉速的要求,一般采用導管螺旋槳做軸流泵葉片。
(1)流體流速
根據流體力學的連續方程:

式中:Q為流體流量;ρ為流體密度;V為流體流速(1,2表示不同截面處的流體)。對于不可壓縮和均勻介質流體,各截面上流體密度相等,因此得不可壓縮均勻介質流體連續性方程為:

(2)螺旋槳推力與扭矩的估算公式
螺旋槳推力:

式中:η為軸系效率,取 0.846;Ne為電機功率(kW);V2為螺旋槳進速。
螺旋槳扭矩:

(3)螺旋槳空泡校核
用導管螺旋槳空泡實驗所得公式,應滿足:

式中:AD/A0為展開面積比;D為螺旋槳直徑;PD為螺旋槳收到的功率;n為螺旋槳轉速;P0為螺旋槳沉沒處壓強;PV為氣化壓強,取1.705 kPa;R為螺旋槳半徑;γ為淡水重度,取 9.8×103N/m3。
(4)螺旋槳強度校核
根據規范規定,普通螺旋槳厚度不得小于:

式中:K為材料系數;Y,C按下式計算:
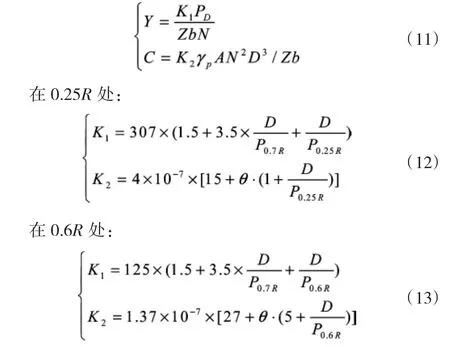
式中:t為 0.25R、0.6R 處槳葉厚度(cm);Z 為葉數;b為弦長;N 為轉速(r/m);γP為材料重度(g/cm3);A 為盤面比;θ為縱斜角(°);P為螺距(m)。
水槽結構計算主要包括水槽部件壁厚計算、加強筋的設置、玻璃結構計算以及水槽固有頻率計算,這些可參考相關規范進行設計,這里就不再介紹。
2 實例計算
以海洋監測設備動力環境試驗水槽為例進行計算,該水槽為風、浪、流共存的多功能實驗水槽。海洋能室內試驗設備的縮尺比一般為1∶10,根據重力相似理論,試驗水槽的流速比尺為1:,再根據對我國海域實際流速調查的結果分析,確定將4 m/s作為實際海洋環境指標,根據縮尺比,因此設計流速取1.5 m/s。類似的,根據前一節的設計流程對水槽的其它具體參數進行了設計,如表1。
水槽基本結構如圖2。
2.1 水槽能量損失計算
根據式(2)和式(3)計算得到水槽能量損失結果如表2。
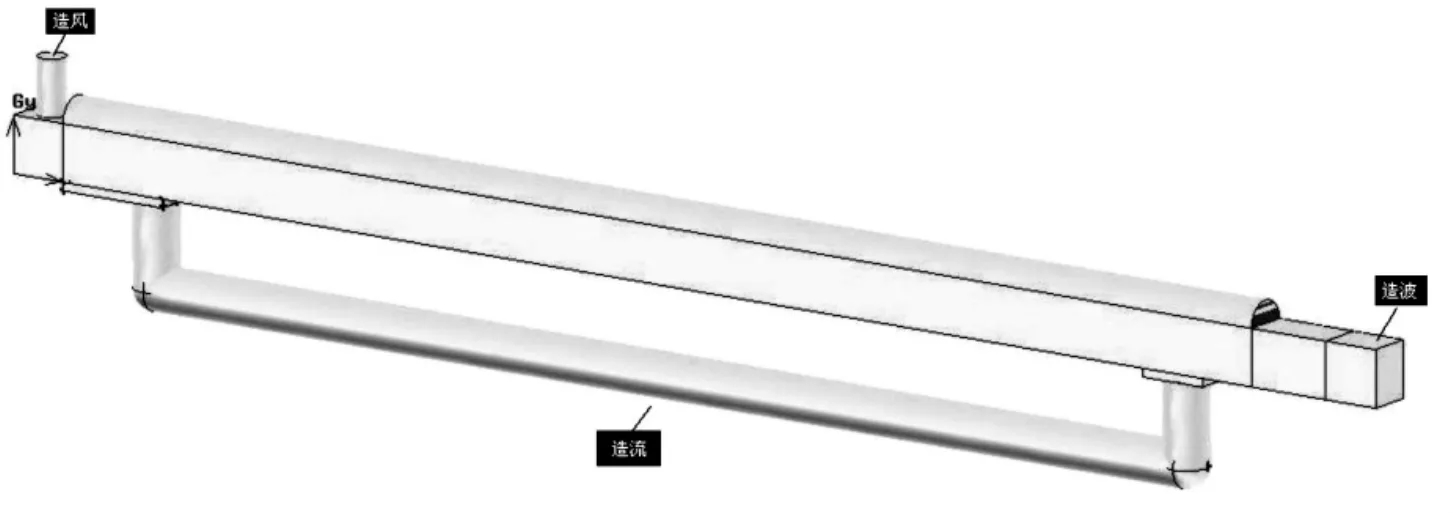
圖2 水槽基本結構

表1 水槽的具體參數

表2 水槽能量損失
2.2 驅動電機的選型
經計算,本水槽工作段的最大流量為2.88 m3/s,根據流速為1.5m/s時候的總水頭損失0.351 593 m,壓力損失為2.815m。考慮到驅動系統的水頭必須大于總水頭損失,為安全考慮,取水頭損失的1.5~2.0倍,可以得到電機功率約為135 kW。
2.3 葉片性能計算與校驗
(1)螺旋槳進速
水槽工作寬度為1.6 m,最大工作水深為1.2 m,最大流速1.5 m/s,螺旋槳直徑1.5 m,計算螺旋槳進速如下:

(2)螺旋槳推力與扭矩:

(3)螺旋槳空泡校核:

(4)螺旋槳強度校核
0.25 R處:

0.6 R處:

2.4 水槽造流數值模擬
采用數值模擬的方法對設計的水槽進行驗證,計算采用通用CFD軟件Fluent進行,采用非定常分離隱式求解器、VOF方法、RNGk-ε湍流模型,控制方程采用中心差分格式離散,壓力方程采用Body Force Weighted格式,動量、湍動能、湍動耗散率采用二階迎風格式,壓力速度耦合方式采用PISO方法,結果如圖3所示。
循環水槽的葉片安裝在下端左側,這是因為下端比較長的廊道可起到整流作用,根據模擬結果可知,試驗區流速可達到1.5 m/s以上,且流場穩定,該水槽的設計可滿足試驗需要。
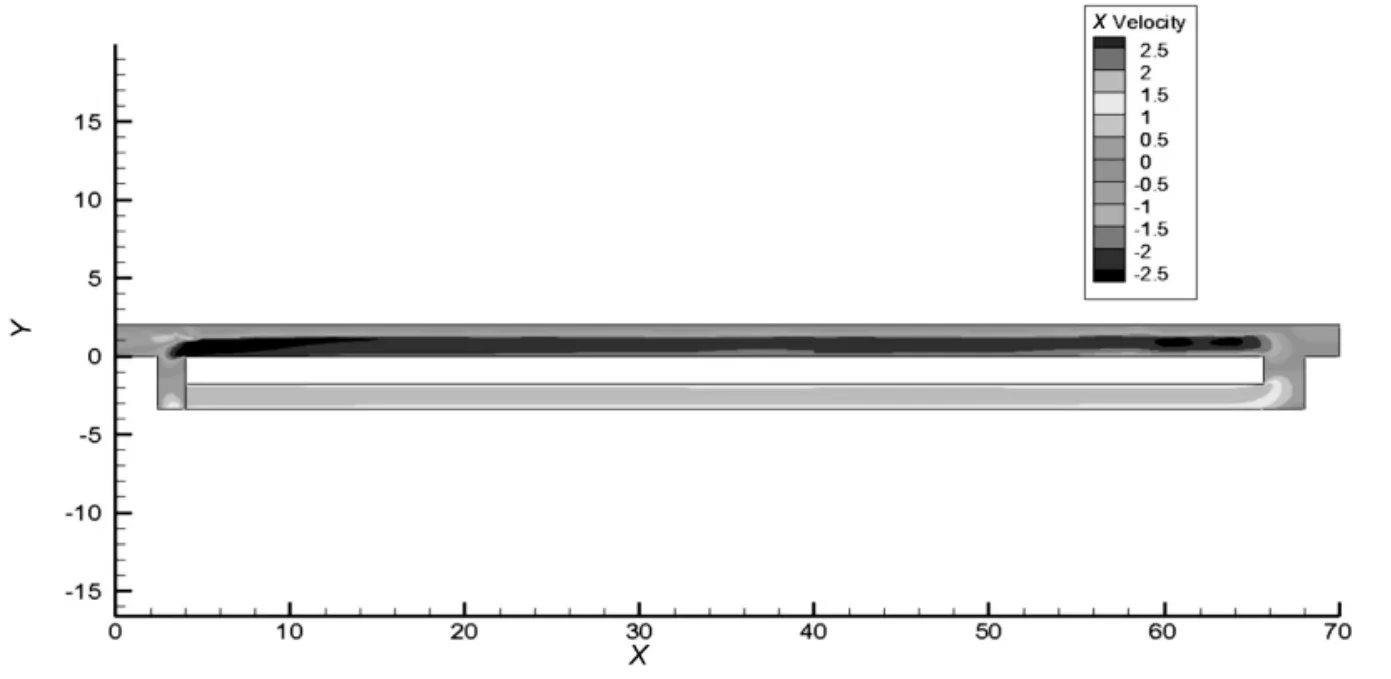
圖3 水槽造流數值模擬結果
3 結語
本文介紹了設計適用于海洋儀器設備垂直循環試驗水槽的流程與方法,并研究了確定水槽相關參數的方法,并針對海洋監測設備動力環境多功能試驗水槽進行了具體設計,最后通過Fluent模擬結果顯示,試驗段流速穩定,可為各類海洋儀器設備模型試驗提供較為理想的流體環境。
[1]Fluent Inc.FLUENT User Defined Function Manual[M].Fluent Inc,2003.
[2]王福軍.計算流體動力學分析-CFD軟件原理與應用[M].北京:清華大學出版社,2004.
[3]徐劍.試論海洋工程水池工藝設計的基本原理[J].造船技術,2008(1):32-35.
[4]孫東昌,張亭健,等.水槽造流系統水力計算與泵機選擇[J].黃渤海海洋,2002,20(2):125-132.
[5]毛丞弘,楊建民,等.海洋深水實驗池造流系統整流裝置數值計算與分析[J].水力學研究與進展,2007,22(4):483-490.
[6]中華人民共和國交通部.JTJ/T 234-2001.波浪模型試驗規程[S].北京:人民交通出版社,2001.
[7]李煒.水力計算手冊[M].北京:中國水利電力出版社,2006.
[8]于昌利.循環水槽系統設計及參數研究[D].哈爾濱:哈爾濱工程大學,2009.
The System Design of Vertical Circulating Water Flume for Marine Instruments and Equipments
LU Kuan,WANG Xiang-nan,XIONG Yan,LI Yan,SONG Yu-ze
(National Ocean Technology Center,Tianjin 300112,China)
Marine dynamic environment experiment simulation is the basis of marine environment monitoring technology and marine energy development technology research.Its purpose is to provide simulation experiment environment for research and testing of marine instruments and equipments.Vertical circulating water flume is extensively applied as it can save more space and have a longer stable flow zone for obtaining the ideal experiment environment.The technological process and method of the whole design of vertical circulating water flume was presented,which provides the technical basis for marine monitoring dynamic environment experiment platform.
marine instruments and equipments;vertical circulating water flume;system design;numerical simulation
P716
B
1003-2029(2012)04-0005-05
2012-04-28
海洋公益性行業科研專項經費資助項目(201005027)
路寬(1982-),男,博士,工程師,主要研究方向為海洋監測動力環境試驗模擬。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
