極低車速下三軸轉(zhuǎn)向車輛機(jī)動(dòng)性的分析與驗(yàn)證
2012-07-23 00:35:52鞏建坡王樹(shù)鳳賀翠華
鞏建坡,王樹(shù)鳳,賀翠華
(山東理工大學(xué)交通與車輛工程學(xué)院,山東淄博255091)
目前的重型汽車大多都是前輪轉(zhuǎn)向,在低速轉(zhuǎn)向行駛時(shí),前后輪運(yùn)動(dòng)軌跡不協(xié)調(diào),轉(zhuǎn)向響應(yīng)慢,轉(zhuǎn)彎半徑急劇增加,機(jī)動(dòng)性惡化導(dǎo)致輪胎磨損非常嚴(yán)重;多軸轉(zhuǎn)向技術(shù)由于后軸或全軸都參與轉(zhuǎn)向,在低速時(shí)前后輪逆相位轉(zhuǎn)向使轉(zhuǎn)彎半徑減小,機(jī)動(dòng)性增強(qiáng),較高速時(shí)前后輪同相位轉(zhuǎn)向,減小甩尾、側(cè)滑的危險(xiǎn),提高了車輛的操縱穩(wěn)定性,因此多軸轉(zhuǎn)向技術(shù)是目前解決上述問(wèn)題的有效手段[1].
國(guó)外已經(jīng)出現(xiàn)較高技術(shù)水平的多軸車輛,但由于多軸車輛與軍工相關(guān)的特殊性,國(guó)外一般都進(jìn)行技術(shù)封鎖.國(guó)內(nèi)的多軸轉(zhuǎn)向技術(shù)水平還比較低,合理的控制策略是研究的關(guān)鍵點(diǎn).目前,主要的控制策略有零質(zhì)心側(cè)偏角、最優(yōu)控制、橫擺率跟蹤、模糊控制等控制方式,在研究多軸車低速下機(jī)動(dòng)性時(shí)往往忽視極低車速下的大轉(zhuǎn)角轉(zhuǎn)向這一特殊狀況,沒(méi)有對(duì)其進(jìn)行深入的研究.重型車輛更看重在較小空間轉(zhuǎn)向時(shí)機(jī)動(dòng)靈活性,因此對(duì)極低車速下大轉(zhuǎn)角轉(zhuǎn)向的研究勢(shì)在必行.本文針對(duì)這一問(wèn)題,以三軸車為研究對(duì)象對(duì)極低速大轉(zhuǎn)角轉(zhuǎn)向進(jìn)行研究,提出以最小轉(zhuǎn)彎半徑為控制目標(biāo)的控制策略,與零質(zhì)心側(cè)偏角控制策略[2]進(jìn)行比較,并做出三軸轉(zhuǎn)向的模型車進(jìn)行了實(shí)驗(yàn)驗(yàn)證.
1 理論分析
1.1 模型及方程
汽車車廂只有平行于地面的平面運(yùn)動(dòng),并且沿x軸的速度u保持不變。因此汽車就只有沿y軸的側(cè)向運(yùn)動(dòng)與繞z軸的橫擺運(yùn)動(dòng)這樣兩個(gè)自由度,汽車的側(cè)向加速度限定在0.4g以下,此時(shí)輪胎側(cè)偏特性處于線性范圍.假設(shè)模型分析中所用到的角度均按照小角度計(jì)算,不考慮車輪縱向力對(duì)輪胎側(cè)偏特性的影響,忽略空氣動(dòng)力的作用并將其簡(jiǎn)化成線性二自由度模型[3-5].線性二自由度簡(jiǎn)化模型如圖1所示.
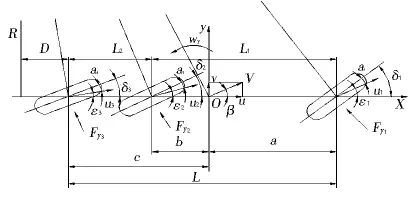
圖1 三軸多輪轉(zhuǎn)向車輛二自由度模型
其中:β為車輛質(zhì)心側(cè)偏角;Wr為橫擺角速度;k1、k2、k3為前軸、中軸及后軸側(cè)偏剛度(為軸上兩輪側(cè)偏剛度之和,取負(fù)值);δ1、δ2、δ3為前輪、中輪及后輪轉(zhuǎn)向角;α1、α2、α3為前、中及后軸側(cè)偏角;a、b、c為前、中、后軸到質(zhì)心距離;Fy1、Fy2、Fy3為地面對(duì)前中后輪側(cè)偏力.
根據(jù)Y軸上的力的平衡公式和繞質(zhì)心力矩的平衡公式,簡(jiǎn)化后得到三軸車的運(yùn)動(dòng)微分方程如下

將三軸車的運(yùn)動(dòng)微分方程用標(biāo)準(zhǔn)狀態(tài)空間方程的形式表示.取狀態(tài)向量為X=[β,輸入向量為U=[δ1δ2,輸出向量為Y,將微分方程(1)經(jīng)過(guò)轉(zhuǎn)變寫成矩陣的形式如下:

由以上轉(zhuǎn)化后的表達(dá)式可求出三軸汽車在極低速大轉(zhuǎn)角時(shí)以零質(zhì)心側(cè)偏角和最小轉(zhuǎn)彎半徑兩種控制方法下前輪角階躍輸入下的瞬態(tài)響應(yīng).
由上可知,當(dāng)知道了三個(gè)軸的轉(zhuǎn)角時(shí),三軸車的運(yùn)行情況也就一目了然,要想控制其運(yùn)行情況就需要控制三個(gè)軸的轉(zhuǎn)動(dòng)角度.因此在低速轉(zhuǎn)向時(shí)如何控制各軸轉(zhuǎn)角的關(guān)系是關(guān)鍵,控制策略的好壞通過(guò)改變各軸之間的轉(zhuǎn)角關(guān)系,從三軸車的運(yùn)動(dòng)性能的變化上體現(xiàn)出來(lái)的.
1.2 控制策略
1.2.1 最小轉(zhuǎn)彎半徑
大轉(zhuǎn)角轉(zhuǎn)向一般在極低的速度下進(jìn)行,對(duì)重型車來(lái)說(shuō)在相對(duì)狹窄的空間內(nèi)轉(zhuǎn)向時(shí)更看重的是車輛的機(jī)動(dòng)靈活性.即保證車輛在正常行駛的情況下車輛轉(zhuǎn)彎半徑最小.因此最小轉(zhuǎn)彎半徑的控制策略在極低速大轉(zhuǎn)角轉(zhuǎn)向時(shí)十分重要.簡(jiǎn)化的結(jié)構(gòu)模型如圖2所示.
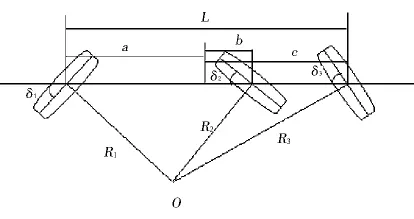
圖2 汽車全輪轉(zhuǎn)向簡(jiǎn)化模型
最小轉(zhuǎn)彎半徑是指轉(zhuǎn)向中心O到外輪偏轉(zhuǎn)角達(dá)到最大值時(shí)與地面接觸點(diǎn)的位置距離[6].當(dāng)多軸轉(zhuǎn)向時(shí)轉(zhuǎn)彎半徑為各轉(zhuǎn)向軸轉(zhuǎn)彎半徑的最大值,即R=max[R1,R2,R3] .
如圖2所示,當(dāng)R1=R3時(shí)轉(zhuǎn)彎半徑最小
由幾何關(guān)系可知δ1和δ2的關(guān)系,

所以有中、后輪與前輪的轉(zhuǎn)角比例關(guān)系

因?yàn)樵诮⒛P蜁r(shí)各軸轉(zhuǎn)角都取的正值,而在極低速轉(zhuǎn)向時(shí)前后輪轉(zhuǎn)動(dòng)方向相反,為了便于區(qū)分轉(zhuǎn)向方向?qū)⒈壤P(guān)系加上一個(gè)負(fù)號(hào).
1.2.2 零質(zhì)心側(cè)偏角
零質(zhì)心側(cè)偏角的控制策略的控制目標(biāo)是整車質(zhì)心側(cè)偏角為零,采用前后輪成比例關(guān)系以及阿克曼定理來(lái)確定后面兩軸與前軸轉(zhuǎn)角的比例關(guān)系[2].
2 實(shí)驗(yàn)車輛的仿真與實(shí)驗(yàn)
2.1 實(shí)驗(yàn)車輛的制作
本實(shí)驗(yàn)所用的模型車是在飛思卡爾智能車模的基礎(chǔ)上改裝的三軸轉(zhuǎn)向車輛.主要由機(jī)械部分、電路部分、控制組成.車輛模型如圖3所示.
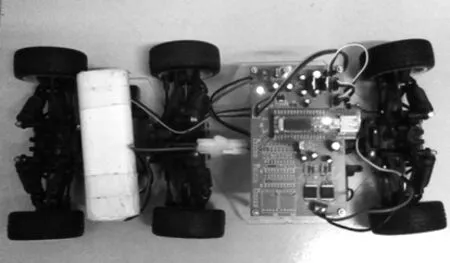
圖3 制作的實(shí)驗(yàn)?zāi)P蛙?/p>
2.1.1 機(jī)械部分
三個(gè)轉(zhuǎn)向軸均采用原車模前軸的機(jī)械結(jié)構(gòu),可根據(jù)實(shí)際需要調(diào)節(jié)車輪的定位.采用硬質(zhì)有機(jī)玻璃代替原先的塑料底盤來(lái)連接各軸,在上面固定電機(jī)、伺服電機(jī)、減速器等機(jī)構(gòu).應(yīng)用模型車原有的減速器、傳動(dòng)軸、差速器將電機(jī)的輸出轉(zhuǎn)變成車輪的轉(zhuǎn)動(dòng),其中模型車的中間軸為驅(qū)動(dòng)軸.
2.1.2 部件的選擇及應(yīng)用
采用高性能增強(qiáng)型1T單片機(jī)STC12C5410AD作為主控芯片,它含有4路PWM用來(lái)控制伺服電機(jī)和驅(qū)動(dòng)電機(jī).本實(shí)驗(yàn)采用MP3遙控器和一體化接收頭HX1838來(lái)遙控車輛,采用直流電機(jī)RS380-ST來(lái)驅(qū)動(dòng)電機(jī)帶動(dòng)小車的行駛,電機(jī)的驅(qū)動(dòng)用BTS7960來(lái)搭建電機(jī)驅(qū)動(dòng)電路.用OME-NФ18光電編碼器來(lái)作為車速傳感器以便完成對(duì)車速的閉環(huán)控制,采用S3010伺服電機(jī)來(lái)帶動(dòng)轉(zhuǎn)向機(jī)構(gòu)完成轉(zhuǎn)向.采用7.2V充電電池為整個(gè)系統(tǒng)供電,通過(guò)設(shè)計(jì)電源轉(zhuǎn)換電路來(lái)為單片機(jī)、直流電機(jī)以及伺服電機(jī)供電.
2.1.3 控制部分
三軸車前軸的轉(zhuǎn)向、速度、轉(zhuǎn)向模式、轉(zhuǎn)角都是由遙控按鍵來(lái)控制.為了保證模型車輛的速度不受外界其它因素的影響,電機(jī)的控制采用PID控制策略.單片機(jī)根據(jù)前軸的轉(zhuǎn)角以及采集到的數(shù)據(jù),運(yùn)用零質(zhì)心側(cè)偏角和最小轉(zhuǎn)彎半徑的控制策略計(jì)算出后兩輪的轉(zhuǎn)角值,通過(guò)產(chǎn)生PWM脈沖信號(hào)控制后兩軸的伺服電機(jī)帶動(dòng)轉(zhuǎn)向機(jī)構(gòu)完成轉(zhuǎn)向,從而實(shí)現(xiàn)多軸轉(zhuǎn)向.結(jié)構(gòu)框圖如圖4所示.
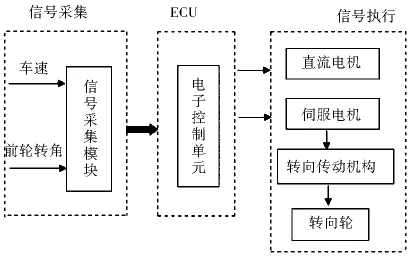
圖4 控制部分模型框圖
2.2 操縱穩(wěn)定性仿真分析
以制作的三軸模型車汽車為運(yùn)動(dòng)仿真對(duì)象,其結(jié)構(gòu)參數(shù)見(jiàn)表1.

表1 車輛動(dòng)力學(xué)參數(shù)
在這里采δ1=24°,u=0.4m/s時(shí)進(jìn)行轉(zhuǎn)向的分析,應(yīng)用Matlab軟件對(duì)比例前饋控制的三軸汽車轉(zhuǎn)向時(shí)以零質(zhì)心側(cè)偏角為控制目標(biāo)的全輪轉(zhuǎn)向和以最小轉(zhuǎn)彎半徑為控制目標(biāo)的橫擺角速度、質(zhì)心側(cè)偏角的時(shí)域響應(yīng)特性.
極低速大轉(zhuǎn)角轉(zhuǎn)向時(shí)仿真輸出的橫擺角速度與質(zhì)心側(cè)偏角階躍響應(yīng)特性曲線如圖5所示.
圖5中的Rmin和Omin分別指在最小轉(zhuǎn)彎半徑和零質(zhì)心側(cè)偏角控制策略。從圖5(a)圖可以發(fā)現(xiàn),低速下三軸汽車以最小轉(zhuǎn)彎半徑為控制目標(biāo)時(shí)車輛的穩(wěn)態(tài)橫擺角速度比以零質(zhì)心側(cè)偏角為控制目標(biāo)的橫擺角速度高,這表明低速以最小轉(zhuǎn)彎半徑為控制目標(biāo)三軸汽車轉(zhuǎn)彎半徑小,更容易轉(zhuǎn)向,即低速機(jī)動(dòng)性好;在同一車速下,兩種控制目標(biāo)的汽車橫擺角速度達(dá)到各自穩(wěn)態(tài)值的時(shí)間基本相同.從圖5(b)可以看出三軸汽車以最小轉(zhuǎn)彎半徑為控制目標(biāo)時(shí)質(zhì)心側(cè)偏角的穩(wěn)態(tài)值不等于零,但值非常接近零,說(shuō)明以最小轉(zhuǎn)彎半徑為控制目標(biāo)時(shí)車輛轉(zhuǎn)彎穩(wěn)定性比較好,可以采用.
2.3 實(shí)車實(shí)驗(yàn)
根據(jù)零質(zhì)心側(cè)偏角和最小轉(zhuǎn)彎半徑的控制策略分別編寫單片機(jī)控制程序使模型車以0.4m/s的速度、前輪轉(zhuǎn)角大約24°行駛,按照小車的行駛路線畫(huà)出其軌跡,通過(guò)比較軌跡即可驗(yàn)證理論的準(zhǔn)確與否.實(shí)驗(yàn)驗(yàn)證如圖6所示.

圖5 三軸車在兩種不同控制方法下的橫擺角速度與質(zhì)心側(cè)偏角階躍響應(yīng)
圖6 模型車轉(zhuǎn)向軌跡圖
圖6中軌跡線由上到下依次是單前軸轉(zhuǎn)向、零質(zhì)心側(cè)偏角控制下全軸轉(zhuǎn)向和最小轉(zhuǎn)彎半徑控制策略下的全軸轉(zhuǎn)向的運(yùn)動(dòng)軌跡.為了便于數(shù)字比較測(cè)量轉(zhuǎn)彎半徑,比較結(jié)果見(jiàn)表2.

表2 轉(zhuǎn)彎半徑比較m
由表2可知,在相同的前軸轉(zhuǎn)角和速度下最小轉(zhuǎn)彎半徑的控制策略比零質(zhì)心側(cè)偏角的控制策略的轉(zhuǎn)向半徑更小,也更靈活.同樣實(shí)驗(yàn)驗(yàn)證其他速度和轉(zhuǎn)角設(shè)置都是最小轉(zhuǎn)彎半徑的策略下轉(zhuǎn)彎半徑最小,所以可驗(yàn)證本文理論研究的正確性.
3 結(jié)束語(yǔ)
本文對(duì)低速下三軸汽車全輪轉(zhuǎn)向的機(jī)動(dòng)性進(jìn)行了研究.建立了三軸車的二自由度模型,推導(dǎo)了二自由度模型的運(yùn)動(dòng)微分方程;就極低速大轉(zhuǎn)角轉(zhuǎn)向這一特殊工況提出了最小轉(zhuǎn)彎半徑為目標(biāo)的控制策略,仿真分析與實(shí)車實(shí)驗(yàn)驗(yàn)證結(jié)果表明,三軸全輪轉(zhuǎn)向車在極低速大轉(zhuǎn)角下采用最小轉(zhuǎn)彎半徑為控制目標(biāo)具有很好的機(jī)動(dòng)性.
[1] 高秀華,張春秋,李炎亮,等.多軸轉(zhuǎn)向系統(tǒng)轉(zhuǎn)向控制模式綜述[J] ,起重運(yùn)輸機(jī)械,2006(6):5-8.
[2] 張春秋,高秀華,楊旭,等.三軸車輛全輪轉(zhuǎn)向操縱穩(wěn)定性仿真分析[J] ,農(nóng)業(yè)裝備與車輛工程,2007(9):9-12.
[3] Guan X Q,Zhang J W,Qu Q Z.Design of model following variable structure controller for three-axle vehicle[J] .Journal of Donghua University(English),2003(1):100-104.
[4] 喻凡,林逸.汽車系統(tǒng)動(dòng)力學(xué)[M] .北京:機(jī)械工業(yè)出版社,2000:211-300.
[5] 王樹(shù)鳳,張俊友,李華師,等.不同轉(zhuǎn)向模式的多軸轉(zhuǎn)向車輛的性能分析[J] .公路交通科技.2008,25(12):184-187.
[6] 陳家瑞,汽車構(gòu)造[M] .北京:人民交通出版社,2005:269-271.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
