板簧搬運機(jī)械手軌跡規(guī)劃研究
2012-07-23 00:35:52姜倩倩李素玲陳大偉
山東理工大學(xué)學(xué)報(自然科學(xué)版) 2012年2期
關(guān)鍵詞:規(guī)劃
姜倩倩,李素玲,陳大偉
(山東理工大學(xué)電氣與電子工程學(xué)院,山東淄博255091)
汽車板簧一般質(zhì)量都比較大,國內(nèi)用于汽車板簧搬運的多是人工搬運或者是橫梁式的平面搬運機(jī)械手.人工搬運勞動強(qiáng)度大,效率低;而平面機(jī)械手在一定程度上又顯得不夠靈活,作業(yè)精確度與作業(yè)效率較低,為此設(shè)計了一種五軸驅(qū)動的關(guān)節(jié)型機(jī)械手,能夠準(zhǔn)確、快速地完成板簧搬運.
機(jī)械手軌跡規(guī)劃是機(jī)械手運動控制中的一項核心工作,它直接影響著控制的準(zhǔn)確性和快速性.為了保證機(jī)械手能夠高速、平穩(wěn)的到達(dá)指定位置,提高整個機(jī)械手系統(tǒng)的穩(wěn)定性和可靠性,在操作機(jī)械手之前對其進(jìn)行軌跡規(guī)劃,就會避免機(jī)械手位置、速度、加速度實變等不良現(xiàn)象發(fā)生.
1 機(jī)械手的系統(tǒng)組成
機(jī)械手的自由度數(shù)目應(yīng)與所要完成的任務(wù)相匹配,本系統(tǒng)中,為了使板簧搬運機(jī)械手能在空間中完成搬運任務(wù),將其自由度數(shù)目定為5個,即此搬運機(jī)械手有五個關(guān)節(jié):腰部、肩關(guān)節(jié)、肘關(guān)節(jié)上分別有一個轉(zhuǎn)動關(guān)節(jié),可實現(xiàn)機(jī)械手的旋轉(zhuǎn)、升降、擺動;末端上的自由度數(shù)目為2,有兩個轉(zhuǎn)動關(guān)節(jié)分別可以使腕部俯仰、手爪旋轉(zhuǎn).此板簧搬運機(jī)械手系統(tǒng)由機(jī)械本體(執(zhí)行機(jī)構(gòu))、控制系統(tǒng)、伺服驅(qū)動系統(tǒng)和檢測傳感裝置等構(gòu)成,是一種仿人操作、自動控制、可重復(fù)編程、能在三維空間完成各種作業(yè)的機(jī)電一體化自動生產(chǎn)設(shè)備.其中,執(zhí)行機(jī)構(gòu)即為串聯(lián)型五關(guān)節(jié)的機(jī)械手本體,包括腰部、肩關(guān)節(jié)、肘關(guān)節(jié)、腕關(guān)節(jié)、大臂、小臂和平行氣控手抓(安裝在腕關(guān)節(jié)上).由于機(jī)械手持重比較大,在升降軸和擺動軸之間安裝了平衡氣缸,同時,根據(jù)每個關(guān)節(jié)的速度要求,計算出合適的減速比,選擇合適的減速裝置和傳動裝置.機(jī)械手的機(jī)構(gòu)簡圖如圖1所示.驅(qū)動系統(tǒng)采用伺服電機(jī);盡管氣壓驅(qū)動系統(tǒng)具有結(jié)構(gòu)簡單、無污染的特點,但其輸出力矩較小;而液壓驅(qū)動系統(tǒng)可獲得大的輸出力,但是油液易產(chǎn)生泄露而影響運動精度.傳感檢測系統(tǒng)選用絕對式編碼器檢測每個關(guān)節(jié)的轉(zhuǎn)動角度.控制系統(tǒng)采用以PC機(jī)為核心的集中控制方式,選用眾為興數(shù)控技術(shù)有限公司研制的基于PCI總線的高性能ADT-856運動控制卡.其中,PC機(jī)主要完成人機(jī)交互界面的管理和控制系統(tǒng)的實時監(jiān)控,運動控制卡利用脈沖與方向信號的輸出控制機(jī)械手各運動模塊的伺服驅(qū)動器.機(jī)械手的系統(tǒng)控制、軌跡規(guī)劃的工作原理如圖2所示.
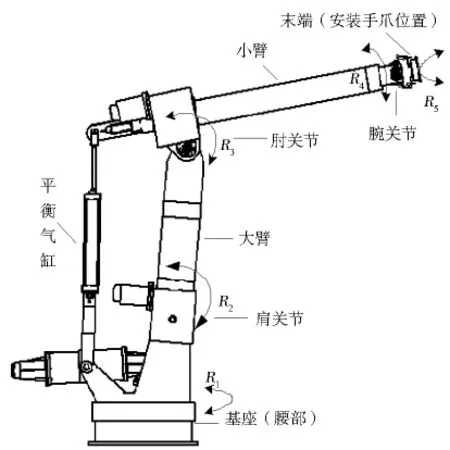
圖1 機(jī)械手機(jī)構(gòu)簡圖

圖2 機(jī)械手工作原理圖
2 機(jī)械手運動學(xué)模型的建立
機(jī)械手運動學(xué)問題的主要研究內(nèi)容是機(jī)械手各連桿間的位置關(guān)系、速度關(guān)系和加速度關(guān)系,分為運動學(xué)正分析(正運動學(xué)問題)和運動學(xué)逆分析(逆運動學(xué)問題)兩部分.它們?yōu)檠芯寇壽E規(guī)劃問題提供了理論基礎(chǔ).正運動學(xué)問題是在已知機(jī)械手桿件的DH參數(shù)和關(guān)節(jié)角θ(t)的情況下,求解末端執(zhí)行器相對于參考坐標(biāo)系的位姿,其解是唯一的、確定的.而逆運動學(xué)問題,是在已知手部末端空間位姿的情況下,求解出關(guān)節(jié)變量,其解是不唯一的[1],主要用于機(jī)械手的控制及軌跡規(guī)劃.
機(jī)械手的軌跡規(guī)劃是在機(jī)械臂運動學(xué)和動力學(xué)的基礎(chǔ)上,研究關(guān)節(jié)空間和笛卡兒空間中機(jī)械手運動的軌跡生成方法.無論是在哪種空間中規(guī)劃,分析運動學(xué)正逆解問題和軌跡規(guī)劃都需要先建立坐標(biāo)系,確定D-H參數(shù),才能建立運動學(xué)模型.利用D-H參數(shù)建模法建立其運動學(xué)坐標(biāo)系(參考坐標(biāo)系)如圖3所示,坐標(biāo)系的建立方法見參考文獻(xiàn)[2] .5個旋轉(zhuǎn)關(guān)節(jié)的角度:θ1,θ2,θ3,θ4,θ5為關(guān)節(jié)變量,當(dāng)確定了機(jī)械手各連桿坐標(biāo)系后,便可以列出各連桿參數(shù),見表1,連桿參數(shù)的具體定義見參考文獻(xiàn)[3] .連桿參數(shù)確定后,直接寫出相鄰兩坐標(biāo)系間的變換矩陣為
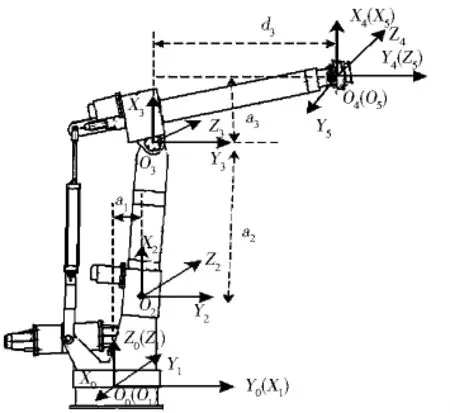
圖3 機(jī)械手坐標(biāo)系示意圖
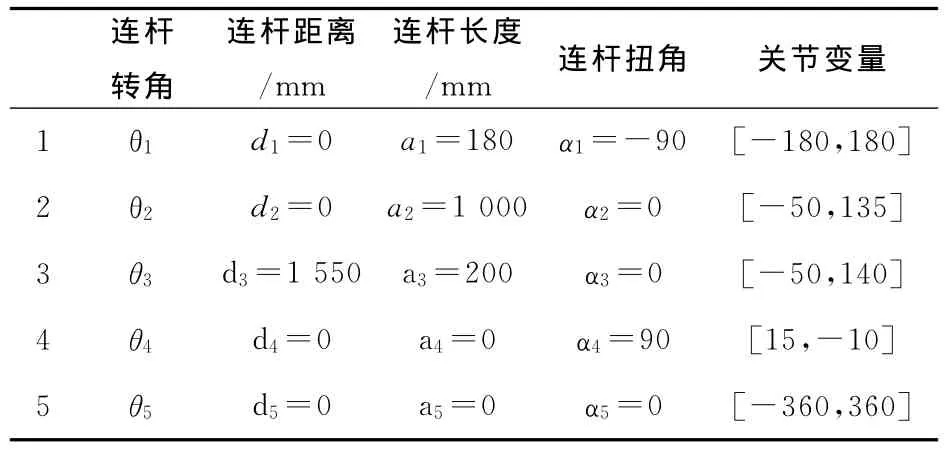
表1 板簧搬運機(jī)械手的D-H參數(shù)_
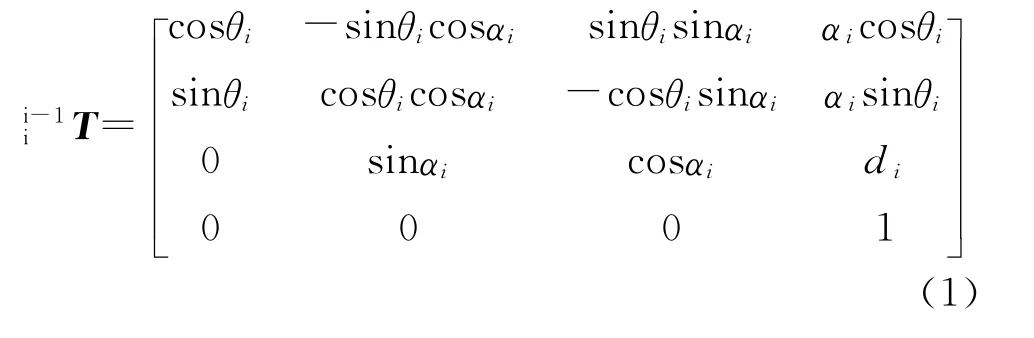
在此基礎(chǔ)上,給出的機(jī)械臂運動方程為

其中,矢量n,o,a為含有未知數(shù)θi的表達(dá)式,表示末端執(zhí)行器相對于基坐標(biāo)的姿態(tài);矢量p表示坐標(biāo)系{5}的原點在坐標(biāo)系{0}中的位置矢量[4].公式(2)所示運動方程表示末端連桿坐標(biāo)系{5}相對于基坐標(biāo)系{0}的位姿.
3 機(jī)械手的軌跡規(guī)劃
工業(yè)機(jī)器人最常用的兩種軌跡規(guī)劃方法是關(guān)節(jié)空間規(guī)劃法和笛卡爾空間規(guī)劃法[5].不論是在關(guān)節(jié)坐標(biāo)系下規(guī)劃,還是在直角坐標(biāo)系下進(jìn)行規(guī)劃,都必須滿足所規(guī)劃的軌跡是連續(xù)和平滑的,從而使機(jī)械臂運動平穩(wěn).
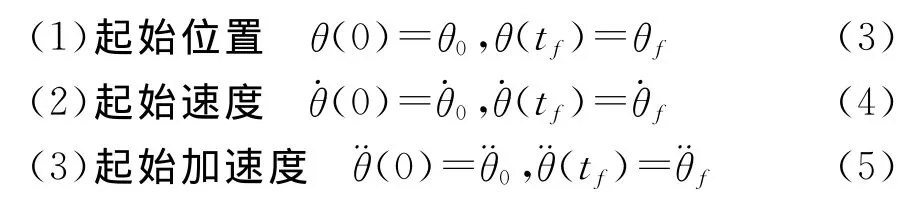
本文采用關(guān)節(jié)空間五次多項式插補(bǔ)算法.考慮到實際應(yīng)用中板簧的質(zhì)量一般在100~150kg,搬運機(jī)械手運動過程中速度不能太快,所以本文不考慮時間最優(yōu)的問題,只要保證運動過程安全、平穩(wěn).當(dāng)滿足一定約束條件(只考慮運動學(xué)約束,不考慮力學(xué)),搬運機(jī)械手在路徑無障礙下PTP運動時,需要給出機(jī)械手起始點、終止點手爪的位姿.在整個時間[t0,tf] 內(nèi),五次多項式插補(bǔ)算法,不僅可以保持位置和速度同時連續(xù),還可以保證加速度不發(fā)生突變[6].取θ(t)在t=0時刻的值是起始關(guān)節(jié)角度θ0,在終端時刻tf的值是終止關(guān)節(jié)角度θf.為實現(xiàn)關(guān)節(jié)的平穩(wěn)運動,軌跡函數(shù)θ(t)滿足如下約束條件:
取五次多項式為

由約束條件得


根據(jù)公式(7)~(9)可以解出a0,a1,a2,a3,a4,a5五個未知數(shù),帶入公式(6),便可得到一個兩端端點速度不為零的軌跡的插補(bǔ)五次多項式為

公式(10)是對單個關(guān)節(jié)的軌跡插值計算,對于五個關(guān)節(jié)的機(jī)械手,有5個不同的tif時間,需要考慮5個關(guān)節(jié)運動的協(xié)調(diào),主要是通過同時啟動、同時停止的控制思想來保證.所以整體的插補(bǔ)時間tf=max(tif),為機(jī)械手從起始點A點運動到終止點B點的時間.起始處A點的五個關(guān)節(jié)角已知為JA=[θ10θ20θ30θ40θ50] ,B點的五個關(guān)節(jié)角由所給的末端執(zhí)行器位姿,通過運動學(xué)逆解來求得JB=[θ1fθ2fθ3fθ4fθ5f] ,由A點到B點之間持續(xù)的時間為tif=|θif-θi0|/ωimax(i=1,2,3,4,5).
4 仿真結(jié)果及分析
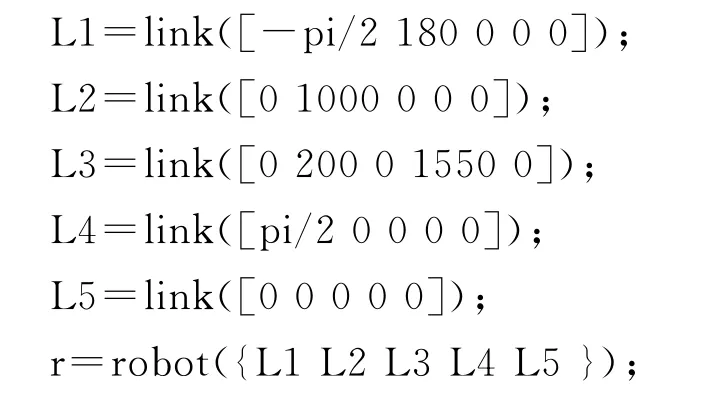
以MATLAB軟件的robot工具箱作為仿真平臺,利用表1所給出的機(jī)械手連桿參數(shù),建立機(jī)械手運動學(xué)仿真模型.Link()函數(shù)的前4個元素依次為α,h,θ,d,最后一個為0(轉(zhuǎn)動關(guān)節(jié)),構(gòu)建機(jī)械手模型的主要命令如下:
r.name='五軸板簧搬運機(jī)械手';
drivebot(r)
由此可得到機(jī)械手的三維圖如圖4所示.
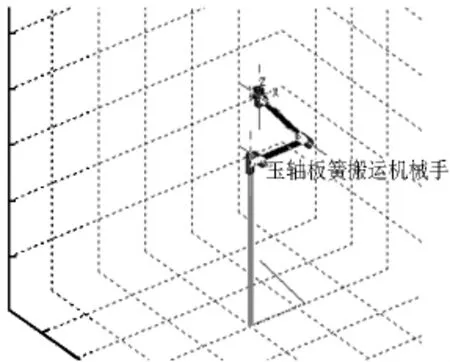
圖4 機(jī)械手的三維建模圖(起始位置)
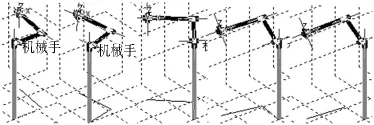
圖5 機(jī)械手運動過程示意圖
分別求出插值多項式θ(t)后,利用MATLAB仿真得到機(jī)械手五個關(guān)節(jié)的角度曲線、角速度曲線、角加速度曲線分別如圖6、圖7、圖8所示,圖中曲線光滑且連續(xù).這說明采用5次多項式插補(bǔ)生成軌跡的方法,位移和速度曲線連續(xù),即可實現(xiàn)實際中平滑的軌跡;而加速度曲線的連續(xù),則說明機(jī)械手末端不會產(chǎn)生振動,保證了機(jī)械手工作的平穩(wěn)性.

圖6 五個關(guān)節(jié)的角度位置曲線

圖7 五個關(guān)節(jié)的角速度曲線

圖8 五個關(guān)節(jié)的角加速度曲線
機(jī)械手將汽車板簧從一處搬到另一處時,除了要給定起始點和終止點外,還應(yīng)給出幾個中間的經(jīng)過點,如圖9所示.與教學(xué)實驗所用機(jī)器人相比,板簧搬運機(jī)械手所搬質(zhì)量一般比較大,通常實際應(yīng)用中,機(jī)械手的運動要經(jīng)過如圖9所示幾點,所以可以將整個運動過程的軌跡分成幾段,而每一段則直接采用上述的五次多項式插值的方法連接相鄰的兩個點,為了不使中間點產(chǎn)生停頓,還可以在中點上制定期望的速度.
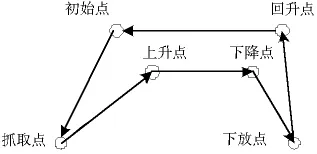
圖9 機(jī)械手搬運過程示意圖
5 結(jié)束語
采用D-H參數(shù)法推導(dǎo)出五自由度關(guān)節(jié)型板簧搬運機(jī)械手的運動學(xué)模型,利用MATLAB軟件和robot工具箱進(jìn)行機(jī)械手建模與仿真,可以清晰看出機(jī)械手軌跡規(guī)劃運動的仿真結(jié)果,能夠較好地反映出機(jī)械手的實際運行情況.五次多項式插值函數(shù)進(jìn)行規(guī)劃可以使板簧搬運機(jī)械手的五個運動關(guān)節(jié)角速度時間曲線、角加速度時間曲線變化都是連續(xù)平滑的.保證機(jī)器人在運動過程中運行平穩(wěn),沒有沖擊現(xiàn)象.
[1] 梅鐵洲.IRB1400型機(jī)器人的運動分析及運動控制[D] .上海:海事大學(xué),2005.
[2] 朱世強(qiáng),王宣銀.機(jī)器人技術(shù)及其應(yīng)用[M] .杭州:浙江大學(xué)出版社,2007.
[3] 李玲.六自由度機(jī)器人運動學(xué)三維圖形仿真研究[D] .大連:大連海事大學(xué).2008.
[4] 姜明軍.六自由度機(jī)器人運動軌跡優(yōu)化控制[D] .大慶:大慶石油學(xué)院.2009.
[5] 顏世周.一種六自由度機(jī)器人的開發(fā)與軌跡規(guī)劃算法研究[D] .淄博:山東理工大學(xué),2004.
[6] 韓軍,郝立.機(jī)器人關(guān)節(jié)空間的軌跡規(guī)劃及仿真[J] .南京理工大學(xué)學(xué)報.2000,24(6):540-543.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
