探討微機控制變頻器在電梯控制系統(tǒng)中的應用
2012-07-24 09:28:36馮威倫
中國新技術新產品 2012年2期
馮威倫
(日立電梯(中國)有限公司廣州分公司,廣東 廣州 510627)
引言
隨著我國高層建筑的發(fā)展,對于電梯的要求也在不斷的提高,從安全性到現(xiàn)在智能化的要求。電梯發(fā)展初始,電梯電氣部分采用的是繼電接觸器控制系統(tǒng),故障率高,乘坐舒適感較差,嚴重影響電梯運行質量。但是隨著計算機技術的發(fā)展,控制變頻器彌補了繼電器控制的缺點。
零速滿轉矩——由ACS600帶動的電動機能夠獲得在零時電動機的額定轉矩,并且不需要光碼盤或測速電機的反饋。而矢量控制變頻器只能在接近零速時實現(xiàn)滿力矩輸出。這一特點應用在電梯行業(yè)優(yōu)于其他品牌變頻器。DTC提供的精確的轉矩控制使得ACS600能夠提供可控且平穩(wěn)的最大起動轉矩(最大起動轉矩能達到200%的電動機額定轉矩)。
精確速度控制——ACS600的動態(tài)轉速誤差在開環(huán)應用為0.4%,在閉環(huán)應用時為0.1%。而矢量控制變頻器在開環(huán)時大于0.8%,閉環(huán)時為 0.3%。ACS600變頻器的靜態(tài)精度為0.01%。
ACs600變頻器的應用使產品具有很寬的功率范圍、優(yōu)良的速度控制和轉矩控制特性、完整的保護功能以及靈活的編程能力、結合上位機系統(tǒng),構成一個適用于各種類型的應用產品,有6向位控制起升設備特殊需求的用戶,可采用ACC600系列專用位勢變頻器。
系統(tǒng)總體構成及原理
1微機控制的電梯已逐漸取代老式的繼電器控制的電梯,它適用于數(shù)字調速系統(tǒng)便于應用變頻器,而且功能靈活多變,結構緊湊,免去了許多復雜的接線,提高了系統(tǒng)的可靠性。本系統(tǒng)主要由微機、變頻器和拖動系統(tǒng)組成,系統(tǒng)結構如圖1所示。
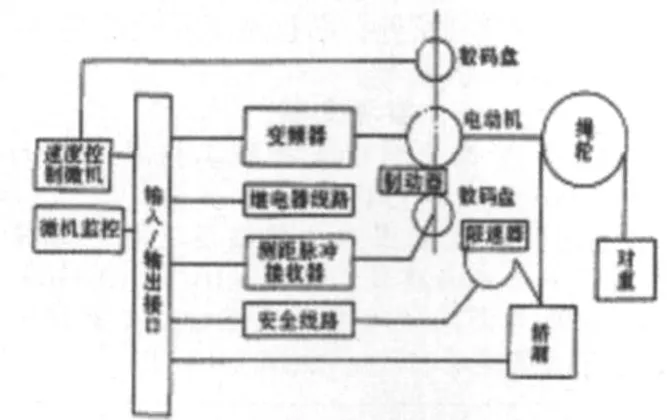
圖l微機控制電梯控制框圖
一般交流調速電梯速度不超過1.75m/s,采用ACS600系列變頻器,電梯操作系統(tǒng)控制模塊由工業(yè)控制計算機及外圍接口組成,它是電梯邏輯運行的控制核心。采集電梯運行狀態(tài)信號,以決定電梯運行方式,包括有/無司機、運行、檢修、門鎖保護、急停保護、消防運行及故障慢車運行等。它也采集各樓層的高速模型相結合使電機的呼梯信號及轎廂內選層信號,根據(jù)電梯所在位置決定電梯運行方向;它向ACS600變頻器發(fā)出控制命令信號,包括速度信號和速上下行駛信號,保證電梯安全可靠運行。由變頻器構成拖動模塊,采用ABB生產的ACS600系列變頻器。從控制模塊接收速度信號和上下行駛信號,按內部設定運行曲線對電梯拖動系統(tǒng)實現(xiàn)速度控制,完成電梯的靈活調速、控制、高精度平層和提高乘坐舒適感等功能。
2.控制系統(tǒng)的硬件組成
控制模塊采用總線結構。根據(jù)電梯運行原理及實現(xiàn)的功能,設計系統(tǒng)硬件,圖2為模塊結構圖。它由CPU板,輸入輸出板,開關電源以及總線基架組成。其中CPU板由單片機、64K程序存儲器、64K數(shù)據(jù)存儲器、2路16位定時/計數(shù)器、2路RS-232接口、8路并行 I/0 接口組成。
該模塊可通過RS-232接口實現(xiàn)與上序的離線或在線編輯、匯編、監(jiān)控和調試,給程序的編寫及現(xiàn)場調試帶來很大的方便。微機的輸入、輸出信號的電平、傳遞速度、傳遞方式通常都有要求,這就需要接口電路來協(xié)調,以使接收控制信號可靠地控制繼電器和接觸器的工作。我們采用的是光電隔離32路開關輸入、輸出板,可以消除公共地線和電源的干擾,從而使工業(yè)設備和微機系統(tǒng)可靠工作。輸入板是光電隔離32路開關量。

圖2 工作模塊結構圖
輸入板STD5372板,它是一種帶光電耦合器件的開關量輸入板,可以實現(xiàn)總線與被測工業(yè)設備或數(shù)字儀器之間的光電隔離,32個開關量輸入,占用4個連接的口地址,采用單端輸入,工作模式為CPU掃描輸入。輸入板實現(xiàn)對各樓層上(下)行外呼梯信號的采集;實現(xiàn)對轎廂內選信號及電梯運行狀態(tài)信號的采集;實現(xiàn)對電梯井道信號和保護信號的采集;及相應的輸出信號;接口與總線的連接(見圖 3)。

圖3 接口與數(shù)據(jù)總線的連接
電梯的運行方向,樓層的信號,都由指示燈輸出顯示,我們使用的是發(fā)光三極管,因為它耗電少無需太大的驅動接口,配合矩陣方式可以減少元器件的個數(shù)。微機控制系統(tǒng)產生速度指令曲線比一般電梯要靈活的多。它采用數(shù)模轉換器D/A,將微機送來的數(shù)字量轉變?yōu)槟M量,構成速度指令曲線。只要微機給出的數(shù)字不同就可以得到不同的指令曲線,因此微機根據(jù)運行距離長短,速度快慢給出不同的數(shù)字就可以得到不同的指令曲線。控制電梯緩起、加速、緩停,
使乘梯人沒有不舒適的感覺。
電腦電梯大多省去選層器,而電梯在運行中必須知道自己所處的位置,才能正確指層,正確選擇減速點,正確平層。為此需要一個裝置,能計算電梯行走的距離,再與內存中每一層的高度相比較就知道現(xiàn)在是在第幾層,需要向什么方向行駛,要在第幾層停止,以便發(fā)出相應命令。計算電梯運行距離的方法很多,較為簡單的方法是采用光電碼盤。這樣只要用計數(shù)器計算出光碼盤的脈沖數(shù),就可知道電梯運行的距離。
3.制動單元的選擇
在變頻器應用中,當轎廂空載上升或重載下降時,拖動系統(tǒng)都存在位能負荷下放,電動機將處于再生發(fā)電制動運行狀態(tài),使從電動機回饋的能量通過逆變環(huán)節(jié)中并聯(lián)的二極管流向直流環(huán)節(jié)充電,當回饋的能量較大時,會引起直流環(huán)節(jié)電壓升高,對變頻器逆變橋構成危險,發(fā)生故障;電動機急劇減速也會造成上述現(xiàn)象。解決的辦法是在變頻器直流環(huán)節(jié)上并接制動單元和制動電阻。
(1)制動單元
制動單元是變頻器的一個可選組件,其內設有檢測和控制電路,其工作時對變頻器的直流回路電壓在線檢測,當電壓值超過設定允許值時,滯環(huán)比較器翻轉,經邏輯轉換后觸發(fā)制動晶體管導通,經過電阻釋放能量使電壓降低,維持變頻器正常工作。一個制動單元并接幾個制動電阻,需根據(jù)實際工況計算選擇。
(2)制動電阻的選擇
變頻器在采用制動單元時,必須做到不同功率的制動單元與其相應功率的制動電阻相配合,以達到擴展制動功率的目的,在外接制動電阻進行制動的情況下,電阻應能在系統(tǒng)再生時吸取負載回饋電能的80%,其余20%可通過電動機以熱能耗散。此時制動電阻值
R=U/CD21.047(TB一0.2TM)n1
式中UCD-----直流電壓,對400V變頻器取值 760(V);
TM-----電動機的額定轉矩(N·m);
TB一制動轉矩(N·m)。
制動轉矩TB可按下式計算
TB=(GD+GD)(n1—n2)/375tS-TL
式中GDM2電動機的飛輪力矩(N·m2);
GDL2一負載折算到電動機軸上的飛輪力矩(N·m2);
TL——負載轉矩(N·m);
tS---減速時間(s);
n1、n2------減速前、后的速度(r/min)。
制動電阻的平均功率可按下式計算
P=1.047 (TB一 0.2T)【(n1—n2)/2】×10-3(Kw)
再根據(jù)制動電阻的平均功率和電阻允許增加系數(shù)計算出電阻的額定功率。如下式
Pe=P/m
式中Pe一制動電阻的額定功率;
m一制動電阻的允許增加系數(shù),根據(jù)制動時間選擇。
結論
微機控制電梯,可以改善電梯的運行質量及效率和節(jié)約電能,使得搭載電梯的人不會感覺到有不適合的情況發(fā)生,所以最重要的是對于整個調速變頻的了解,本文針對我國電梯業(yè)的現(xiàn)狀,將微機控制變頻器用于電梯控制,使電梯達到了較為理想的控制效果。
[1]嚴盈富,羅海平,屋海勤.監(jiān)控組態(tài)軟件與PLC入門[M].北京:人民郵電出版社,2006.
[2]鄧則名.鄺惠芳,等,電氣與可編程控制器應用技術[M].機槭工業(yè)出版社,2004.
[3]陳立定,吳玉香,蘇開才.電氣控制與可編程控制器 [M].廣州:華南理工大學出版社,2001.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
防爆電機(2020年3期)2020-11-06 09:07:42
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
測控技術(2018年5期)2018-12-09 09:04:50
電子制作(2018年11期)2018-08-04 03:25:42
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
電子制作(2017年7期)2017-06-05 09:36:13
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
小說月刊(2015年4期)2015-04-18 13:55:18
