污水處理系統加藥泵模糊PID控制研究*
2012-07-25 03:19:26徐立軍吳春艷
微處理機 2012年4期
徐立軍,吳春艷,段 英
(新疆工業高等專科學校,烏魯木齊830091)
1 引言
目前,農用地膜在我國農業生產中使用非常普遍。農用地膜屬于聚乙烯類,且絕大多數地膜均為不可降解地膜,即使是有降解處理也會用至少30年深埋地下才能消食,屬于白色污染,國家政策正在實施強制性回收。如果能夠把地膜全部回收再利用,將對減少白色污染起到積極作用。同時,回收的地膜經過清洗、造粒、烘干等工藝處理,可以作為塑料制品行業的廉價原料,降低塑料制品的成本,在有的地方再生塑料已經成為一個產業[1]。
回收地膜在清洗過程中需要耗費大量清水。通過對新疆回收地膜清洗企業的調研,作者發現幾乎所有的此類作業使用的設備均為手動或半自動設備,沒有成熟的專用污水處理系統,水資源浪費嚴重且對周邊環境造成了污染。針對這種情況,項目組設計了一套回收地膜清洗污水處理專用自動系統,并在新疆優力塑料制品有限公司進行了實驗。結果表明,用自動控制系統代替原有的人工控制以及繼電器控制,可以極大降低投資,減小勞動強度,并可有效降低成本。設備運行可靠,可維護性好,具有一定的靈活性,并能實現整個水處理系統的管理和監控,詳細內容見參考文獻[1]。
在該污水處理自動控制系統中,混凝劑投放是一個關鍵技術,它決定了水中懸浮雜質顆粒的聚結和顆粒成長的質量及其沉降特性,其效果好壞直接關系到處理后的水質能否滿足工藝要求,并且關系到后續工藝及整個水處理的成本。但因混凝機理目前仍未有明確的解釋,更不存在一個統一精確的數學模型。實驗研究中也發現混凝的影響因素很多,有原水濁度、PH值、堿度、電導率、水溫、雜質類別及混凝時間、水力條件等等。這就使得這一過程存在非線性、時滯性、模糊性等問題。系統原先采用傳統的PID控制,但控制效果不理想,輸出量經常會反復出現震蕩且調節參數難以準確確定。
為了有效解決上述問題,項目組嘗試使用了模糊PID控制法,以期系統具有更好的處理效果。
2 投藥模糊PID控制系統結構
系統結構如圖1所示。由模糊控制器、輸入/輸出接口、檢測裝置、執行機構等構成。
(1)模糊控制器。是模糊控制系統的核心,也是該模糊系統區別于傳統PID控制系統的標志,硬件部分由三菱FX2N-32MR構成。
(2)輸入/輸出接口。是實現控制器與接收信息及發送控制指令的橋梁。輸入接口與檢測裝置連接,把檢測機構發送的檢測信號轉換為數字信號。輸出接口與執行機構相連,將控制器輸出的控制指令轉換為驅動執行機構工作的模擬信號。本系統采用FX0N-3A模塊,該模塊包括了A/D及D/A轉換功能。
(3)執行機構。是控制器向被控對象施加控制作用的裝置。本系統采用英威騰超小型變頻器。
(4)檢測裝置。采用Harch公司1720型低量程在線檢測濁度儀對水質進行實時檢測,其檢測精度完全滿足要求。
(5)計量泵。采用意大利愛米克(EMEC)CMS系列電磁計量泵。該泵可微電腦控制,具有藥桶液位偵測、報警輸出、加藥輸出自我檢測、沖程頻率及沖程長度雙調整等功能,可接收電壓、電流、脈沖等信號。
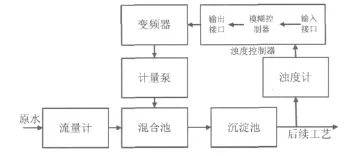
圖1 模糊PID控制系統結構圖
3 模糊控制器的設計
3.1 模糊控制器的組成及工作原理
模糊PID控制器結構圖如圖2所示。
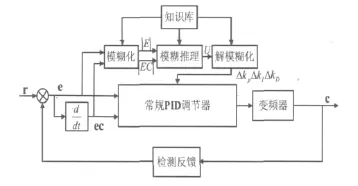
圖2 模糊PID控制器結構圖
PLC經中斷采樣得到濁度儀檢測輸入的信號,將該數值與給定值進行比較得到偏差e,并將e進行微分求得偏差變化率ec。將e和ec作為PLC控制器的輸入量,將這兩個數值進行模糊化處理得出E和EC并映射到相應的輸入論域上,得出模糊子集。根據模糊推理的合成規則做出模糊決策,得到模糊控制量U。為了對被控對象施加精確控制,再將U進行解模糊處理,得到確定的控制變化輸出量去控制變頻器[2]。
模糊PID控制器的輸出可以表示為:

式中:kj分別表示 kp、kI和 kD。kjt為參數 kP、kI和kD在不同狀態下的加權值。
參數調整規則如下:
(1)當|e|較大時,為加快系統響應速度,應取較大的kP和較小的kd,同時為了防止積分飽和,應取ki=0;
(2)當|e|和|ec|中等大時,為避免系統產生過大的超調量,應讓kP的值較小,而kd和ki大小應適當,以使系統保持較好的響應速度;
(3)當|e|較小時,應當使kd大小適當,若|ec|較小,kd應當適量大些,若|ec|較大,kd應當適量小些,以保證系統具有良好的穩態性能[3]。
根據以上參數調整規則,可制定出模糊控制參數的模糊控制規則。
3.2 模糊控制器設計原理
誤差E和誤差變化率EC的模糊子集為:{PB,PM,PS,ZO,NS,NM,NB},對應的論域為{3,2,1,0,-1,-2,-3}。
模糊控制器的輸出ΔkP、ΔkP和ΔkD的模糊子集為{PB,PM,PS,ZO,NS,NM,NB},對應的論域分別為{0.3,0.2,0.1,0,-0.1,-0.2,-0.3}、{0.06,0.04,0.02,0,-0.02,-0.04,-0.06}、{3,2,1,0,-1,-2,-3}。
根據查表法進行模糊推理運算,根據模糊規則求出控制量從而制定模糊控制表。模糊推理語句形式可以表示為:If E=Aiand EC=Bithen Δkj=Ci。其中Ai、Bi、Ci分別為 E、EC和模糊控制器輸出量Δkj(j=P,I,D)的模糊子集。如表示 ΔkP的一條模糊規則為:if E=NB and EC=NB then ΔkP=PB。
在計算出每一條模糊條件語句的模糊關系Ri(i=1,2,…,m,其中 m 為語句數)之后,根據語句之間存在的或關系,即可計算出總模糊關系,即

根據推理合成規則求出其輸出語言變量論語上的模糊集合U,即U=(E×EC)·R,將每一條模糊語句求出的U求并集,可得模糊子集
U=∨mi=1(E×EC)·Ri
對模糊控制輸出U進行反模糊加權平均法求得輸出變量Δkj的精確值,得表1、表2、表3所示的模糊規則表。
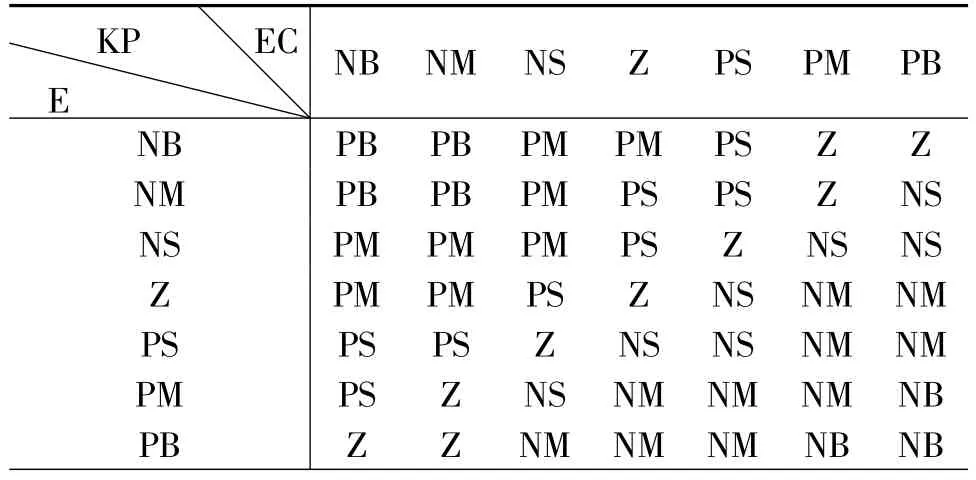
表1 ΔkP整定的模糊規則表
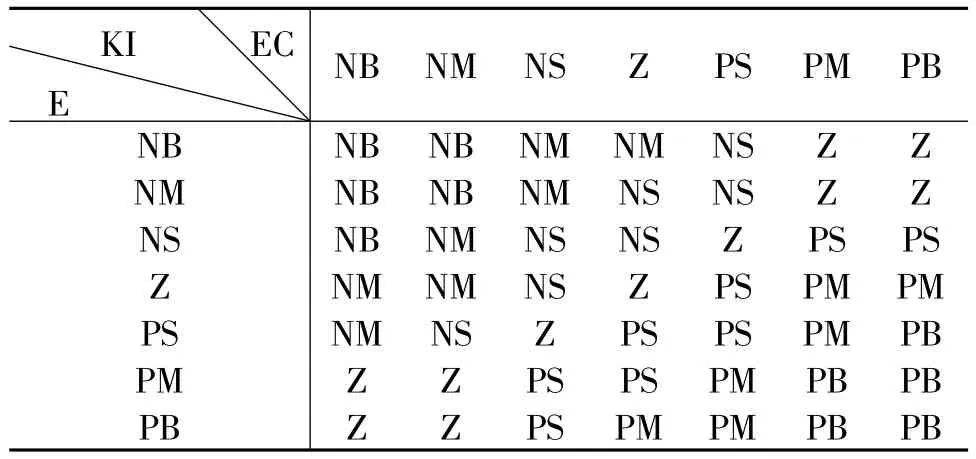
表2 ΔkI整定的模糊規則表
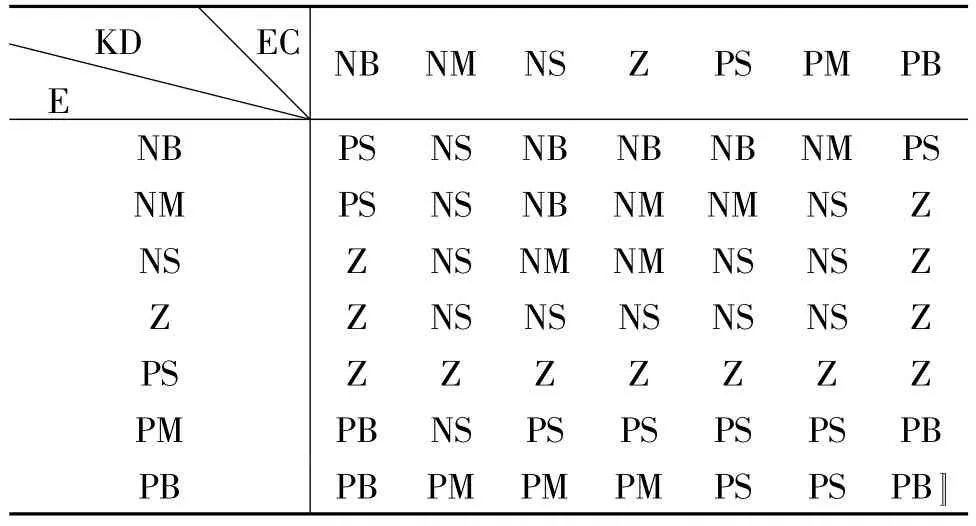
表3 ΔkD整定的模糊規則表
4 系統仿真
模糊控制器參數 e和 ec的隸屬函數分別如圖3-圖4所示。用Simulink建模如圖5所示。仿真結果如圖6所示。
由圖6可以看出,加藥泵采用模糊自整定PID控制相對于傳統PID控制策略控制效果更好,系統穩態性能得到了較大的改善,ts從15s降到6s左右,φ%從26.5%降為0。
5 結束語
仿真結果表明,模糊自適應PID控制將模糊控制與PID控制相結合,相對于傳統的PID控制具有更強的魯棒性,響應快速,無靜差,即具備了傳統PID控制器具有較高控制精度的特點,又具備了模糊PID適應性強、控制靈活的特點[4],尤其適應于污水處理這種時變、大滯后、非線性、難以建立精確數學模型的系統,在實際使用中易于實現。
項目根據污水處理系統中多變量輸入輸出的特點,根據地膜清洗污水實際情況,采用以PLC為控制器的模糊控制策略,提高了控制系統的精確性和穩定性,減少了藥耗,提高了污水處理質量,明顯降低了每日新水補充用量,在節約水資源方面起到了積極效果,既符合現代化工廠高效生產的要求,又符合節能減排的環保理念,為污水處理廠實現全面自動化控制提供了較好的控制方案,具有較好的市場前景。
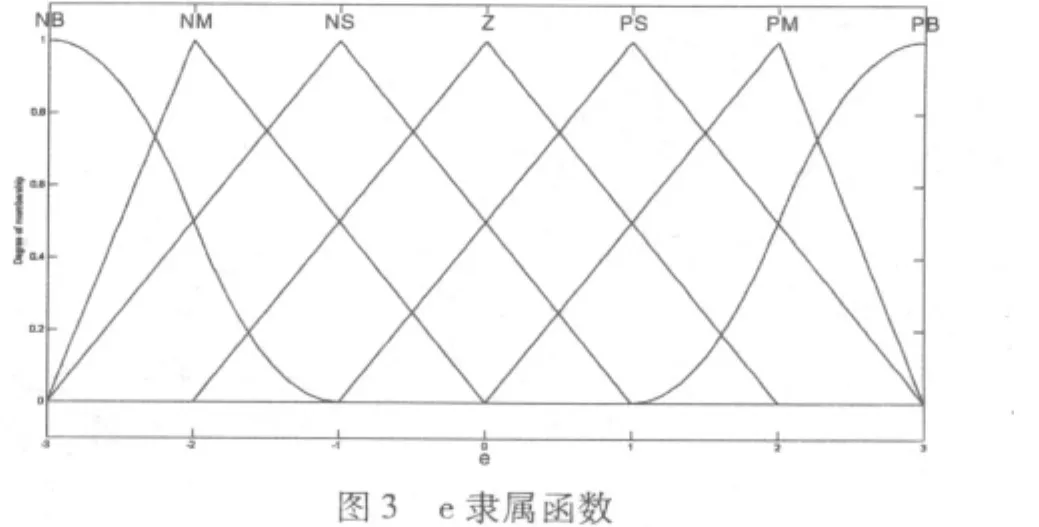
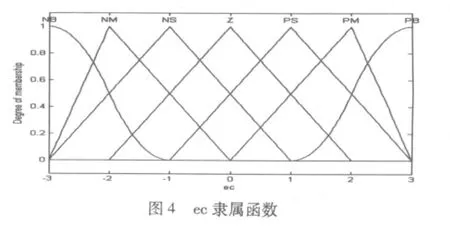
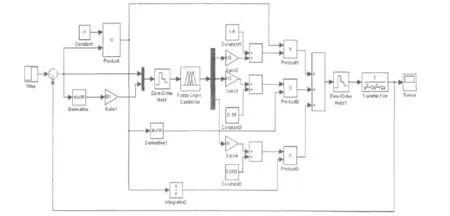
圖5 系統Simulink仿真建模圖

圖6 常規和模糊自整定PID控制響應曲線
[1] 徐立軍,段友蓮,等.基于PLC的回收地膜清洗污水處理自動控制系統[J].環境工程,2010,28(3):60-62.
[2] 曾光奇.模糊控制理論與工程應用[M].武漢:華中科技大學出版社,2006.
[3] 楊云飛.基于PLC的自適應模糊-PID壓力控制系統[J].微計算機信息,2007,23(9-1):89-90.
[4] 王健,張興申.污水處理系統溶解氧的模糊自適應PID控制[J].自動化與儀器儀表,2010(1):39-41.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45