基于CCD的自動循跡小車的軟件設計
2012-07-26 04:57:02石冰飛周宏輝
自動化儀表 2012年1期
楊 寧 石冰飛 朱 平 周宏輝
(上海電力學院電力與自動化工程學院1,上海 200090;國核自儀系統工程有限公司2,上海 200233;寧波市電業局3,浙江 寧波 315010)
0 引言
自動循跡小車作為一種移動機器人,主要應用于機場、倉庫以及其他需要搬運設備的工況中。小車的基本結構由導向模塊、驅動模塊、微處理器、控制模塊、通信模塊、機械部分和電源模塊構成。小車通過導向傳感器獲取路徑信息,并按一定的精度要求沿正確路徑行駛。目前,比較常用的傳感器有激光傳感器[1-2]、CCD 傳感器和測距儀等[3-4]。
基于CCD的自動循跡小車采用CCD獲取道路信息,通過圖像處理辨別路面標志,并確定小車前方一定范圍內的路況。綜合分析道路和速度等相關信息,采用相應的控制策略來控制小車沿正確的路線前進。本文主要介紹所設計的基于CCD的自動循跡小車的軟件系統,提出軟件設計方面的關鍵問題,并探討了圖像信息的采集、處理和舵機控制策略[5-6]。
1 軟件系統整體設計
本設計中,要求自動循跡小車在一定寬度的白色底黑色引導線的道路上自動行駛,并可根據變化的道路形狀,按行駛要求自主導航。這就要求小車具備較強的自適應能力。自動循跡小車需要穩定快速行駛,兼顧速度和可靠性的要求,因此,設計方案必須考慮傳感器信號采集處理、舵機和電機控制策略設計等因素[7]。整個軟件系統包括圖像信息采集和處理、舵機轉角控制、電機速度控制和速度反饋。軟件系統組成如圖1所示。
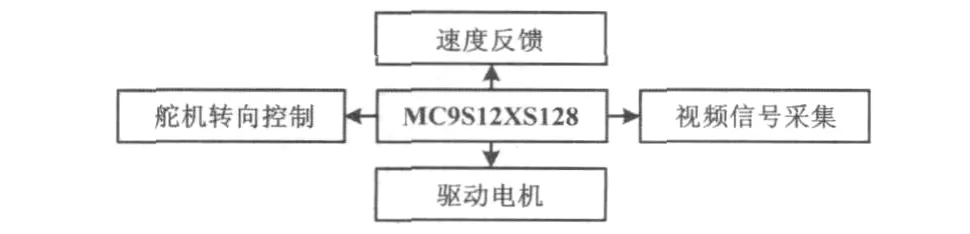
圖1 軟件系統組成圖Fig.1 The composition of software system
2 軟件模塊設計
2.1 圖像信息處理
對道路形狀的判斷正確與否決定了小車能否實現自動循跡功能。雖然圖像處理算法已經有很多成熟的算法和應用,但如何有效地采用符合具體實際使用的算法則需要經過實際測試才能確認。圖像處理包括對CCD信息采集、道路狀況的提取、路徑的計算等。一般的設計流程包括圖像信息采集、圖像信息的處理、道路信息的計算和行駛路線的優化這4個部分。
圖像信息采集時,單片機的端口與攝像頭的圖像灰度信息輸出引腳相連。考慮到單片機的內存有限,在每張圖像中進行隔行采集,對每行數據進行不間斷保存,共采集到53行×74列的有效像素數據。剔除有誤差的點,并考慮有效使用內存,只保存第2行到第41行,以及中間50列的像素數據,即實際圖像為40行×50列的數據。
2.1.1 濾波算法
圖像處理的濾波算法較多,主要分為時域濾波和頻域濾波[8-9]。時域濾波常用的方法有平均值濾波、中值濾波、限值濾波等,頻域濾波有傅里葉變換、小波變換等。考慮到頻域濾波的運算量大,需要占用大量內存,本文采用時域濾波法。去噪濾波采用中值濾波與滑動平均值濾波相結合的算法。中值濾波的優點是能有效克服因偶然因素引起的波動干擾,對溫度、液位等變化較緩慢的被測參數具有良好的濾波效果;滑動平均濾波的優點是對周期性干擾具有良好的抑制作用,平滑度高,適用于高頻振蕩的系統[10]。
在實際處理中,每次取一行中3個相鄰列的灰度值,先判斷這3個值是否有相同的灰度值,若灰度值相同則采用滑動平均值濾波,取平均值,并將第二個值修改為該平均值;若灰度值不同則采用中值濾波,并對這3個值進行排序,將第二個值修改為3個數值的中間值。該算法對一個像素點的過濾僅用到了相鄰兩個像素點的灰度值,計算量不大,占用內存不多,適合單片機的計算,且該算法相對來說較簡單,時間復雜度不高,滿足了小車對快速控制系統的要求。
濾波前后圖像對比如圖2所示。
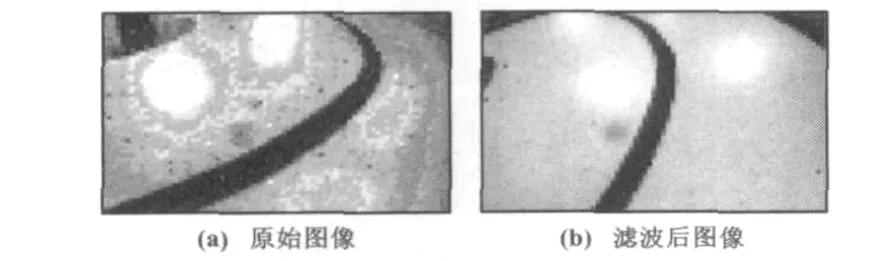
圖2 濾波前后圖像對比圖Fig.2 Image comparison pre-filtering and post-filtering
由圖2可以看出,經過濾波后的圖像更適合后續的判別和處理。
2.1.2 軌跡線提取
在濾波后的圖像中,白色為小車的行駛范圍,黑線為小車需要跟蹤的軌跡,因此,軌跡線的提取即為黑線,本文采用跟蹤引線的黑線提取算法。假設某時刻找到某行的黑線中心位置m,則下一時刻在下一行的m附近搜尋黑線的左右邊緣,然后計算該行的中心位置。該方法的特點是始終在前一行的引線中心位置附近尋找下一行的引線位置,故稱為“跟蹤”引線的黑線提取算法。該算法的優點是在首行引線檢測正確的前提下具有較強的抗干擾性,能更有效地消除十字垂直交叉黑色引線的干擾以及引線外黑色噪點的影響,始終跟蹤目標引導線。
在試驗過程中,發現該算法也存在一定的問題。由于是在連續鄰域上跟蹤引導線,因此,若第一行引線的檢測位置和實際導引線偏差較大,將產生一連串的錯誤,甚至造成小車失穩。為防止這種現象的發生,可利用前面兩行的引線中心位置來確定下一行的黑線位置。因為前兩行同時出錯的概率遠遠小于一行出錯的概率,所以采用這種方法造成丟失引線的幾率會大大減小。
此外,針對每行中的孤立噪點,采用計數法排除。如果連續黑點數小于某個閾值時,認為是噪聲影響,而非實際的黑線,從而可以減少誤判概率。
2.1.3 梯形失真
由于攝像頭與地面之間存在俯角,導致采集到的圖像并不是一個方形區域,而是一個近處區域小、遠處區域大的梯形區域,圖像出現失真。梯形失真示意圖如圖3所示。
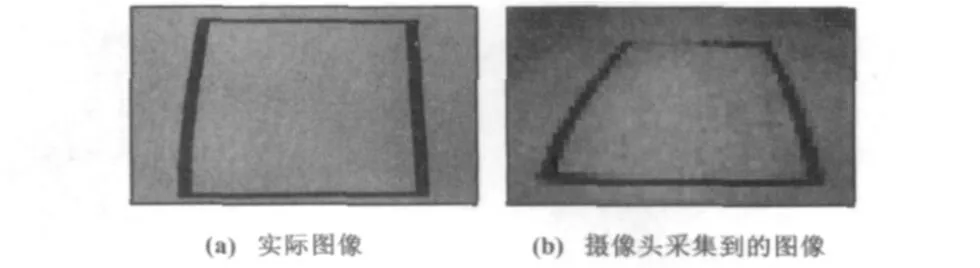
圖3 梯形失真示意圖Fig.3 Keystone distortion
由圖3可以看出,攝像頭采集的圖像發生了很大的形變。即使遠處引線偏離道路中間很大,但是在圖像上顯示出來的仍有一個較小的偏差,從而使傳感器出現誤差,前瞻性大大減小,小車容易因控制不及時而沖出行駛范圍。
在實際處理中,需要對圖像進行失真補償:當小車靜止時,進行掃描區域的標定,測量出圖像區域的實際位置,并與采集到圖像中的位置進行換算,即可得到以下變換公式。

式中:y為在實際中圖像位置的列數;x為攝像頭采集到的圖像的列數;k為梯形一條邊的斜率。
在變換公式中,b的取值最為關鍵,由于每行之間的間隔不同,所以圖像變換公式中不能采取同樣的b值。最佳方法是對每行設定一個相應的b值,但對于行數較多的圖像,每行都進行精確測定顯然不可能實現。為了簡化程序,對于該40×50的圖像,將40行圖像按每10行分為一組(0行 ~9行、10行~19行、20行~29行、30行~39行),每組采用相同的b值,即每組的中間行測出來的b值。這樣既減少了測定每行b值的工作量,又比整個圖像采用一個b值計算得到的數據準確性高。
將圖像中每一行的最中間列作為基準列,這里取第24列為基準列,設定為0列。將左邊的列作為負列,右邊的列為正列。經過式(1)補償后得到的每一行新的各列,在第0列左邊的列,依次為第-1、-2、-3,…,第-n列,直到實際圖像最左邊的列為止;右邊依次為第1、2、3、…、n列,直到實際圖像最右邊的列為準。由此得出圖像中各像素點的實際位置。在進行梯形失真補償后,計算出每行黑線的中心位置,并保存在一維數組中。這個數據就是每行的實際引線所在位置。
得到每行引線的實際位置后,為減少誤差,再對每行的引線位置數據進行滑動平均濾波,取滑動采樣值個數為5,每次修改第3個采樣值為5個采樣值的平均值。經過濾波后,每行引線的中心位置變得更加平滑,這就避免了由于引線提取部分的計算誤差而引起的錯誤。
2.1.4 軌跡曲率處理
對于道路形狀的判斷,可以采用曲率法。找到每行黑線的中心位置后,再進行道路曲率信息的計算,即可得出道路的類型。簡單的曲率計算公式如下所示:

式中:x1、x2和 x3為3個實際距離相等的行的黑線位置。
行駛路徑類型可以分為直道、曲率小的S彎、曲率大的S彎和普通彎道4類。U型彎道和O型彎道可以認為是多個同方向普通彎道連接在一起,因此,都可以被認為是普通彎道。若計算出來的曲率q接近0,則說明該段道路為直道或者小S彎;若曲率q比較大,則說明該段道路為普通彎道;若計算出來的曲率q非常大,則說明該段彎道為大S彎。
在計算得到各段道路的具體類型之后,就可以進行小車行駛路徑的優化。通常情況下,直道和小S彎道按照直線行駛通過;對于普通彎道,一般將小車行駛路線的曲率比道路彎曲程度大一點,盡量以微內圈的線路通過;對于大S彎道,需要將小車的行駛路線曲率比道路彎曲程度小一點,在不跑出道路的情況下盡量少走彎路,這樣小車看到的彎道類型始終是大S彎道,即可以連續地走“小彎”路線通過,這樣既節約時間,且行駛速度不會因為拐彎太大而過于減小,并保持勻速行駛。
優化前后路徑如圖4所示,虛線代表實際道路形狀,帶箭頭的實線代表優化后的路徑形狀。
2.2 舵機轉角控制
在循跡小車的行駛過程中,舵機轉向控制是小車能夠穩定行駛的一個重要因素,它對小車的速度有很大影響。若轉向及時,小車就不需要在彎道處通過降低速度來通過彎道,從而保證小車始終保持勻速行駛。
小車的轉向是根據信號線輸入的占空比信號來控制固定在小車前輪的中央位置的舵機,以產生一個轉角;再通過左右轉向搖臂產生一個扭矩,驅動前輪轉向。根據測出的最左、最右和中間位置的信號占空比的值,采用等分法來確定占空比和轉角的比例。
舵機轉角一般采用PID控制[11]。最簡單的是采用P控制,通過設定合適的系數,就可以減小余差和超調,使小車始終保持在道路中間位置且不跑出道路。但由于舵機本身是一個大慣性大延遲系統,若只采用P控制,一旦控制不及時,就會產生較大的超調,很有可能沖出道路,或被迫采用犧牲速度的方法來換取穩定性。為改進控制效果,增加了D控制,這樣就可以在出現偏差時作出較快反應,減少控制延時。經測試,加入D控制后,在過普通彎道時效果較好,可以使小車入彎時轉向提前,切內道過彎,出彎時轉向減少,但是在S彎道,尤其是大S彎道時,轉過一兩個彎后,就會引起小車與引線偏差增大,很容易跑出道路,引起系統的不穩定。D控制系數越大,大S彎道的穩定性越差。I控制作用可以消除余差,但是I控制是一個緩慢的控制,而小車的速度很快,在進入彎道時,前半彎控制作用不大,且對于連續的彎道,I控制變得較強,進入直道后很容易引起較大的超調,使小車沖出道路。在實際測試中,加入I控制后的效果并不好,在大S彎道處也沒有明顯的效果,而且會引起彎道進入直道時車體發生抖動,整體效果反而變差。所以,舍棄I控制,只采用PD控制。
由于面陣CCD可以獲得更多的信息量,因此,可采用圖像處理得到的曲率軌跡來進行輔助的控制。將道路曲率看作干擾,相當于在閉環的PD控制上增加一個曲率的前饋。這樣就可以充分利用攝像頭傳感器的高前瞻性,預判前面道路的趨勢。該控制效果明顯優于簡單PD控制的控制效果。
小車舵機控制模型如圖5所示。

圖5 小車舵機控制模型Fig.5 Control model of the steering engine of car
3 循跡試驗
考慮到實際應用環境下對小車的平穩運行的要求,試驗中對小車采用勻速運行。道路信息為二維水平平面,寬度最大為600 mm,窄道區域最大為450 mm。道路彎曲處最小曲率半徑不小于500 mm,并且路徑有交叉,交叉角為90°。試驗中,小車采用不同速度勻速運行,并以偏離黑線的最大誤差和沖出道路的次數為標準衡量系統性能,小車試驗數據如表1所示。表1中:V為小車速度;ΔS為最大誤差,ΔS=|S實際-S標準|;N為沖出軌跡次數。
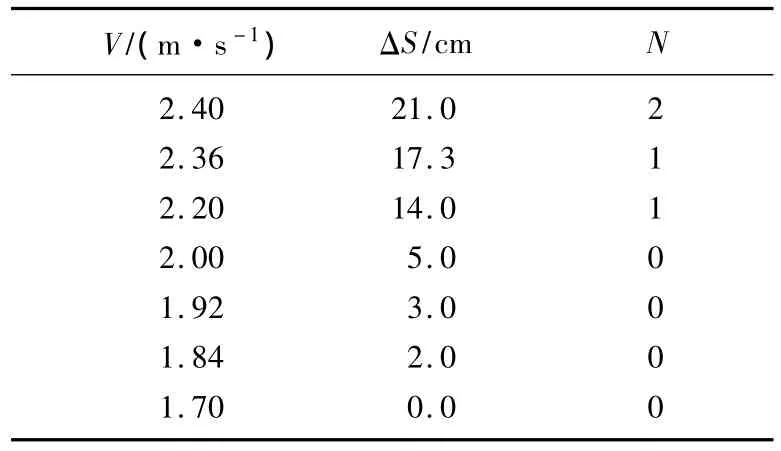
表1 小車試驗數據Tab.1 The experimental data of car
由表1可以看出,當速度逐漸增大時,小車偏離軌跡中心線的距離也隨之增加,沖出整個軌跡的次數也明顯增加。當速度不是很快時,小車能夠很好地跟蹤黑線。
4 結束語
近年來,自動循跡小車在不同場合的應用需求日益增加,以激光、CCD和電磁等作為道路信息采集方式的不同循跡方式不斷出現。
本設計采用CCD攝像頭獲取道路信息,根據路面標志作為導引信息,通過圖像處理來確定自動循跡小車的前方路況。本文介紹了一套較為適合基于CCD的自動循跡小車的信息處理和控制方法,并針對各模塊處理方法和運動控制策略進行了分析和比較,包括CCD信息采集、道路狀況的提取和路徑形狀判斷等內容。控制策略上主要采用變參數、帶死區的增量式數字PID控制器,使小車行駛更加穩定。在試驗測試中,循跡小車以不同的車速在固定跑道上行駛,采用偏離中心的最大誤差和沖出道路次數來衡量循跡小車性能。試驗表明,本文所設計的小車能有效地識別和跟蹤多種類型的道路[12]。
[1]Lü Yingjun,Xu Anling,Chong Cancan,et al.Application analysis of the linear CCD in the path recognition system1[C]∥International Conference on Integration Technology,Shenzhen,2007:151-154.
[2]宮紀波.基于紅外反射循跡小車的傳感器布局研究[J].工業控制計算機,2009,22(8):97-98.
[3]程志江,李劍波.基于遺傳算法的智能小車模糊控制系統的研發[J].自動化儀表,2009,30(8):4-7.
[4]王子輝,葉云岳.基于CMOS傳感器的智能循跡小車圖像識別技術研究[J].傳感技術學報,2009,22(4):484-488.
[5]卓晴,黃開勝,邵貝貝,等.學做智能車:挑戰“飛思卡爾”杯[M].北京:北京航空航天大學出版社,2007:45-68.
[6]田里,姚素英,周津.CMOS圖像傳感器的自適應降噪方法研究[J].傳感技術學報,2008,21(9):697-701.
[7]楊枝靈,王開.數字圖像獲取、處理及其實踐應用[M].北京:人民郵電出版社,2003:70-100.
[8]郎銳.數字圖像處理學[M].北京:北京希望電子出版社,2003.
[9]甄紅濤,齊曉慧.智能車參數自校正方向模糊控制器的設計[J].自動化儀表,2010,31(9):57-59.
[10]溫陽東,王祥好.基于線陣CCD的智能小車路徑識別系統[J].合肥工業大學學報:自然科學版,2009,32(9):1348-1353.
[11]黃偉,吳青,馬育林,等.基于視覺導航的智能小車調速控制器設計[J].武漢理工大學學報:自然科學版,2010,32(6):103-106,135.
[12]梁佳海,黃雪燕.基于光引導的小車自動尋軌技術研究[J].欽州學院學報,2008,23(3):38-40.
