多軸級聯控制方法及其在RFID封裝設備中的應用
2012-07-26 11:04:08尹周平權建洲
自動化儀表 2012年2期
張 銳 尹周平 權建洲
(華中科技大學機械科學與工程學院1,湖北 武漢 430074;空軍雷達學院軍械制配教研室2,湖北 武漢 430019)
0 引言
射頻識別(radio frequency identification,RFID)電子標簽作為物聯網的核心技術,被認為是21世紀最有發展前途的信息技術之一。在RFID標簽封裝設備中,主要包括點膠、貼片、熱壓、檢測和基板輸送五大模塊。其中,基板輸送自始至終貫穿整個設備的加工工作,與其他四個模塊的工作緊密聯系。傳輸過程中,張力和運動精度直接影響到產品的質量。然而,在基板傳輸過程中,基材的張力波動受系統很多不穩定因素的影響,如多輥軸的軸線平行度、輥軸的不圓度等[1]。因此,為提高產品的質量、保證運動的效率,要求控制系統既能進行運動控制,又能進行張力控制[2]。
Norbert A.Ebler等對張力控制器加張力傳感器和位置控制器加張力調整輥兩種張力控制方法進行了分析和比較[3]。Priyadarshee等研究了在高速度低張力情況下的卷到卷傳輸過程[4]。F.L.Luo采用一種人工神經網絡算法,成功隔離了控制回路之間交叉耦合的速度和張力,使兩個回路可以獨立控制[5]。任劍等對張力控制方法進行了分析,提出了一種按張力偏差調節的張力閉環控制方案[6]。王春梅采用張力控制器加磁粉制動器的方式對放卷過程中的張力進行控制[7]。
上述張力控制法對控制系統的要求復雜,且很難同時很好地進行運動控制和張力控制。此外,實際應用中維護和管理復雜,設備調試繁瑣且成本相對較高,影響了其在工程中的應用和推廣。
1 RFID標簽封裝基板輸送要求
RFID電子標簽封裝設備主要由點膠、貼裝、熱壓、檢測及基板輸送這五大模塊組成,采用卷對卷的生產方式。RFID封裝設備的工作示意圖如圖1所示。
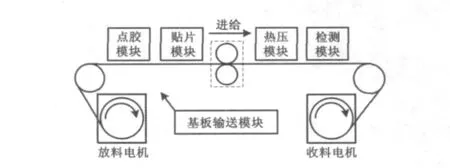
圖1 RFID封裝設備工作示意圖Fig.1 Operation of the RFID packaging equipment
圖1中,點膠模塊通過對基板天線點滴特定的導電膠,為芯片與線圈互連提供粘接劑。貼片模塊完成對芯片的倒貼裝任務。熱壓模塊通過熱壓頭對芯片與天線的連接部位進行加熱和加壓,使膠水固化,完成芯片與天線的電氣互聯。檢測模塊實現對封裝好的標簽進行在線檢測。基板輸送模塊將標簽輸送到點膠、貼片、熱壓和檢測模塊指定的區域,完成輸送功能,基板輸送模塊由放料、基板進給和收料組成。
由上述分析可知,在封裝過程中,點膠的膠滴、貼片模塊的貼裝和熱壓固化都是圍繞基板進行的。因此,基板輸送的精度控制對封裝標簽是否合格至關重要。
在基板輸送過程中,有兩個主要因素會影響基板輸送精度:基板進給的位置控制精度和基板中張力變化引起的基板變形。根據RFID裝備對基板輸送的要求,基板輸送的精度要求控制在±0.5 mm內。這就要求控制系統能同時進行精確的運動控制和恒張力控制,使基板進給的精度滿足設備的需求。
2 多軸級聯張力控制方法
多軸級聯張力控制方法基于獨立式可編程多軸控制器(PARKER ACR9000)的多軸控制功能,通過張力傳感器檢測反饋張力信息,采用力和位置的多軸級聯控制對卷繞放料軸進行控制。該方法既能同時進行精確的張力控制和位置控制,又降低了生產成本,減少了控制的復雜性,具有較高的應用價值。
2.1 多軸級聯張力控制原理
根據基板輸送過程中對張力和運動的要求,多軸級聯張力控制原理如圖2所示。多軸級聯控制將位置控制軸與張力控制軸串聯起來。
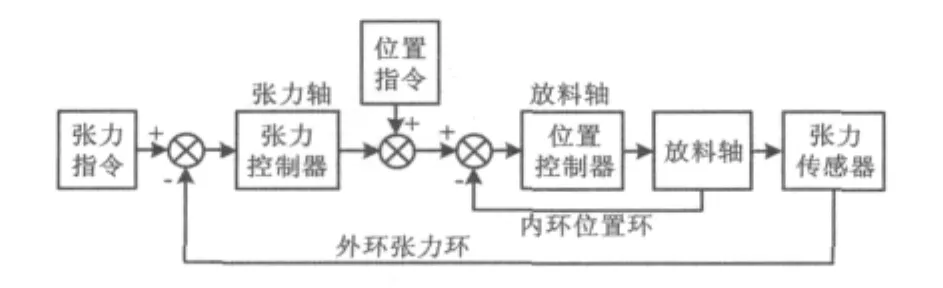
圖2 多軸級聯的張力控制原理Fig.2 Principle of multi-axle cascade tension control
圖2中,內環是位置控制軸,編碼器的信號反饋至位置環,通過位置閉環控制對放料軸進行位置控制;外環是張力控制軸,可以通過A/D輸入口接收張力傳感器的模擬信號,用作張力反饋。這樣,張力指令通過與張力反饋信號作比較,經過控制器調節后,將指令輸出用于修正位置控制軸實際接收的位置指令值。通過對位置控制軸實際位置的調整變化,最終可以實現張力的控制。
2.2 多軸級聯實現方法
控制器選用PARKER公司的ACR9000P3U8M1。該控制器作為一款多軸獨立式運動控制器,穩定可靠、調試方便;同時,提供了豐富的接口,可以實現8軸聯動、插補功能。控制器自帶8路16位高精度A/D,可實現對傳感器反饋的信號的處理,并通過伺服軸通道輸出指令對電機進行位置控制。區別于常用運動控制卡,PARKER運動控制器最突出的特點在于其電子齒輪功能具有開放性,用戶可以設置相關參數實時采集信號資源,用于修正位置指令。實現多軸級聯張力控制的關鍵在于充分利用PARKER控制器電子齒輪的開放性特點,建立虛擬張力軸,實時采集張力軸的輸出并作為位置修正指令,通過動態改變內環的位置指令,驅動卷繞電機帶動料軸轉動,最終實現基材中位置軸和張力軸的級聯控制。
本文采用PARKER控制器作為核心控制器件,交流伺服電機作為執行部件。電機編碼器信號作為位置環反饋至控制器。張力信號經過濾波放大后反饋至控制器模擬量輸入口,作為放料電機的外環張力環。控制器通過位置環和張力環雙閉環控制電機的運動,達到同時進行位置控制和張力控制的目的。
多軸級聯控制方法實現如圖3所示。
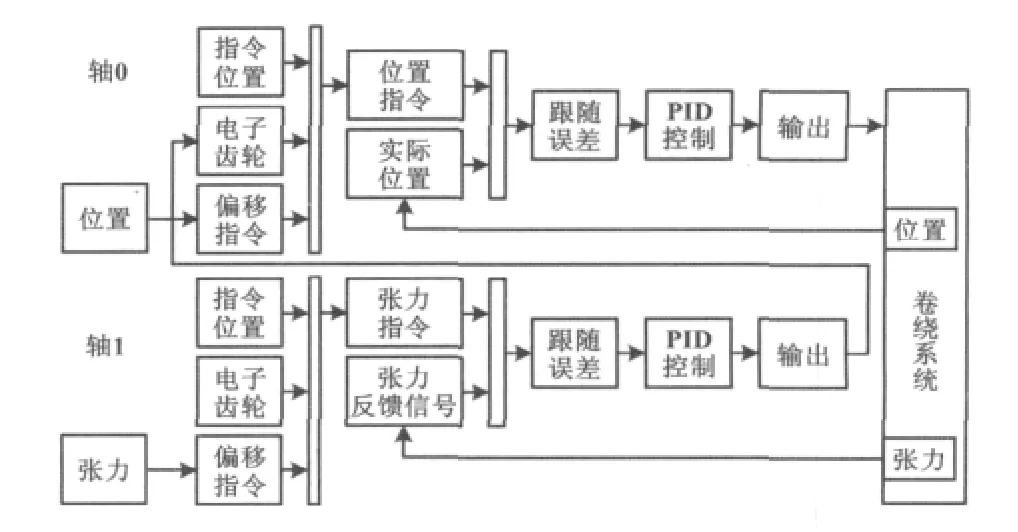
圖3 多軸級聯控制方法實現Fig.3 Implementation of multi-axle cascade control method
圖3中,軸0為放料軸,軸1為新增虛擬軸。上位裝置分別給軸0發送位置指令、給軸1發送張力指令。軸1通過比較張力指令和張力反饋信號,將比較值通過軸1的PID控制器輸出給軸0的軌跡規劃器,修改軸0的位置指令。軸0通過比較更改后的位置指令和實際位置,將比較值通過軸0的PID控制器輸出給伺服放大器,以控制電機運動。這種控制方法可以實現以張力控制為主要控制環路、位置控制為輔助控制環路的級聯控制。
通過對控制器進行相關設置,改變電子齒輪比、速度參數和一些比例參數,可以實現效果良好的級聯控制。如實現多軸級聯和張力信號采集,可以采用以下指令。


3 試驗結果及分析
為驗證張力的控制效果,搭建了如圖4所示的基于PARKER多軸控制器的基板輸送實驗平臺進行試驗。
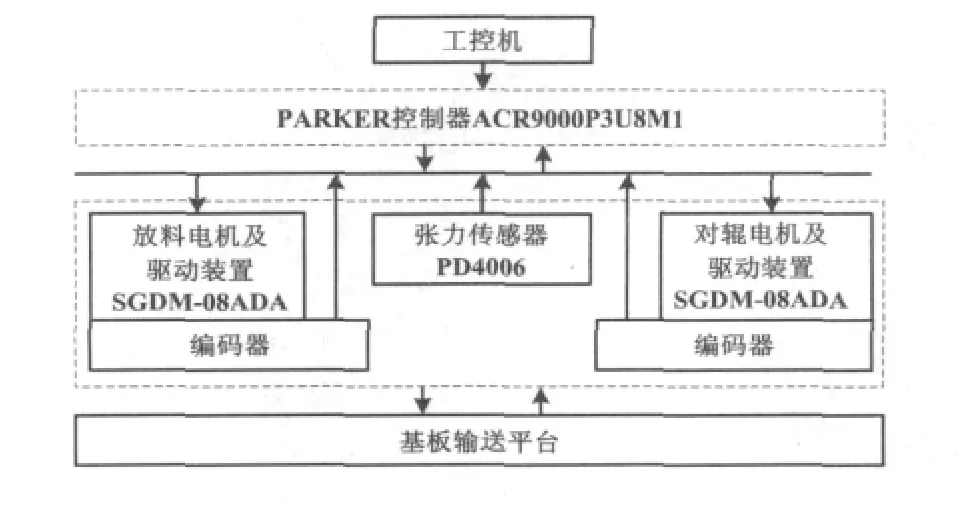
圖4 硬件結構構成示意圖Fig.4 Schematics of hardware structure
由圖4可以看出,系統采用兩套安川伺服電機SGMAH-08AAA41及驅動裝置SGDM-08ADA搭建基板輸送平臺;采用E+L的張力傳感器PD4006,實時采集基板輸送中的張力信息;采用 PARKER公司的ACR9000P3U8M1作為核心運動控制器,負責傳感器信息的處理和伺服電機的運動控制。
試驗結果如圖5和圖6所示。其中,圖5表示基板進給的位置精度,圖6表示張力試驗曲線。
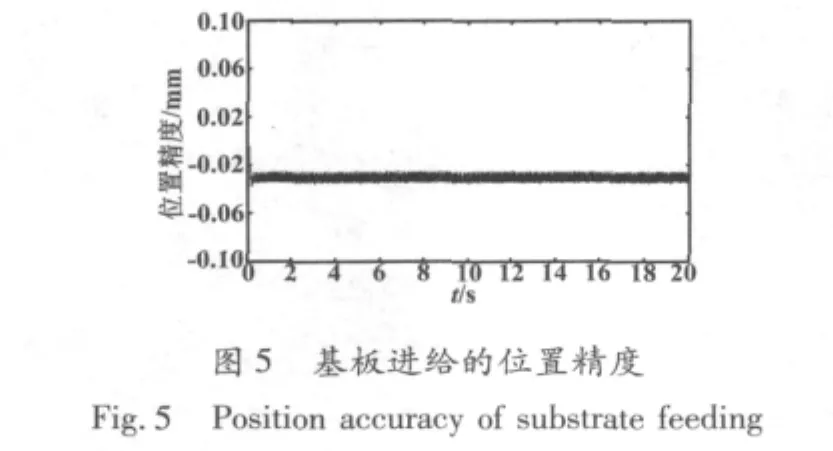
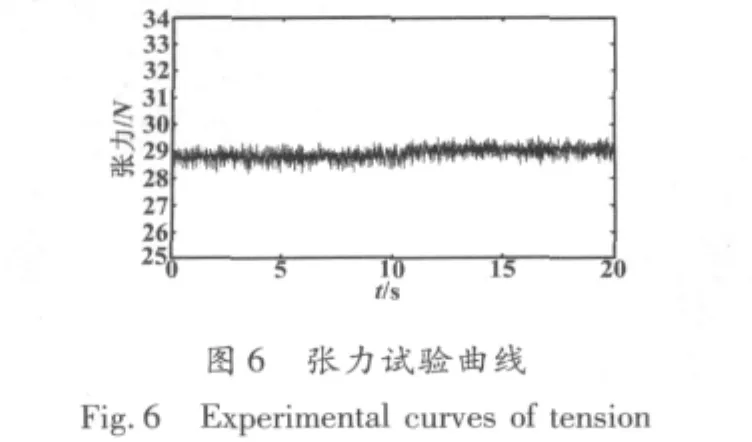
試驗中采用的柔性基材為 PET薄膜,厚度為50 μm,寬度為 400 mm,彈性模量為 4000 MPa,基板進給速度為0.12 m/s。設定參考張力值為28.8 N,張力采樣間隔時間為0.5 ms。
從圖5和圖6可以看出,基板進給的位置精度為±0.05 mm;基板輸送過程中張力控制精度為±1 N,由公式e=計算可得張力變化引起的基板形變波動為±0.06 mm。因此,綜合基板進給的位置精度和基板形變,基板輸送的精度可以控制在±0.11 mm(±0.5 mm以內),滿足設備對基板輸送精度的需求。
4 結束語
在RFID設備基板輸送過程中,張力的控制至關重要,其直接關系到產品加工的質量。傳統方案通常是采用獨立的張力控制器進行張力控制,并采用運動控制器進行位置控制,這往往導致生產成本高、上位機無法監控張力信息、調試和維護管理復雜。本文根據RFID封裝設備的工況需求和實際加工過程中對張力和位置的控制要求,提出了一種基于PARKER控制器的多軸級聯張力控制方法。該方法既能同時對電機進行精確的張力控制和位置控制,又降低了生產成本、減少了控制的復雜性,具有較高的應用價值。
[1]Shin K H,Jang J I,Kang H K,et al.Compensation method for tension disturbance due to an unknown roll shape in a web transport system[J].IEEE Transactions on Industry Applications,2003,39(5):1422-1428.
[2]Chen Jiankui,Yin Zhouping,Xiong Youlun,et al.A hybrid control method of tension and position for a discontinuous web transport system[C]∥ InternationalConferenceon Information and Automation,Zhuhai,Macau,2009:265 -270.
[3]Ebler N A,Arnason R,Michaelis G,et al.Tension control:dancer rolls or load cells[J].IEEE Transactions on Industry Applications,1993,29(4):727 -739.
[4]Mathur P D,Messner W C.Controller development for a prototype high-speed low-tension tape transport[J].IEEE Transactions on Control Systems Technology,1998,6(4):534 -542.
[5]Luo F L.Multiple-page-mapping backpropagation neural network for constant tension control[J].IEE Proceedings Electrical Power Application,1998,145(3):239 -245.
[6]任劍,靳建鼎.薄膜卷制過程中張力控制系統的應用[J].電子工藝技術,2010,31(3):172 -176.
[7]王春梅.張力控制系統在復卷機上的應用[J].中國有色建設,2006(4):29-30.
[8]陳建魁.面向RFID封裝的柔性基板輸送裝置的研究與實現[D].武漢:華中科技大學,2006:16 -18.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年11期)2018-08-04 03:26:08
電信科學(2016年10期)2016-11-23 05:11:56
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57
