基于轉向架計量的動態電子軌道衡數據波形分析
2012-07-27 11:23:32徐棟
鐵道運營技術 2012年3期
關鍵詞:轉向架
徐 棟
(廣西工學院 電子信息與控制工程系,碩士研究生,廣西 柳州 545006)
動態軌道衡是一種對行進中的貨車進行動態稱量的計量設備。它通過重力傳感器感應通過秤臺的貨車重量并轉化成對應的電信號,再經由A/D轉換變成數字信號[1]。這種信號包含了大量關于貨車的信息,如過衡速度、距離、車型、軸重、輪重等,通過分析這些數據就可以得到有關車輛行駛方向、速度、車輛重量、偏載等信息,可見準確分析波形數據對準確稱量具有十分重要的意義。由于軌道衡的波形數據不僅與軌道衡的結構形式、臺面參數有關,還與車輛本身的軸距、重量、過衡速度、輪對是否有擦傷等因素有關,并與現場的各種電磁干擾因素有關。因此,實際的波形數據形狀很復雜,給準確識別帶來較大困難。轉向架計量方式具有測區長,精度高、外圍有基礎受震動性小等特點,通過識別波形,計算出前后轉向架的重量后即可得出整車重量,達到計量的目的。本文主要針對轉向架計量方式,對動態電子軌道衡的數據波形特點及識別分析進行說明。
1 轉向架計量波形數據的特點
1.1 車輛過衡波形介紹 我國現行的動態電子軌道衡從受力方式分有斷軌軌道衡、不斷軌軌道衡;從臺面組合形式上分有單臺面、雙臺面、多臺面形式;從計量方式上分有軸計量,轉向架計量和整車計量。受力方式、臺面組合形式及計量方式的不同都會導致過衡軌道衡波形不同[2]。
由于我國現階段使用的國產貨車的型號、規格不盡相同,轉向架軸距長度也不一樣。我國現行的轉向架軸距,根據生產廠家制造規格不同有1 575 mm,1 600 mm,1 700 mm,1 720 mm,1 750 mm 不等[3]。這些車輛在不同車速下過衡時,便產生各種過衡波形,形成軌道衡波形的多樣性。
傳感器信號經放大、濾波、A/D轉換,形成數字信號后送入計算機,得到波形數據。理想狀態下,轉向架計量方式列車過衡波形,如圖1所示。
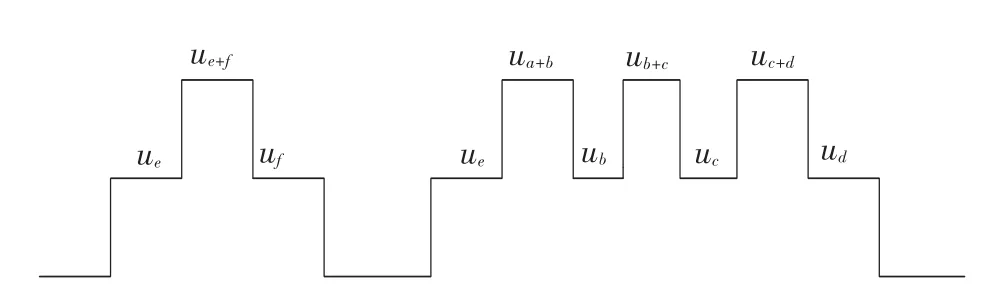
圖1 轉向架計量方式下的理想過衡波形
圖1中左半部分表示列車前轉向架過衡,ue段波形代表轉向架第1根軸上衡,uf段代表第1根軸下衡,ue+f代表2根軸都在衡上。同理,后半部分代表后轉向架過衡波形,及后1輛車與前車過渡過衡的過程。ub+c代表前車后轉向架第2根軸與后車前轉向架第1根軸同在衡上的過程。uc段代表前車已完全過衡,只有后車前架第1根軸在衡上的過程。
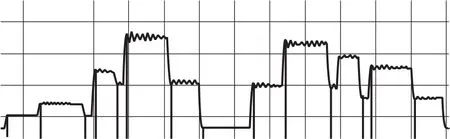
1.2 實際過衡波形特點及原因 實際列車過衡波形并非如圖1所示,而是有一定斜度,波形也并非平坦。實際過衡波形如圖2所示。
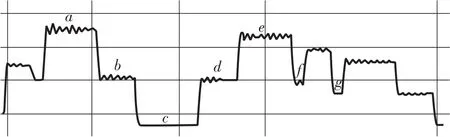
圖2 軌道衡實際過衡波形(轉向架計量方式)
通過對軌道衡波形數據進行分析,其特點主要包括5個方面。
1.2.1 波形包含軸重信息 由于車輛重量跟質量的一一對應關系,車輛車軸重量顯示在波形中即為一段段波形的變化。如圖中b,d,f段波形各代表車輛軸重信息。車輛載重通過相應數學運算即可求得,即通過對a,e段波形作求和等處理后,可得車輛載重。
1.2.2 幅值差距大 由于車輛重量相差很大,最重的可以超過100 t,最輕的則不到20 t,故分配到每根軸上的重量就大不一樣。因此,體現在波形上的幅值相差就很大,如圖中f,g段波形。
1.2.3 時間軸相差大 過衡時車輛速度相差很大,最低5 km/h,最高80 km/h。因此,同一列車過衡后,波形在時間軸上相差很大,波形上表示為某段波形的持續長度,如c段波形。對于同一列車,由于c段波形對應的車輛長度一定,所以不同速度下,列車通過的時間就不同,對應到波形c的長度便大不相同。
1.2.4 干擾復雜 由于車輛運動產生的橫向擺動及垂向振動,乃至車輪表面擦傷引起的沖擊振動,均會使波形數據受到干擾,產生虛假輪重信號,造成識別錯誤。如圖中各段波形的振動變化。
1.2.5 電磁干擾大 由于傳感器信號調理電路的放大倍數很大,不可避免地會受到各種電磁信號的干擾。這些干擾信號可通過電源引入工頻干擾,通電鋼軌引入牽引供電回流電磁干擾,這些干擾也會給波形的正確識別帶來很大困難,體現在圖中即對應某段波形的跳動變化。
2 差分識別算法
2.1 物理識別方法 通過對過衡波形的分析得知,軌道衡車軸上下衡在波形上體現在波形的上升和下降。波形中上升沿和下降沿的斜率代表貨車通過的速度。速度越快,波形上升(下降)的斜率越陡,且這期間數據變化范圍很大。因此,利用此段波形的特點,可實現對車軸的上下衡進行判斷。
在列車勻速或低速通過測量區,車軸在平穩過渡到下一根車軸上(下)衡期間,其波形數據范圍變化不大,而在車軸上下衡的過渡過程中,波形數據變化非常大。針對這一特點,利用其大的波動范圍對數據進行差分識別車軸。由于定義車軸上下衡是在波形數據急劇上升或下降后又快速平緩的時刻點,因此,可通過以下方法進行判別。首先,定義一個閾值,進行數據差分結果判斷,差分結果跟閾值進行比較,只有在有限個數據連續都滿足閾值條件后,才繼續進行下一步判斷。隨后若另有有限個差分結果都小于閾值,則可認為車軸上下衡。
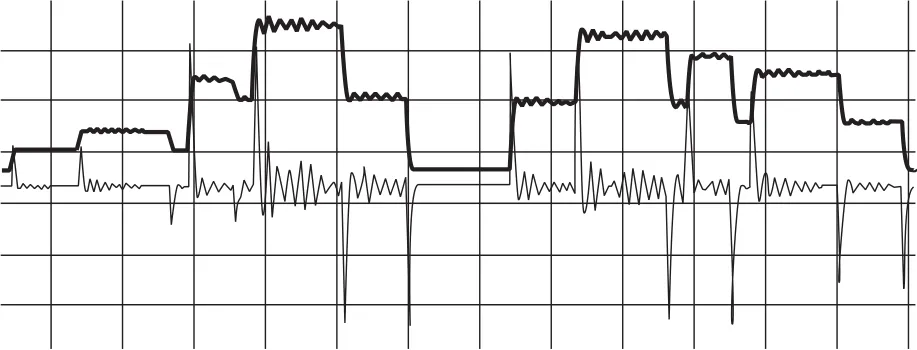
2.2 軟件差分算法 依據軌道衡數據波形的形成特點及測量原理,可以通過軟件編程實現軌道衡車軸的識別分析并顯示,以得到過衡車輛的基本信息。為了準確識別車輛的車軸信息,基于上述判斷方法,本文采用一種差分算法,以N個數據為一個比較單元,實現對車輛車軸上下衡的判斷[4]。
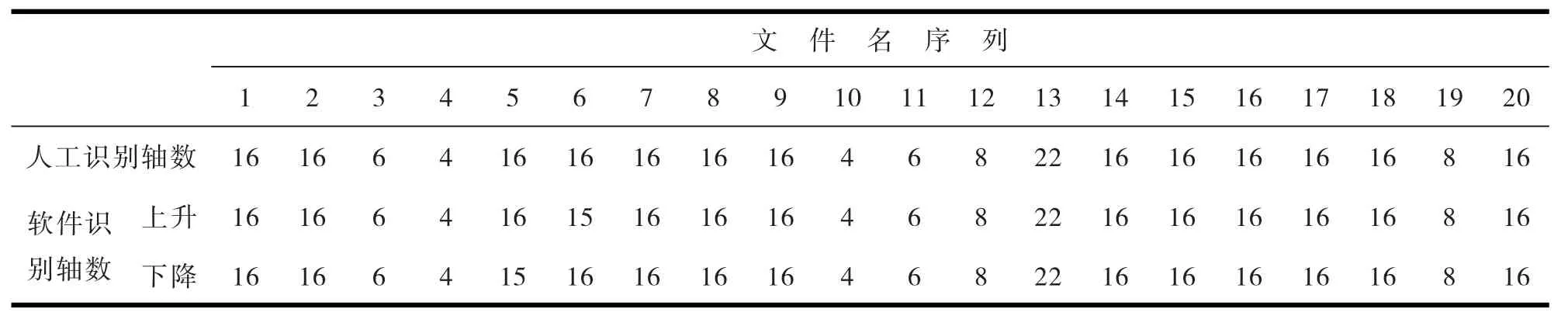
所有數據存放在變量X中,X的取值范圍為0 若Xi+1-Xi>M,則i+1;否則i=0; 若 i>N/2,則 i=0,k=1; 若k=1,且Xj+1-Xj 若 j>N/2;則 k=0,j=0;axle=1;則標記 XN/2作為一根車軸的識別點。 若上述條件有一不滿足,則退出后續判別,進行下一組數據判別。 式中Xi表示X中第i個數據;axle=1表示作為一根車軸上衡;Xj表示在滿足i>N/2時取的以后的數據點。同理 若Xi+1-Xi<-M,則i+1;否則i=0; 若 i>N/2,則 i=0,k=1; 若k=1,且Xj+1-Xj>-M,則j+1;否則j=0; 若 j>N/2;則 k=0,j=0;axle=1;則標記 XN/2作為一根車軸的識別點。 若上述條件有一不滿足,則退出后續判別,進行下一組數據判別。 式中Xj表示在滿足i>N/2時取的以后的數據點;axle=1表示作為一根車軸下衡。 在上述算法中,若計數變量的值超過了N,則進行下一個比較單元的判別。 2.3 算法步驟及流程圖 差分算法主要包括差值計算、閾值判斷、個數統計等環節。具體算法步驟如下: 第1步:將采集到的數據文件讀入程序。 第2步:以N個數據為一個比較單元,將其內數據進行差分運算。 第3步:每次得到的差值與設定閾值進行比較。若大于閾值,跳到第4步,否則跳到第8步。 第4步:滿足大于閾值的差值做1計數。并判斷計數個數是否超過N/2,若超過,則跳到第5步,否則跳到第8步。 第5步:再次判斷差值與設定閾值的關系。若小于閾值,則跳到第6步,否則跳到第8步。 第6步:若后續差值小于閾值則加1計數,并判斷計數個數是否超過N/2,若超過則跳到第7步,否則跳到第8步。 第7步:得出結果,判定為軸存在點。 第8步:取下一點。 通過上述分析,程序判別的流程可用圖3表示。 圖3 判軸流程示意圖 程序執行過程中,若有一個條件不滿足,則進行下一數據的判斷。必須同時滿足判別條件才能被認為是車軸識別點。若計數變量個數超過N,則進行另一組數據的判別。 3.1 差分運算 以4軸車輛轉向架計量方式為例,對上述差分算法進行實際驗證。取M=500,N=10,對數據文件進行一步差分運算,其結果如圖4所示。 圖4 數據一步差分效果圖 圖中上方代表某段實際過車波形,下方代表對應此波形的一步差分結果。 3.2 車軸識別 按照文中給出的差分算法,通過VC6.0編程軟件進行編程,實現對車軸的判別分析。經過差值計算、閾值判斷、個數統計等環節后,軟件識別結果如圖5所示。 圖5 車輛車軸識別效果圖 圖中每條豎線段代表一車輛車軸上衡或下衡的信息狀態,圖中波形上升變化后識別出的結果即代表一根軸上衡,下降變化后的波形識別出的結果代表一根軸下衡。 3.3 人工與軟件識別對比 為驗證此算法的有效性,根據物理識別與軟件算法思想,隨機挑選20個數據文件,進行人工識別與軟件識別對比驗證,結果見表1所示。通過表中可知,該算法具有較高的識別效果,在車軸過衡期間對數據產生的干擾有效地進行了排除,使其能準確識別。但仍存在個別識別錯誤現象(人工和軟件識別結果不匹配),如車軸虛判及漏判,通過觀察判別錯誤所在數據文件波形可知,這是由于車速過快,采樣率太低引起的,若車速控制在30 km/h以內,此算法可達到較高的識別精度。 通過以上方法可以得出,識別出一根車軸只有通過觀察軌道衡數據先急劇變化(增大或減小),再緩慢變化,才可以作為一根軸的判斷依據。不能同時滿足這2個條件的數據點,都不是真正的車軸上下衡點,而可能只是外界引起的波動較大的干擾點。 3.4 車重計算 若想準確表示出每根車軸的軸重,則可通過軟件編程,對每段平緩上下衡波形記錄其起始點和結束點,對期間的所有數據求取平均值[5],相鄰兩軸的波形做差,就可得到每根軸的重量,進而求出各轉向架的重量,將兩轉向架求和即得整車重量。由車軸軸重和載貨車輛重量的比例系數對應關系,就可以近似得到貨車的載重情況。 表1 人工識別與軟件識別結果對比圖 上述通過介紹轉向架計量方式下軌道衡數據波形的特點及形式多樣性,根據波形及數據特點,采用差分算法對車軸進行軟件識別,通過理論分析與實際算法編程實現,較好地實現了車軸的識別,達到了車軸識別的目的,有助于得出各轉向架的重量,進而求得車輛載重。該算法通用性好,對其它數據也達到了較好的識別效果。針對外界因素及自身引起的強烈干擾[6],此算法有效地進行了濾除,但針對仍存在個別誤判的現象,還需進行進一步研究。 [1]趙德永.動態軌道衡系統的波形分析[J].鐵道技術監督,2007.5:43~45 [2]金祚康.軌道衡[M].北京:中國計量出版社,1992 [3]葛立美.國產鐵路貨車[M].北京:中國鐵道出版社,1997 [4]劉春輝,徐健飛.Visual C++程序設計學習筆記[M].北京:電子工業出版社,2008. [5]張玉英.動態電子軌道衡系統設計與實現[D].大連:大連理工大學,2008 [6]張紅.列車超偏載動態檢測信號分析與處理方法研究[D].長沙:中南大學,2004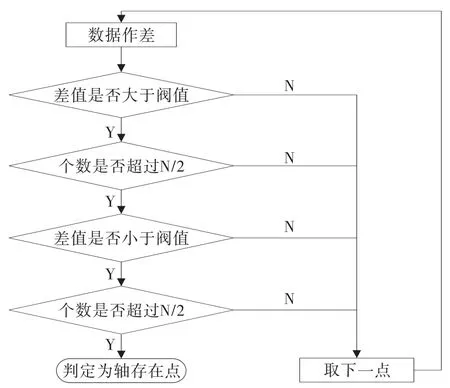
3 實例驗證
4 結束語
猜你喜歡
湖南大學學報·自然科學版(2025年6期)2025-07-16 00:00:00裝備制造技術(2021年5期)2021-08-14 01:44:56裝備制造技術(2021年2期)2021-07-21 05:38:24哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28制造技術與機床(2019年12期)2020-01-06 03:17:46經濟技術協作信息(2018年18期)2019-01-23 07:17:20西南交通大學學報(2018年5期)2018-11-08 10:58:26現代城市軌道交通(2018年5期)2018-05-28 02:19:35現代工業經濟和信息化(2016年1期)2016-05-17 05:33:38鐵道運營技術(2015年3期)2015-12-23 09:27:14