光伏與微型燃氣輪機混合微網(wǎng)能量管理研究
2012-08-07 08:13:58周念成王強鋼李春艷
電工技術(shù)學(xué)報 2012年1期
周念成 鄧 浩 王強鋼 李春艷
(重慶大學(xué)輸配電裝備及系統(tǒng)安全與新技術(shù)國家重點實驗室 重慶 400044)
1 引言
隨著新能源發(fā)電的推廣和應(yīng)用,微網(wǎng)技術(shù)已經(jīng)成為研究熱點。微網(wǎng)是指由分布式電源(DG)、儲能裝置及負荷組成的獨立可控系統(tǒng),并且就地提供電能和熱能[1]。微網(wǎng)中的微型電源包括風(fēng)力發(fā)電機(wind generator)、光伏電池(PV panel)、微型燃氣輪機(micro-turbine)及燃料電池(fuel cell)等。其中,光伏發(fā)電以資源豐富、分布廣泛、清潔等特點成為最具開發(fā)潛力的可再生能源之一[2]。由于光伏發(fā)電具有明顯間歇性,輸出功率受天氣變化影響大,為了提高光伏發(fā)電的可靠性,減小并網(wǎng)時對大電網(wǎng)的影響,需要加入可控微源或分布式儲能與光伏發(fā)電互補形成混合微網(wǎng)[3-6]。文獻[3]建立了含光伏陣列及燃料電池的微網(wǎng)模型,對光伏與燃料電池混合微網(wǎng)動態(tài)特性進行仿真分析;文獻[4]基于雙輸入Buck變換器提出了一種氫光聯(lián)合供電系統(tǒng)的能量管理控制策略,以實現(xiàn)光伏發(fā)電與燃料電池混合系統(tǒng)的能源優(yōu)化利用;文獻[5]設(shè)計了光伏與燃料電池混合并網(wǎng)發(fā)電系統(tǒng)模型的恒功率控制(unit power control)和饋線功率控制(feeder flow control)兩種運行模式,提出采用滯環(huán)方式靈活切換混合電源運行模式。為減小光伏與柴油發(fā)電孤立供電系統(tǒng)中光伏出力波動引起的系統(tǒng)頻率偏差;文獻[6]采用模糊推理方法協(xié)調(diào)多個光伏發(fā)電系統(tǒng)的出力,以平滑光伏發(fā)電系統(tǒng)的功率波動。與上述微源相比,微型燃氣輪機能同時供應(yīng)冷熱電負荷,具有排放少、效率高、燃料適應(yīng)性好和便于靈活控制等優(yōu)點[7-9],已成為冷熱電聯(lián)供微網(wǎng)中最有發(fā)展前景的分布式電源,因此有必要研究光伏與微型燃氣輪機組成的混合微網(wǎng)運行特性和能量管理。
光伏與微型燃氣輪機混合微網(wǎng)中光伏發(fā)電系統(tǒng)的出力波動具有隨機性,而微型燃氣輪機動態(tài)響應(yīng)速度較慢,具有十秒到幾十秒的延時[8-9],須配合蓄電池保證微網(wǎng)在各種運行狀態(tài)可靠供電。為抑制功率波動和減少蓄電池容量,混合微網(wǎng)能量管理中須引入實時負荷預(yù)測[10-12]。利用預(yù)測算法的超前時間量,可克服微型燃氣輪機響應(yīng)速度慢的缺點,實現(xiàn)微網(wǎng)穩(wěn)定運行和高效能量管理。本文建立了光伏發(fā)電和微型燃氣輪機動態(tài)模型,采用變步長時間序列法預(yù)測微網(wǎng)中光伏與負荷的等效負荷曲線,超前調(diào)度微型燃氣輪機出力,以平抑光伏和負荷的功率波動。由于研究中主要針對微型燃氣輪機與微網(wǎng)的電力交換問題,因此微網(wǎng)本地負荷僅考慮電力負荷。為了合理分配蓄電池的運行時間,提高蓄電池充放電效率,提出了一種多組蓄電池結(jié)構(gòu)的模塊化能量管理模式,利用PSCAD/EMTDC和Matlab聯(lián)合仿真驗證了所提出方法的正確性。
2 混合微網(wǎng)模型及特性分析
2.1 混合微網(wǎng)的結(jié)構(gòu)
光伏與微型燃氣輪機混合微網(wǎng)結(jié)構(gòu)如圖1所示,混合微網(wǎng)經(jīng)公共連接點(PCC)接入配電網(wǎng)。為便于微源的擴展及提高供電可靠性,微網(wǎng)采用交流母線連接方式。其中光伏發(fā)電系統(tǒng)采用單級逆變結(jié)構(gòu),光伏陣列經(jīng)過光伏逆變器及隔離升壓變壓器接入微網(wǎng);微型燃氣輪機采用單軸結(jié)構(gòu),燃氣渦輪與永磁同步發(fā)電機(PMSG)同軸相連,高速同步發(fā)電機輸出高頻交流電能,經(jīng)整流逆變后與交流母線相連;分布式儲能(distributed storage)采用蓄電池,兩端并聯(lián)電容以改善蓄電池動態(tài)響應(yīng)能力[13],通過接口變流器實現(xiàn)有功的雙向流通。
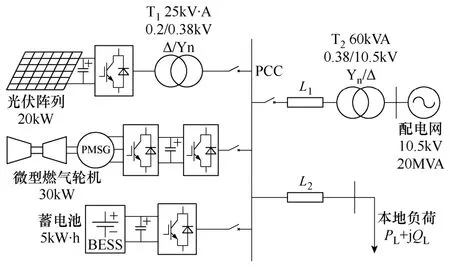
圖1 光伏與微型燃氣輪機混合微網(wǎng)結(jié)構(gòu)Fig.1 Structure of PV and micro-turbine hybrid micro-grid
2.2 光伏發(fā)電模型及特性分析
光伏發(fā)電模型由光伏陣列和逆變器組成,光伏陣列由若干光伏電池組件串并聯(lián)構(gòu)成。如圖2所示可采用受控電流源作為模型[14-15],圖中S和T分別為光照強度和光電池溫度,VA和IA分別為光伏陣列端電壓和輸出電流,Rs和Rsh分別為光伏陣列等效串聯(lián)和并聯(lián)電阻,IL為光電池組件短路電流,I0為二極管飽和電流。串聯(lián)NS和并聯(lián)NP個光電池組件的光伏陣列輸出電流IA為

式中,n為結(jié)常數(shù),n=1.5;q=1.6×10-19C為庫侖常數(shù);k=1.38×10-23J/K為玻耳茲曼常數(shù)。光電池組件短路電流IL取決于光照強度S和溫度T,而二極管的飽和電流I0僅與溫度T有關(guān),即
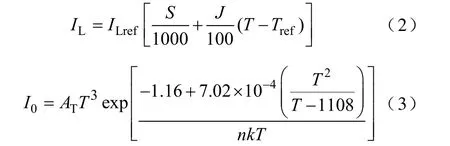
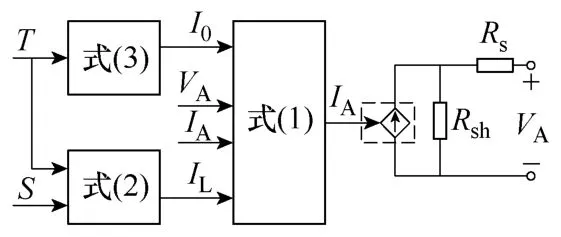
圖2 光伏陣列模型Fig.2 Model of PV array
光伏發(fā)電系統(tǒng)的控制結(jié)構(gòu)如圖3所示,圖中最大功率點跟蹤(MPPT)模塊生成光伏陣列直流電壓參考值Vdcref,經(jīng)功率控制模塊的比較器和PI環(huán)節(jié)生成交軸電流參考值ipvqref;功率控制模塊采用功率外環(huán)dq解耦控制,直軸電流參考值ipvdref由無功偏差信號Qpvref- Qpv經(jīng)PI控制生成,再由直接電流控制內(nèi)環(huán)跟蹤電流參考值。本文采用電導(dǎo)增量法實現(xiàn)光伏陣列最大有功功率的跟蹤[15],其通過比較光伏陣列的瞬時電導(dǎo)和電導(dǎo)變化量,實時計算直流參考電壓。
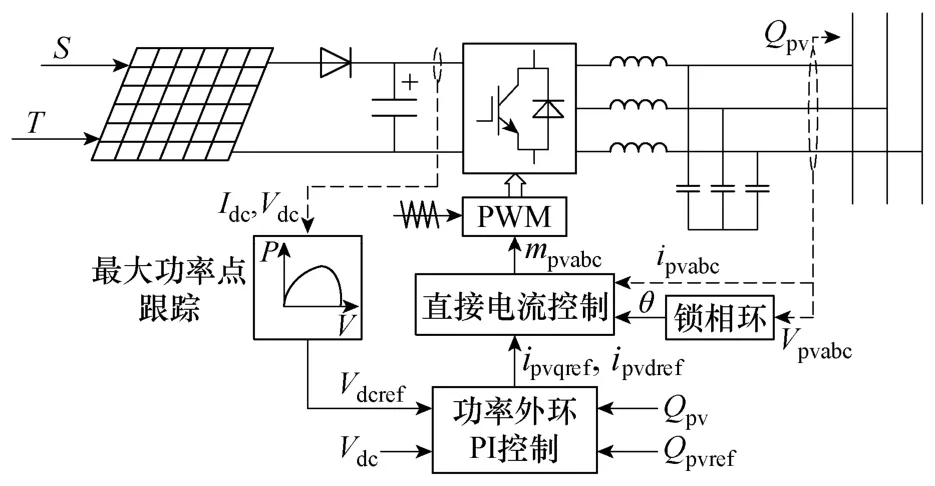
圖3 光伏發(fā)電系統(tǒng)控制結(jié)構(gòu)Fig.3 Control scheme of PV generation system
光伏陣列輸出功率取決于光照強度和光電池溫度,圖4為某地區(qū)光伏電站5月份三種典型天氣的光照強度和環(huán)境溫度,下標(biāo)sunny、cloudy和rainy分別表示晴天、晴轉(zhuǎn)多云和雨天。根據(jù)實測光照和溫度數(shù)據(jù)進行仿真(參數(shù)見附錄),可得到采用最大功率跟蹤控制策略時光伏發(fā)電系統(tǒng)的有功功率波形如圖4c所示。由于光照強度隨時間和天氣等因素變化不是一個穩(wěn)定值,光電池溫度除了受環(huán)境溫度影響外,還與光電池損耗發(fā)熱有關(guān),因而光伏發(fā)電系統(tǒng)的輸出功率隨著光照強度和溫度波動變化。
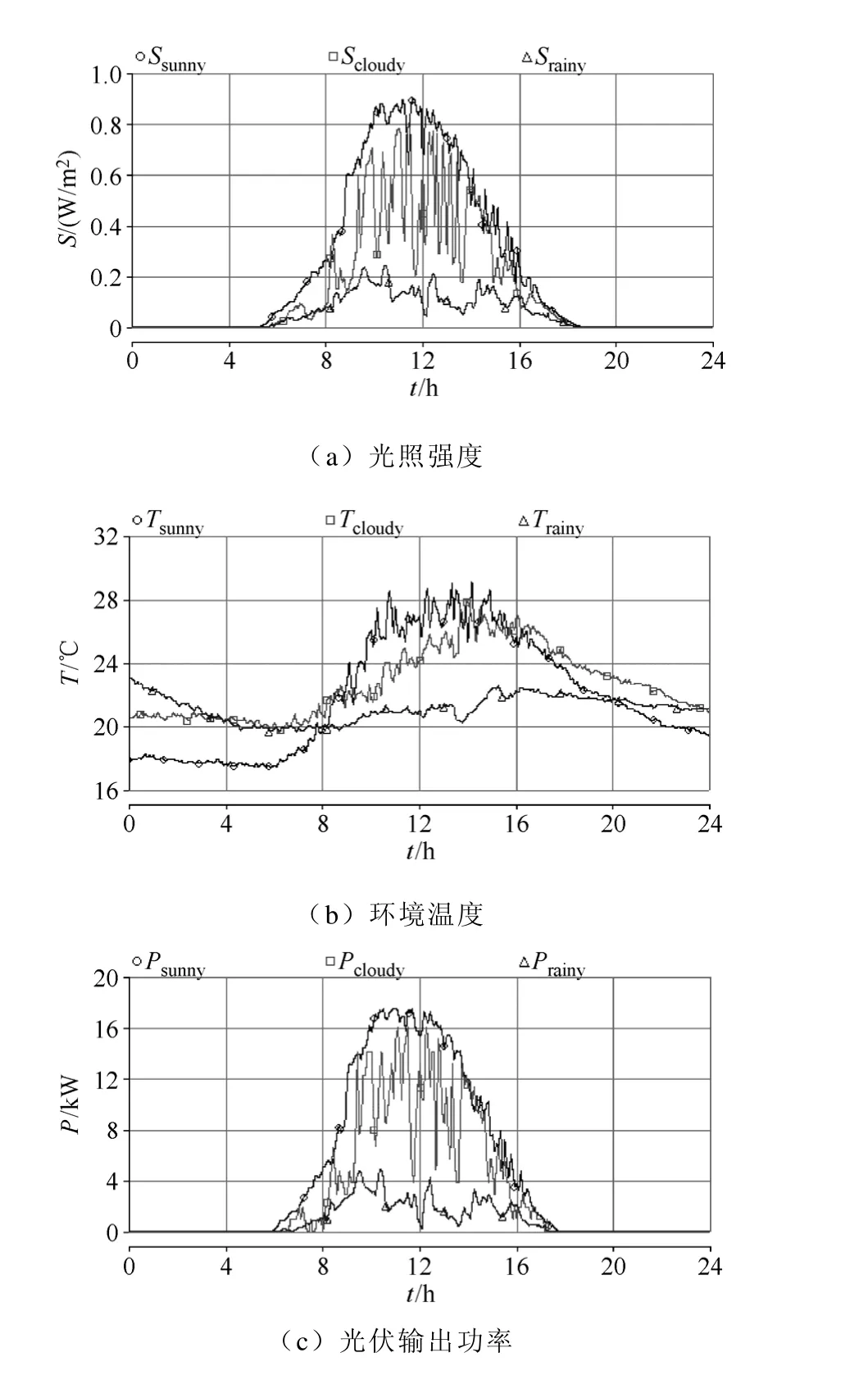
圖4 某地光照強度、環(huán)境溫度和光伏輸出功率曲線Fig.4 Light intensity,ambient temperature and output power curve of PV in someplace
2.3 微型燃氣輪機發(fā)電模型及特性分析
微型燃氣輪機發(fā)電系統(tǒng)由微型燃氣輪機、永磁同步發(fā)電機和雙脈寬調(diào)制(PWM)控制電力電子接口構(gòu)成。假定微型燃氣輪機工作在額定轉(zhuǎn)速附近,忽略燃燒時延時環(huán)節(jié)和回?zé)崞鲬T性作用,簡化后的微型燃氣輪機動態(tài)模型如圖5所示[9-16]。其中排氣口溫度函數(shù) f1和渦輪轉(zhuǎn)矩輸出函數(shù) f2分別為

式中,Tref為溫度參考值;u1為排氣口溫度;ω為發(fā)電機轉(zhuǎn)速;u2為進入渦輪的燃料流量。
溫度和轉(zhuǎn)速控制模塊分別產(chǎn)生兩種燃料指令FT和Fω,通過低值門作用后產(chǎn)生最終的燃料參考指令送入燃料系統(tǒng),最后由壓縮機渦輪系統(tǒng)輸出機械轉(zhuǎn)矩,不經(jīng)齒輪變速直接驅(qū)動永磁同步發(fā)電機,圖5中Fmin=0.23為空載時燃料系統(tǒng)的最小燃料流量,渦輪轉(zhuǎn)速ω由永磁同步電機測量得到。由于未研究微型燃氣輪機的開停機過程,故忽略加速度控制模塊;轉(zhuǎn)速控制環(huán)節(jié)是微型燃氣輪機在負荷變化時的主要執(zhí)行機構(gòu);溫度控制作用為限制燃料的輸入量來保護系統(tǒng)溫度不超過限定值。
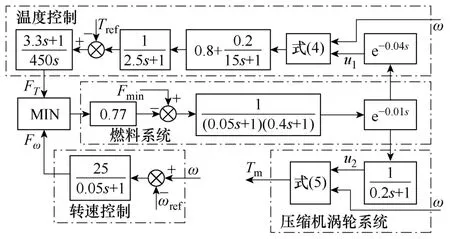
圖5 微型燃氣輪機模型Fig.5 Model of micro-turbine
單軸結(jié)構(gòu)的微型燃氣輪機須經(jīng)整流和逆變兩級電力電子變換后接入微網(wǎng),采用雙脈寬調(diào)制控制交直交電壓型變流器,控制結(jié)構(gòu)如圖6所示。圖中電機側(cè)和電網(wǎng)側(cè)變流器均采用同步旋轉(zhuǎn)dq坐標(biāo)系PI控制,利用功率外環(huán)PI調(diào)節(jié)生成參考電流dq軸分量,再由內(nèi)環(huán)電流反饋及補償控制使dq軸電流跟蹤參考值。電流內(nèi)環(huán)設(shè)置電流解耦補償將電流反饋線性化,引入電壓前饋補償減少電壓擾動對控制系統(tǒng)的影響。電機側(cè)整流器控制目標(biāo)為維持直流電壓,變流器參考電流d軸分量imdref設(shè)定為0;電網(wǎng)側(cè)逆變器采用PQ控制以實現(xiàn)微型燃氣輪機功率調(diào)節(jié)。
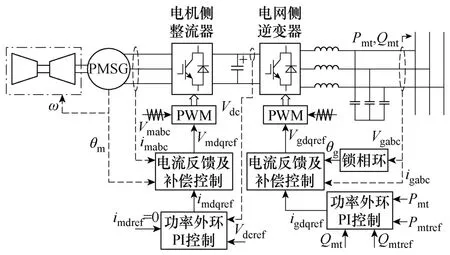
圖6 微型燃氣輪機發(fā)電系統(tǒng)控制結(jié)構(gòu)Fig.6 Control scheme of micro-turbine generation system
圖7顯示了微型燃氣輪機發(fā)電系統(tǒng)的負荷階躍變化響應(yīng)特性(參數(shù)見附錄),負荷每20s階躍變化50%從滿載到空載再到滿載。圖中給出了燃料流量Fuel、轉(zhuǎn)速ω 和輸出功率P的變化曲線,微型燃氣輪機空載時燃料流量為 Fmin。可以看出,直流側(cè)不配置儲能設(shè)備的微型燃氣輪機發(fā)電系統(tǒng)功率調(diào)節(jié)具有10s左右的延遲,不能響應(yīng)快速負荷變化,故微型燃氣輪機孤島運行時,需要配置儲能設(shè)備來改善動態(tài)性能。本文在混合微網(wǎng)中配置蓄電池作為微網(wǎng)的分布式儲能,經(jīng)電力電子接口直接并入微網(wǎng)交流母線,以便于微網(wǎng)的模塊化設(shè)計和規(guī)模擴展。
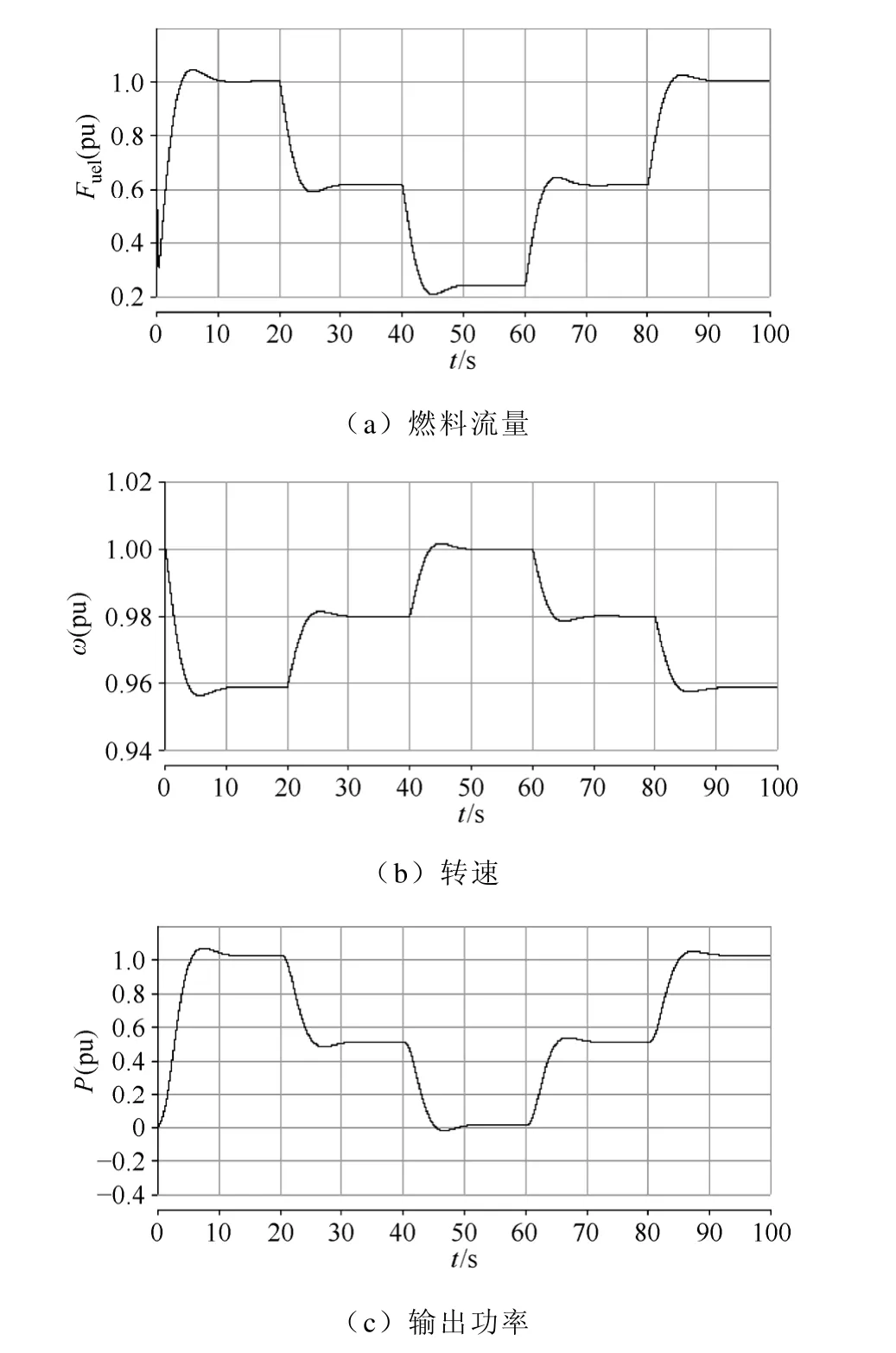
圖7 微型燃氣輪機發(fā)電系統(tǒng)負荷響應(yīng)特性曲線Fig.7 Load response curve of micro-turbine generation system
3 變步長時間序列的負荷預(yù)測算法
由于時間序列法僅需要前幾個時段的功率數(shù)據(jù),便于考慮突發(fā)事件對負荷影響加以修正,因此采用時間序列法預(yù)測微網(wǎng)中光伏與負荷的等效功率曲線。改進歐拉型移動平均預(yù)測算法(Modified Euler type Moving Average Prediction, EMAP)能對超前時間量為Tp的慢動態(tài)DG的功率參考值進行預(yù)測,已應(yīng)用于光伏發(fā)電系統(tǒng)的負荷預(yù)測[10-11]。設(shè)有N個采樣點x(k),x(k-1),…,x(k-N+1),采樣周期為Ts,則下一個時間間隔的EMAP預(yù)測值為
式中,ωi為權(quán)重系數(shù);預(yù)測時間超前量 Tp=(L-1)Ts/2+τ;L為步長;τ為慢動態(tài)DG的功率響應(yīng)延時。EMAP預(yù)測算法把N個采樣點按順序分M區(qū),將M-1個相鄰兩區(qū)數(shù)據(jù)平均值之差乘以權(quán)重系數(shù)ωi求和,除以 (N/M)Ts得到單位時間間隔的預(yù)測功率變化率 dyEMAP(k),再將 dyEMAP(k)乘以 Tp然后疊加 MA算法預(yù)測值即得到超前時間為 Tp的預(yù)測值。EMAP算法的z域模型如下:
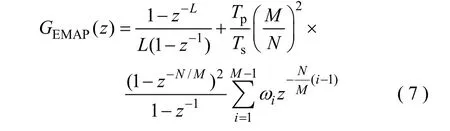
文獻[10]在N個采樣點順序分區(qū)時采用等間隔分區(qū)方式,取ωi=2(M-i)/(M2-M),i=1,2,3,··,M-1;文獻[11]則采用變間隔的方式分區(qū),改進了對功率變化率 dyEMAP(k)的預(yù)測。圖8為典型的晴天、晴轉(zhuǎn)多云和雨天光伏與負荷(負荷數(shù)據(jù)見圖13a)綜合功率Peq=Pload-Ppv的頻率特性曲線,可見雨天和晴天的等效負荷功率頻率分布基本相似,圖中區(qū)域B為晴轉(zhuǎn)多云天氣相對于其他兩種天氣增加的0.02~0.06Hz高頻分量。
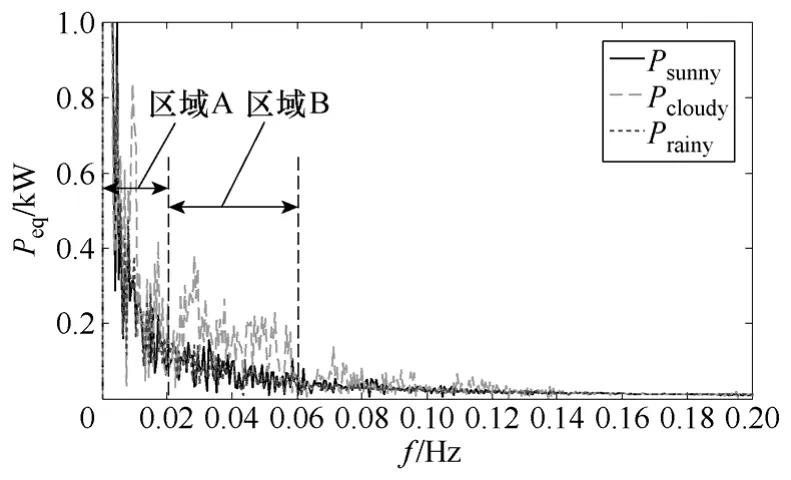
圖8 光伏與負荷綜合功率頻率特性Fig.8 Frequency characteristics of equivalent power of PV and load
設(shè)微型燃氣輪機延時τ =10s,采樣周期Ts=0.5s,采樣點數(shù)N=600,分區(qū)數(shù)M=12,可得移動平均步長L 取不同值時,EMAP算法的幅值和相位頻率特性如圖9所示。由圖可見,根據(jù)天氣預(yù)報情況變化EMAP的移動平均步長L,能夠改進預(yù)測算法對不同天氣情況的適應(yīng)性,改善EMAP算法的預(yù)測性能。本文針對晴轉(zhuǎn)多云天氣減小移動平均步長L,提高式(6)中近期負荷數(shù)據(jù)的預(yù)測權(quán)重,增大EMAP算法在0.02~0.06Hz高頻段的幅值,在采用EMAP算法超前調(diào)節(jié)微型燃氣輪機出力的同時,加強算法對光伏出力變化頻繁的晴轉(zhuǎn)多云天氣的預(yù)測效果。
圖9 EMAP預(yù)測算法頻率特性比較Fig.9 Frequency characteristics comparison of EMAP prediction algorithm
4 混合微網(wǎng)能量管理策略
4.1 能量管理策略及模塊化蓄電池管理
光伏與微型燃氣輪機混合微網(wǎng)并網(wǎng)運行時,采用聯(lián)絡(luò)線功率控制方式,使微網(wǎng)作為獨立可控單元,光伏發(fā)電系統(tǒng)處于MPPT模式,通過EMAP預(yù)測算法提前調(diào)度微型燃氣輪機出力,可克服微型燃氣輪機響應(yīng)速度慢的缺點,減小微網(wǎng)注入配電網(wǎng)功率的波動,此時蓄電池充、放電系統(tǒng)處于備用狀態(tài)。微網(wǎng)與配電網(wǎng)聯(lián)絡(luò)線功率參考值可根據(jù)日電價波動曲線由微網(wǎng)運營商和電網(wǎng)企業(yè)制定聯(lián)絡(luò)線的日功率調(diào)度曲線,進行混合微網(wǎng)并網(wǎng)時的功率管理[17]。
孤島運行時,微型燃氣輪機與蓄電池共同補償光伏與負荷功率差額,微型燃氣輪機承擔(dān)慢速變化功率,蓄電池承擔(dān)快速變化功率,采用預(yù)測方式超前調(diào)節(jié)微型燃氣輪機出力,能有效減小蓄電池的配置容量。圖10為光伏與微型燃氣輪機混合微網(wǎng)的能量管理結(jié)構(gòu)圖,圖中由PCC處的靜態(tài)開關(guān)BR來實現(xiàn)微網(wǎng)的并網(wǎng)和孤島模型的切換。為了合理分配蓄電池的運行時間,提高蓄電池充、放電效率,儲能蓄電池采用模塊化管理。
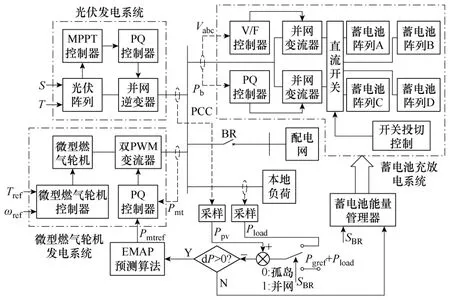
圖10 光伏與微型燃氣輪機混合微網(wǎng)能量管理結(jié)構(gòu)圖Fig.10 Energy management structure of PV and micro-turbine hybrid micro-grid
圖10中蓄電池的電力電子接口采用雙變流器結(jié)構(gòu)[18],其中PQ控制器結(jié)構(gòu)與圖6中電網(wǎng)側(cè)逆變器控制方式相同,V/F控制器采用定電壓和定頻率控制[19]。將蓄電池陣列分成4組,按功率調(diào)節(jié)作用分為能量備用和功率補償兩個狀態(tài),通過直流開關(guān)切換至PQ控制和V/F控制變流器直流側(cè)。圖11為蓄電池直流開關(guān)柜結(jié)構(gòu)圖,開關(guān)投切控制器根據(jù)蓄電池能量管理器的指令,動作開關(guān)柜中S1~S4的直流開關(guān),實現(xiàn)蓄電池陣列的模塊化管理。
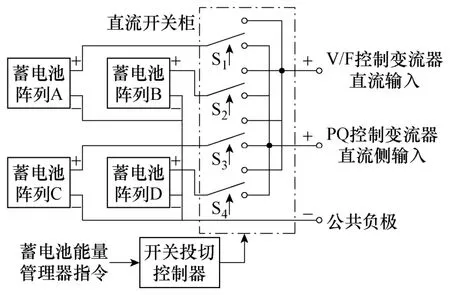
圖11 蓄電池直流開關(guān)柜結(jié)構(gòu)圖Fig.11 DC switchgear structure of battery
4.2 并網(wǎng)運行
為提高蓄電池的使用壽命和運行可靠性,微網(wǎng)并網(wǎng)時由配電網(wǎng)平抑微型燃氣輪機的功率調(diào)節(jié)誤差,蓄電池充放電系統(tǒng)處于備用狀態(tài)。微型燃氣輪機根據(jù)光伏發(fā)電系統(tǒng)的出力歷史采樣數(shù)據(jù)Ppv,結(jié)合微網(wǎng)與配電網(wǎng)聯(lián)絡(luò)線的功率參考值 Pgref,利用前述的EMAP算法考慮功率調(diào)節(jié)時延預(yù)測微型燃氣輪機的功率參考值Pmtref進行超前功率控制。
并網(wǎng)運行時蓄電池V/F控制變流器處于閉鎖狀態(tài);PQ控制變流主要用于備用蓄電池的充電,此外還可以對蓄電池進行定期的放電性能測試。選取 3組蓄電池陣列作為能量備用蓄電池,由 PQ控制變流器充滿電以待微網(wǎng)孤島運行時使用;預(yù)留1組蓄電池陣列用于微網(wǎng)孤島時補償動態(tài)響應(yīng)緩慢的微型燃氣輪機功率調(diào)節(jié)誤差,平滑光伏和負荷功率的快速變化。
4.3 孤島運行
由于微型燃氣輪機的動態(tài)響應(yīng)速度緩慢,光伏與微型燃氣輪機混合微網(wǎng)孤島運行時,失去大電網(wǎng)的電壓和頻率支持,蓄電池的V/F控制變流器開始運行,為孤島微網(wǎng)提供電壓和頻率支撐,快速補償混合微網(wǎng)中光伏與負荷的功率變化。此時微型燃氣輪機仍采用超前預(yù)測 PQ功率控制,作為孤島微電網(wǎng)負荷供電的主要能源形式。孤島時蓄電池 PQ控制變流器處于閉鎖狀態(tài),其能量管理器通過檢測V/F變流器直流側(cè)蓄電池陣列的電壓和電流,利用蓄電池的三階模型[20]在線監(jiān)測功率補償狀態(tài)的蓄電池荷電狀態(tài)(State of Charge, SOC),控制直流開關(guān)投切將并網(wǎng)時已充滿電的能量備用蓄電池逐個切換至功率補償狀態(tài)。
蓄電池陣列狀態(tài)切換規(guī)則如下表所示,并網(wǎng)運行時蓄電池陣列A、B和C處于能量備用狀態(tài),微網(wǎng)轉(zhuǎn)入孤島后蓄電池陣列C和B依次切換到功率補償狀態(tài)。為合理分配蓄電池陣列的運行時間,提高蓄電池的使用效率,微網(wǎng)并網(wǎng)重連時備用蓄電池的選擇采用輪換制,即孤島運行結(jié)束轉(zhuǎn)入并網(wǎng)時,按投入V/F逆變器直流側(cè)時間的先后順序,優(yōu)先選擇投入時間靠前的蓄電池作為備用蓄電池。下表中從孤島運行再重新并入配電網(wǎng)時,由于蓄電池陣列A仍充滿電保持備用狀態(tài)不變,按蓄電池陣列 D、C和B投入V/F變流器側(cè)的時間順序,選擇蓄電池陣列D和C切換至備用狀態(tài)。
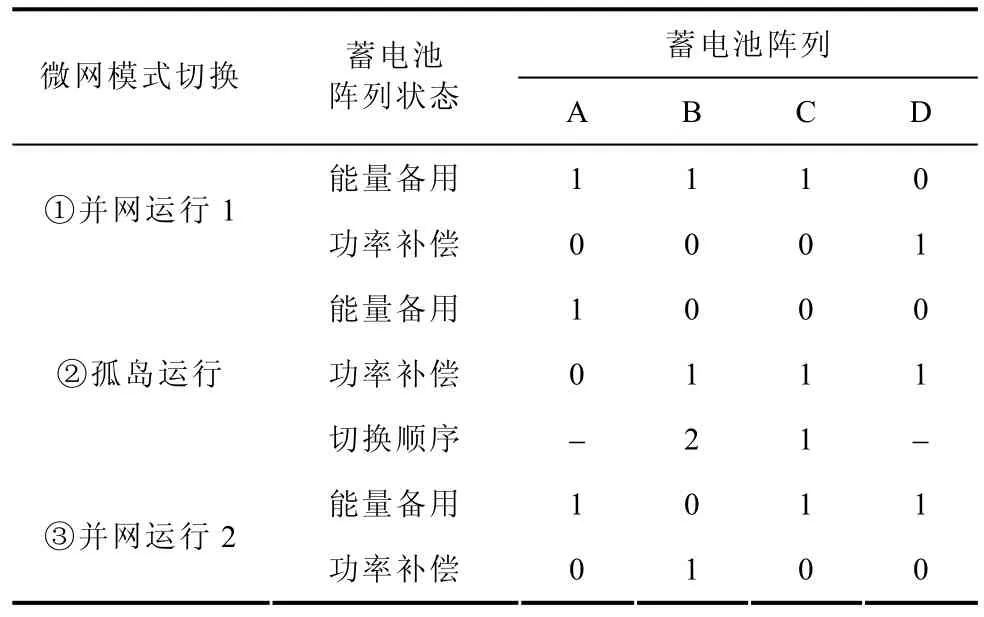
表 蓄電池陣列狀態(tài)切換規(guī)則Tab.State switching rules of battery array
孤島時一旦光伏發(fā)電系統(tǒng)的輸出功率大于微網(wǎng)本地負荷,多余的電能經(jīng)V/F變流器為蓄電池陣列充電。由于微網(wǎng)蓄電池容量配置時,必須選擇放電或充電容量中的最大值,為避免蓄電池配置容量按最大充電容量選取,光伏與微型燃氣輪機混合微網(wǎng)組網(wǎng)設(shè)計時可適當(dāng)增加本地負荷容量,還有利于提高微型燃氣輪機的利用率。
5 仿真分析
在PSCAD/EMTDC仿真平臺中建立圖1所示的光伏與微型燃氣輪機混合微網(wǎng)仿真模型,并在Matlab中實現(xiàn)前述的能量管理策略,組建圖 12所示的聯(lián)合仿真系統(tǒng)。仿真模型中負荷采用受控電流源模擬,負荷有功按圖13所示負荷曲線變化,設(shè)負荷消耗無功恒定不變,光伏和微型燃氣輪機采用前文所述的詳細模型;混合仿真中將24h等效成288s進行計算,由于PSCAD/EMTDC單次仿真的數(shù)據(jù)量有限,本文利用 PSCAD/EMTDC軟件的快照(Snapshot)功能分段進行仿真,有效地實現(xiàn)了微網(wǎng)仿真的同時性[21]。針對光伏出力變化較大的晴轉(zhuǎn)多云天氣,分析所建的微網(wǎng)模型在全天24h并網(wǎng)和孤島運行過程中的動態(tài)特性,并比較了采用EMAP預(yù)測算法前后混合微網(wǎng)的蓄電池容量配置情況。
改革需要調(diào)整傳統(tǒng)的利益格局。建立完善科學(xué)合理的人員分類管理機制,推行法官、檢察官的員額制改革,提高法官、檢察官的職業(yè)尊榮感,讓能辦案的人投入一線真正辦案,極大提高了法官、檢察官隊伍的正規(guī)化、專業(yè)化、職業(yè)化水平。
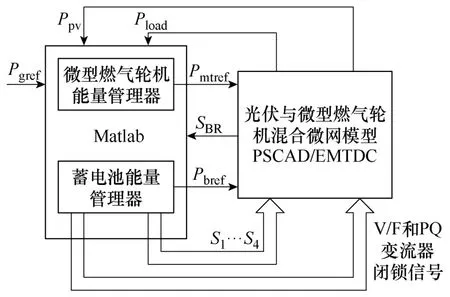
圖12 PSCAD/EMTDC和Matlab聯(lián)合仿真系統(tǒng)Fig.12 PSCAD/EMTDC and Matlab joint simulation system
5.1 并網(wǎng)運行
光伏與微型燃氣輪機混合微網(wǎng)并網(wǎng)運行時,光伏陣列按最大有功功率輸出,指定其無功功率參考值恒為 0;微型燃氣輪機補償光伏陣列輸出的有功功率,使注入配電網(wǎng)功率可調(diào)度,取注入配電網(wǎng)可調(diào)度功率參考值Pgref如圖14a所示,功率參考值每隔 2h變化一次,實際運行中可根據(jù)電力系統(tǒng)調(diào)度部門指令進行取值。圖13為光伏和微源輸出有功Ppv和 Pmt的波形,圖 13a中 Ppv是圖 4中某地晴轉(zhuǎn)多云天氣下光伏的輸出功率,由MPPT控制器調(diào)節(jié)直流母線電壓,以追蹤光伏陣列的最大功率運行點;圖13b為預(yù)測前后微型燃氣輪機輸出功率,加入預(yù)測后,微型燃氣輪機能提前調(diào)度輸出功率來克服其響應(yīng)慢的缺點。
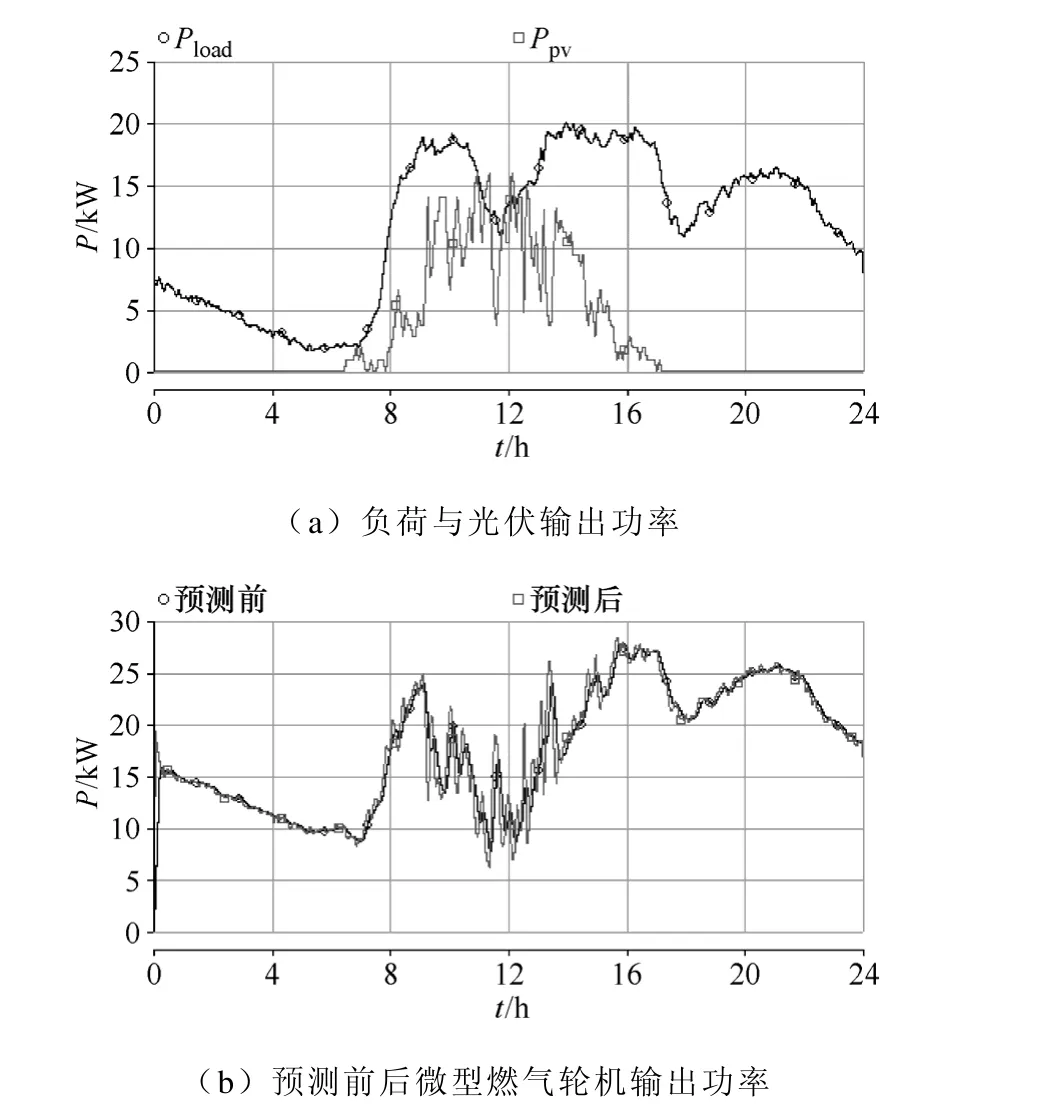
圖13 并網(wǎng)運行時負荷和微源輸出有功功率Fig.13 Active power of load and microsources in connection mode
圖14為并網(wǎng)運行時加入超前預(yù)測前后微網(wǎng)與配電網(wǎng)聯(lián)絡(luò)線的有功功率。圖14b加入超前預(yù)測時注入配電網(wǎng)有功功率,在光伏出力波動頻繁的白天時間段,其相對于 Pgref的功率偏差主要集中在±2kW左右;圖14c為不加入超前預(yù)測時注入配電網(wǎng)的有功功率,其功率控制偏差集中在±4kW左右,光伏功率波動越大的時段加入預(yù)測前后的差別越明顯。可見利用EMAP算法對微型燃氣輪機出力進行超前預(yù)測調(diào)節(jié),能夠有效減小微網(wǎng)與配電網(wǎng)聯(lián)絡(luò)線功率波動。
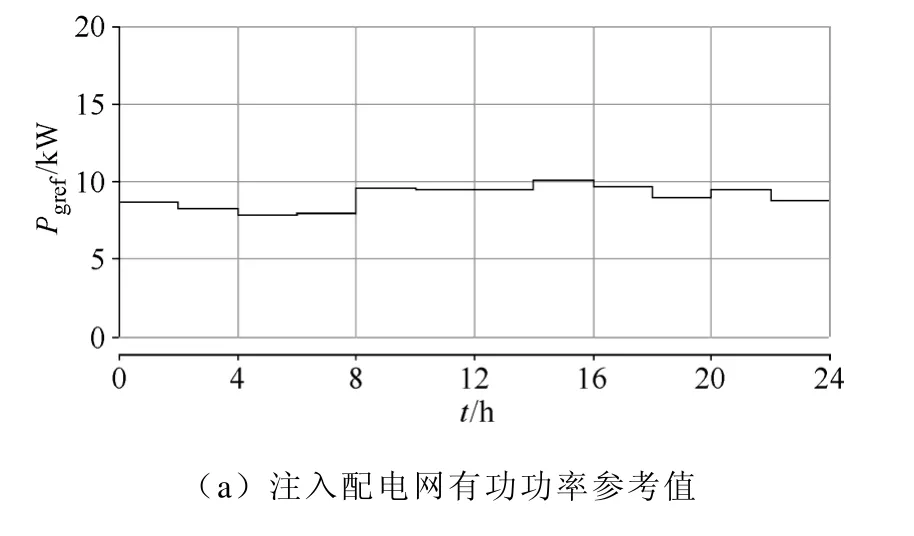
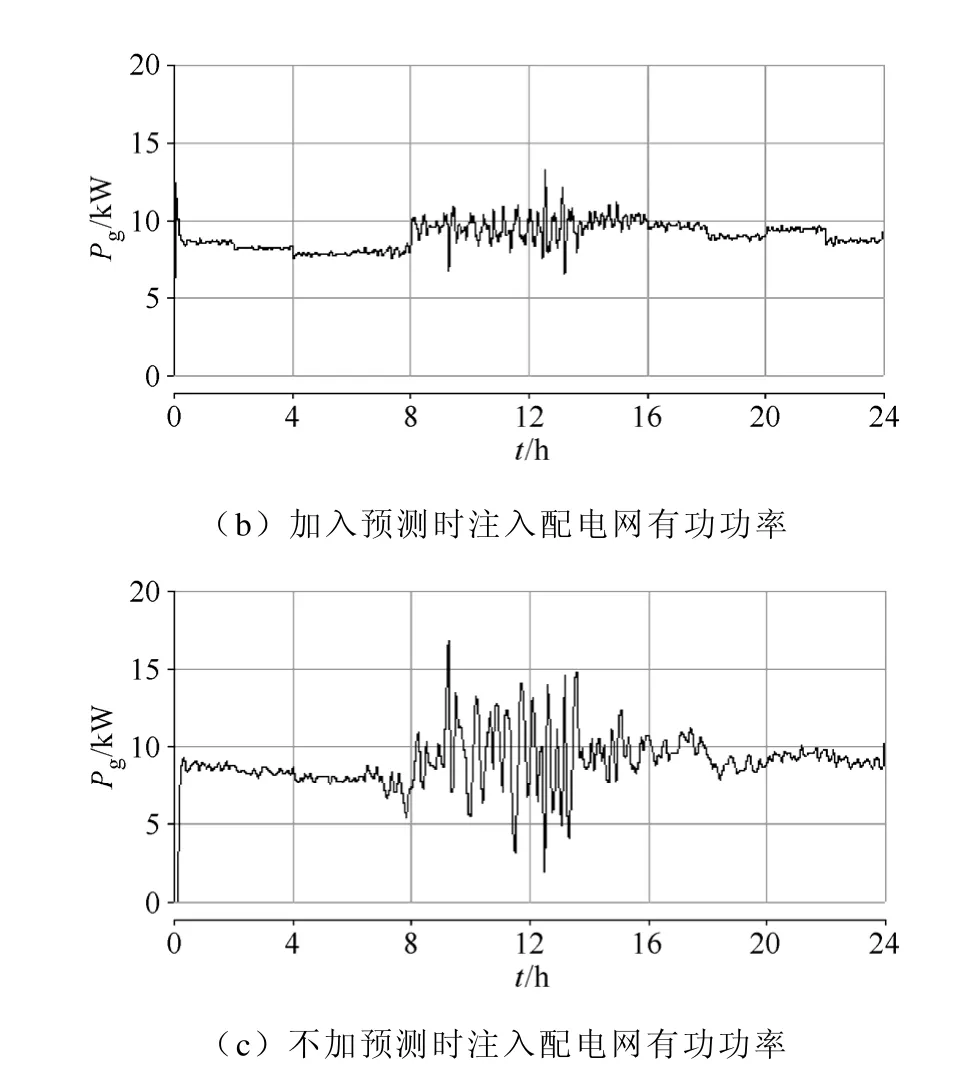
圖14 并網(wǎng)運行時注入配電網(wǎng)有功功率比較Fig.14 Active power comparison of distribution grid in connection mode
5.2 并網(wǎng)與孤島模式切換
設(shè)t=8h時配電網(wǎng)出現(xiàn)三相短路故障,光伏與微型燃氣輪機混合微網(wǎng)PCC處的開關(guān)隨即動作,使微網(wǎng)由并網(wǎng)轉(zhuǎn)到孤島模式運行,t=16h時混合微網(wǎng)與配電網(wǎng)重連,負荷功率、光伏光照及溫度與 5.1節(jié)相同。微網(wǎng)聯(lián)絡(luò)線的有功和無功功率如圖15a所示,可見并網(wǎng)運行時聯(lián)絡(luò)線有功仍按照給定指令變化,并由配電網(wǎng)提供無功支撐。
圖15b為微型燃氣輪機輸出的有功和無功功率,由于功率調(diào)節(jié)速度緩慢,須采用蓄電池作為主控單元,平滑負荷和光伏發(fā)電系統(tǒng)的快速功率波動,維持電壓和頻率的穩(wěn)定。圖15c為蓄電池輸出有功和無功功率,并網(wǎng)運行時大電網(wǎng)提供電壓與頻率支撐,當(dāng)切換為孤島運行時,由蓄電池承擔(dān)快速變化負荷變化,并維持負荷的電壓與頻率的穩(wěn)定。
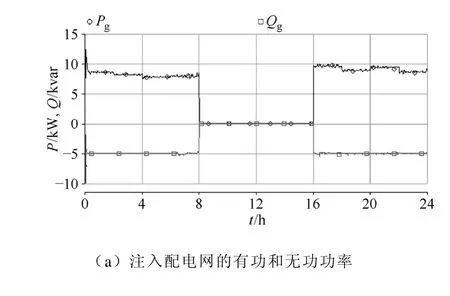
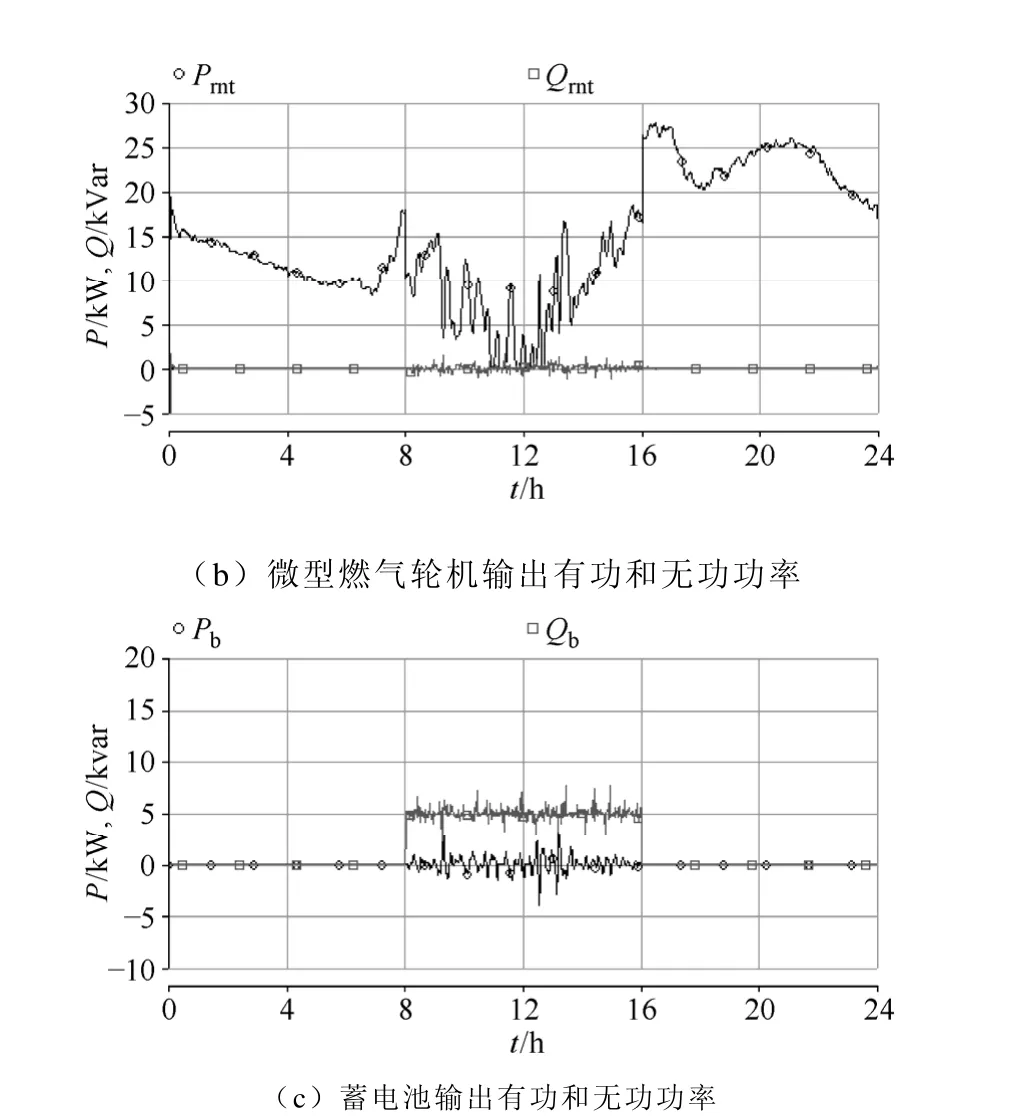
圖15 模式切換時微源和注入配電網(wǎng)的有功和無功功率Fig.15 Active and reactive power of microsources and distribution grid during mode switching
蓄電池陣列的開關(guān)狀態(tài)和V/F變流器直流側(cè)電壓如圖16所示。由圖16a可知功率補償蓄電池陣列的 SOC小于SOCmin=0.1時,備用狀態(tài)蓄電池則逐個切換到V/F變流器直流側(cè),通過蓄電池陣列的狀態(tài)投切以減少蓄電池充放電次數(shù),提高分布式儲能蓄電池的使用效率。孤島運行中蓄電池用于補償快速小幅的負荷波動,圖16c中V/F變流器直流側(cè)電壓亦在850~750V間波動變化,在t =12.5h時由于光伏出力下降率高于微型燃氣輪機的出力調(diào)節(jié)速率,導(dǎo)致V/F變流器直流電壓短時低于700V。
圖17為并網(wǎng)與孤島模式切換時負荷節(jié)點電壓Vload和頻率 f波形,孤島時由于蓄電池支撐微網(wǎng)的電壓與頻率,負荷電壓維持在0.985(pu)左右,頻率在(50±0.1)Hz范圍內(nèi),可見本文提出的能量管理策略能夠滿足微網(wǎng)不同狀態(tài)切換要求。
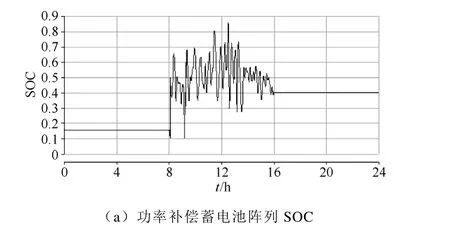
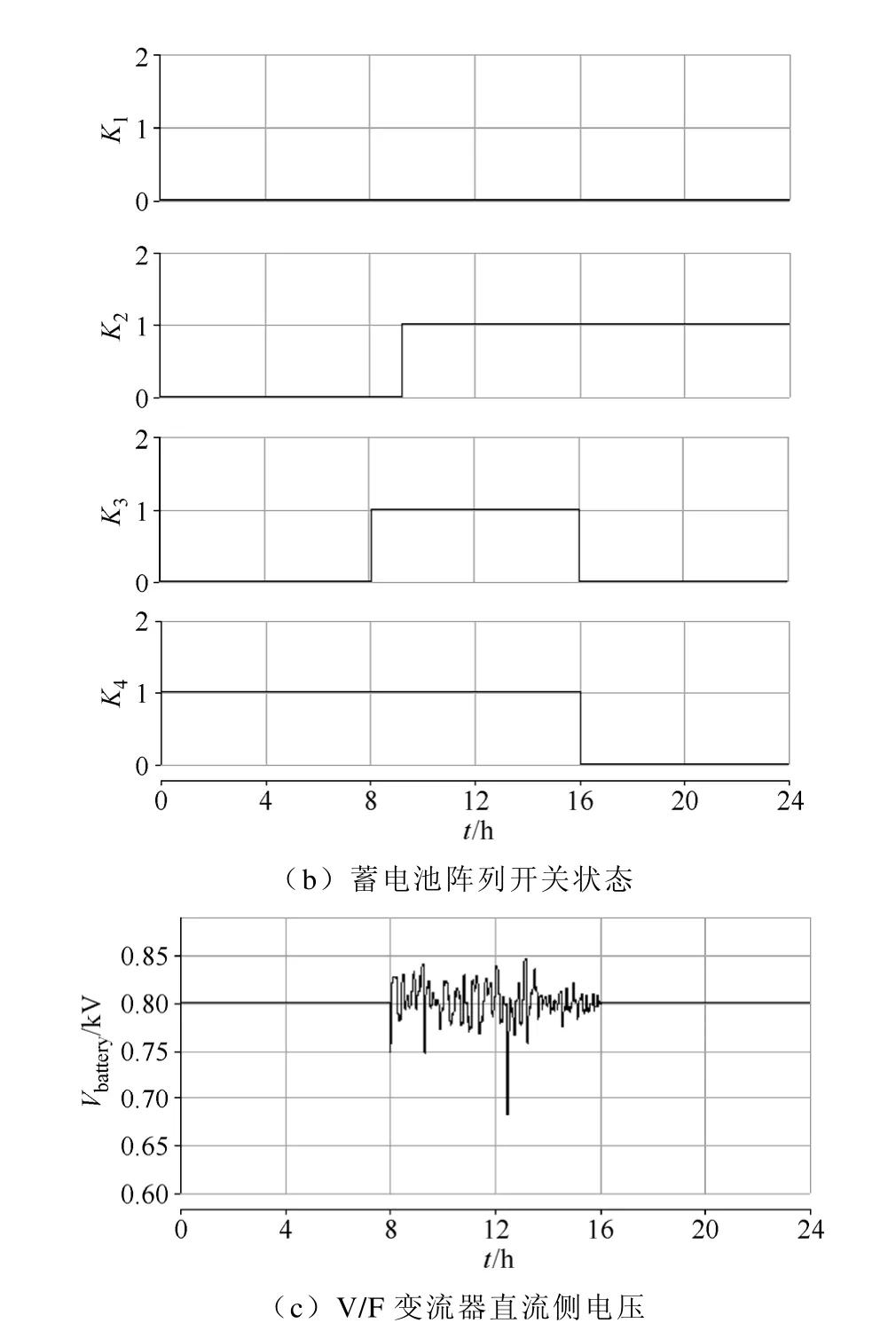
圖16 功率補償蓄電池SOC、蓄電池開關(guān)狀態(tài)和V/F變流器直流側(cè)電壓Fig.16 SOC of battery with power compensation, switch state of battery and DC voltage of V/F converter
圖17 模式切換時負荷節(jié)點電壓和頻率Fig.17 Voltage and frequency of load bus during mode switching
5.3 孤島運行
圖18為混合微網(wǎng)全天24h孤島運行時微型燃氣輪機的輸出有功,負荷功率、光伏光照及溫度仍與5.1節(jié)相同,圖中當(dāng)光伏的出力大于本地負荷時,微型燃氣輪機的出力減小為 0,此時蓄電池通過 V/F變流器吸收孤島微網(wǎng)的多余電能。圖19a為孤島運行加入超前預(yù)測時蓄電池輸出有功,與圖19b不加預(yù)測時輸出功率相比,蓄電池在加入預(yù)測后輸出功率波動較小,功率變化率也相對較小。
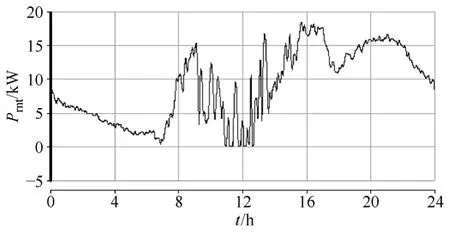
圖18 孤島運行時微型燃氣輪機輸出有功功率Fig.18 Active power of micro-turbine during islanding
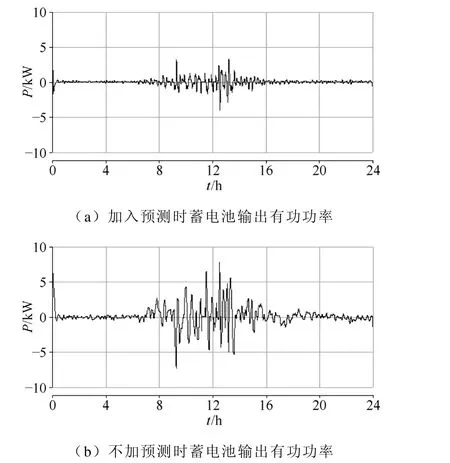
圖19 孤島運行時蓄電池輸出有功功率比較Fig.19 Active power comparison of battery during islanding
圖20為加入超前預(yù)測前后蓄電池容量Eb變化情況,加入預(yù)測時須配置的4組蓄電池總?cè)萘恐辽贋?.2kW·h,不加預(yù)測時須配置蓄電池的總?cè)萘恐辽偌s為 1.8kW·h。可以看出,利用 EMAP算法預(yù)測光伏與負荷功率差額,可克服微型燃氣輪機的動態(tài)響應(yīng)延時,減小微網(wǎng)須配置的蓄電池容量。
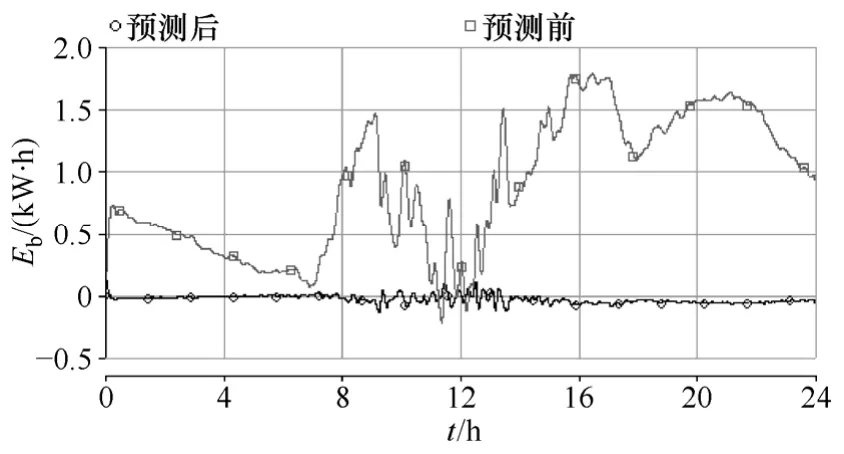
圖20 孤島運行時蓄電池容量大小比較Fig.20 Capacity size comparison of battery during islanding
6 結(jié)論
光伏發(fā)電和負荷綜合功率具有顯著的隨機波動特性,而微型燃氣輪機的動態(tài)響應(yīng)速度較慢,功率調(diào)節(jié)延時為十秒至幾十秒。本文在研究光伏、微型燃氣輪機的動態(tài)模型基礎(chǔ)上,提出了光伏與微型燃氣輪機混合微網(wǎng)能量管理策略;根據(jù)光伏和負荷功率波動的頻率特性,混合微網(wǎng)能量管理中加入了變步長的EMAP實時負荷預(yù)測;為了有效減少蓄電池的容量,提高其利用率和工作壽命,提出了一種模塊化的蓄電池能量管理模型。通過仿真分析驗證了本文提出的方法和能量管理策略的正確性,為光伏和微型燃氣輪機混合微網(wǎng)的運行和能量管理提供一種有效的解決方案。
附 錄 光伏與微型燃氣輪機混合微網(wǎng)模型參數(shù)
1.光伏發(fā)電系統(tǒng)參數(shù)
光電池組件額定功率PN_module=53W;
額定工況(光照 S=1000W/m2,溫度 T=298K)時光電池組件開路電壓Voc=21.7V;
額定工況時光電池組件峰值電流Isc=3.35A;
光電池組件峰值電壓Vmp=17.4V;
光電池組件峰值電流Imp=3.05A;
單個光電池組件含光電池單元個數(shù)m=36;組件串聯(lián)個數(shù)NS=25;
組件并聯(lián)個數(shù)NP=15;
光伏陣列額定功率PN_array=25×15×0.053=19.875kW。
2.微型燃氣輪機參數(shù)
額定功率PN_MT=30kW;
額定轉(zhuǎn)速ωN=60000r/min;
額定電壓VN_MT=480V;
轉(zhuǎn)動慣量J=4.64×10-3kg·m2;
排氣口參考溫度Tref=950℃。
3.蓄電池參數(shù)
蓄電池額定電壓VN_b=800V;
蓄電池采用Rs-Rp//Cp模型,其中Rs=9Ω、Rp=7.5Ω、Cp=2×10-3F;
V/F和PQ變流器直流側(cè)并聯(lián)電容均為Cdc=3F。
4.線路參數(shù)
所有0.38kV線路單位參數(shù)相同ZL=0.642+j0.083Ω/km,L1=1km,L2=0.1km。
5.變壓器阻抗參數(shù)
RT1=0.04(pu),XT1=0.03(pu),RT2=0.01(pu),XT2=0.05(pu),變壓器額定參數(shù)見圖1。
6.變電站參數(shù)
額定電壓10.5kV;
短路容量20MVA,X/R=10。
[1]Nikkhajoei H, Lasseter R H.Distributed generation interface to the CERTS microgrid[J]. IEEE Transactions on Power Delivery, 2009, 24(3):1598-1608.
[2]Roman E, Alonso R, Ibanez P, et al.Intelligent PV module for grid-connected PV systems[J].IEEE Transactions on Industrial Electronics, 2006, 53(4):1066-1073.
[3]陶瓊, 吳在軍, 程軍照, 等.含光伏陣列及燃料電池的微網(wǎng)建模與仿真[J].電力系統(tǒng)自動化, 2010,34(1): 89-93.Tao Qiong, Wu Zaijun, Cheng Junzhao, et al.Modeling and simulation of microgrid containing photovoltaic array and fuel cell[J].Automation of Electric Power Systems, 2010, 34(1): 89-93.
[4]徐敏, 阮新波, 劉福鑫, 等.氫光聯(lián)合供電系統(tǒng)的能量管理[J].電工技術(shù)學(xué)報, 2010, 25(10): 166-175.Xu Min, Ruan Xinbo, Liu Fuxin, et al.Energy management for hybrid photovoltaic-fuel cell power system[J].Transactions of China Electrotechnical Society, 2010, 25(10): 166-175.
[5]Khanh L N, Seo J J, Kim Y S, et al.Power management strategies for a grid-connected PV-FC hybrid system[J].IEEE Transactions on Power Delivery, 2010, 25(3): 1874-1882.
[6]Datta M, Senjyu T, Yona A, et al.A coordinated control method for leveling PV output power fluctuations of PV-diesel hybrid systems connected to isolated power utility[J].IEEE Transactions on Energy Conversion, 2009, 24(1): 153-162.
[7]趙克, 耿加民, 汪之文, 等.微型燃氣輪機發(fā)電系統(tǒng)啟動過程控制[J].電工技術(shù)學(xué)報, 2009, 24(2):48-53.Zhao Ke, Geng Jiamin, Wang Zhiwen, et al.Start process control techniques for the microturbine generation system[J]. Transactions of China Electrotechnical Society, 2009, 24(2): 48-53.
[8]Saha A K, Chowdhury S, Chowdhury S P, et al.Modeling and performance analysis of a microturbine as a distributed energy resource[J].IEEE Transactions on Energy Conversion, 2009, 24(2): 529-538.
[9]劉君, 穆世霞, 李巖松, 等.微電網(wǎng)中微型燃氣輪機發(fā)電系統(tǒng)整體建模與仿真[J].電力系統(tǒng)自動化,2010, 34(7): 85-89.Liu Jun, Mu Shixia, Li Yansong, et al.Overall modeling and simulation of microturbine generation systems in microgrids[J].Automation of Electric Power Systems, 2010, 34(7): 85-89.
[10]Monai T, Takano I, Nishikawa H, et al.A collaborative operation method between new energy-type dispersed power supply and EDLC[J].IEEE Transactions on Energy Conversion, 2004,19(3): 590-598.
[11]Kong Lingzhi, Tang Xisheng, Qi Zhiping.Study on modified EMAP model and its application in collaborative operation of hybrid distributed power generation system[C].Proceedings of the 1st International Conference on Sustainable Power Generation and Supply, Nanjing, China, 2009: 1-7.
[12]陳昌松, 段善旭, 殷進軍, 等.基于發(fā)電預(yù)測的分布式發(fā)電能量管理系統(tǒng)[J].電工技術(shù)學(xué)報, 2010,25(3): 150-156.Chen Changsong, Duan Shanxu, Yin Jinjun, et al.Energy management system of distributed generation based on power forecasting[J].Transactions of China Electrotechnical Society, 2010, 25(3): 150-156.
[13]Wang X Y, Vilathgamuwa D M, Choi S S.Determination of battery storage capacity in energy buffer for wind farm[J].IEEE Transactions on Energy Conversion, 2008, 23(3): 868-878.
[14]Chenni R, Makhlouf M, Kerbache T, et al.A detailed modeling method for photovoltaic cells[J].Energy,2007, 32(9): 1724-1730.
[15]Kim S K, Jeon J H, Cho C H, et al.Modeling and simulation of a grid-connected PV generation system for electromagnetic transient analysis[J].Solar Energy, 2009, 83(5): 664-678.
[16]王成山, 馬力, 王守相.基于雙 PWM 換流器的微型燃氣輪機系統(tǒng)仿真[J].電力系統(tǒng)自動化, 2008,32(1): 56-60.Wang Chengshan, Ma Li, Wang Shouxiang.Simulation of a microturbine system based on double PWM converters[J].Automation of Electric Power Systems, 2008, 32(1): 56-60.
[17]Bae I S, Kim J O.Reliability evaluation of distributed generation based on operation mode[J].IEEE Transactions on Power Systems, 2007, 22(2):785-790.
[18]魯鴻毅, 何奔騰.超級電容器在微型電網(wǎng)中的應(yīng)用[J].電力系統(tǒng)自動化, 2009, 33(2): 87-91.Lu Hongyi, He Benteng.Application of the super-capacitor in a microgrid[J].Automation of Electric Power Systems, 2009, 33(2): 87-91.
[19]Wang Caisheng.Modeling and control of hybrid wind/ photovoltaic/ fuel cell distribution systems[D].Montana: Montana State University, 2006.
[20]Ceraolo M.New dynamical models of lead-acid batteries[J].IEEE Transactions on Power Systems,2000, 15(4): 1184-1190.
[21]PSCAD/EMTDC Power System Simulation Software User’s Manual[Z].Canada: Manitoba HVDC Research Center, 2005.
