基于匹配濾波技術(shù)的特征信號(hào)提取的仿真和實(shí)現(xiàn)*
2012-08-08 02:31:50劉元廷張建秋湯永新
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2012年2期
李 洋,劉元廷,任 萍,張建秋,湯永新
(安徽理工大學(xué) 理學(xué)院,安徽 淮南232001)
對(duì)于激光測(cè)高系統(tǒng)中的回波信號(hào),我們關(guān)心它出現(xiàn)的時(shí)刻與波形。因此需要設(shè)計(jì)一種“最佳檢測(cè)器”來協(xié)助增強(qiáng)信號(hào)抗噪聲的能力,保證在判別信號(hào)出現(xiàn)時(shí)具有最低的錯(cuò)誤概率。為此需要尋求這樣一種濾波器,它使有用信號(hào)s(t)增強(qiáng),同時(shí)對(duì)噪聲n(t)具有抑制作用。當(dāng)信號(hào)與噪聲同時(shí)進(jìn)入濾波器時(shí),它使信號(hào)成分在某一瞬時(shí)出現(xiàn)峰值,而噪聲成分受到抑制。這種裝置能以最低的錯(cuò)誤概率判斷脈沖s(t)的有無,能完成此功能的濾波器稱為“匹配濾波器”,所謂匹配是指濾波器的性能與信號(hào)s(t)的特性取得某種一致,使濾波器輸出端的信號(hào)瞬時(shí)功率與噪聲平均功率之比最大。
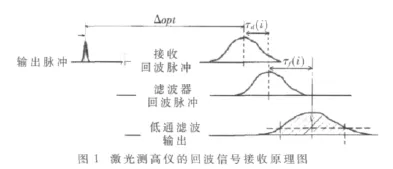
1 激光測(cè)高儀回波信號(hào)的接收原理
激光測(cè)高儀的工作原理是安裝在飛行平臺(tái)上的激光器以固定頻率向探測(cè)空間發(fā)射激光脈沖,激光光束穿越大氣或真空后經(jīng)目標(biāo)散射產(chǎn)生后向散射回波被測(cè)高儀所接收,通過分析該脈沖回波的時(shí)間間隔,可以計(jì)算出測(cè)高儀與探測(cè)目標(biāo)之間的距離[1]。激光測(cè)高儀的回波信號(hào)接收原理圖如圖1所示[2-3]。
對(duì)于激光測(cè)高儀系統(tǒng),準(zhǔn)確地測(cè)出被測(cè)物體的距離僅僅是前提,遠(yuǎn)不能滿足要求。期望獲得的是回波信號(hào)所包含的被測(cè)物體的更多特征信息,如被測(cè)表面的粗糙度、表面傾斜度和反射率等,并通過處理和分析這些數(shù)據(jù)獲得更多、更有用的信息。采用匹配濾波器不僅可以準(zhǔn)確測(cè)出回波時(shí)間,還可以在濾除噪聲的前提下對(duì)信號(hào)有高質(zhì)量的保真。
2 匹配濾波器的設(shè)計(jì)理論[4-5]
設(shè)匹配濾波器的輸入信號(hào)為 s(t)+n(t),其中 s(t)是有用信號(hào)脈沖,n(t)是噪聲;濾波器的輸出信號(hào)為so(t)+no(t),其中 so(t)是有用信號(hào)分量,no(t)是噪聲分量。如圖2所示。

圖2 信號(hào)與噪聲通過濾波器
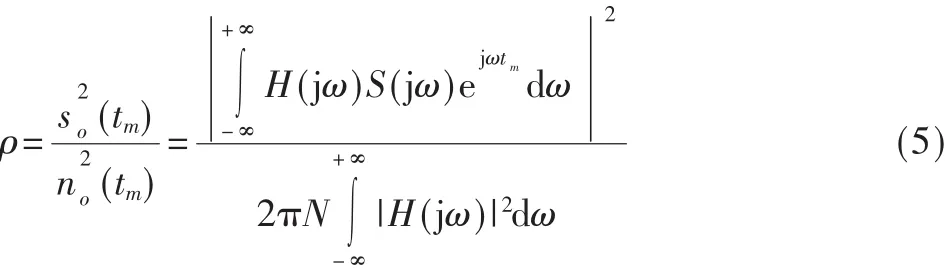
設(shè)濾波器的轉(zhuǎn)移函數(shù)為 H(jω),希望在某一時(shí)刻 t=tm(進(jìn)行判決)使信噪比最大,取(tm)與(tm)之比以 ρ表示:

若 s(t)的傅里葉變換 S(jω)=F[s(t)],則 so(t)可由下式給出:

在t=tm時(shí)刻:

若n(t)為白噪聲,其功率譜為常數(shù)N,輸出噪聲no(t)的功率譜為|H(jω)|2×N,由此求出

聯(lián)立式(1)、式(2)、式(3)可求出:
由柯西-施瓦茨不等式可以給出:
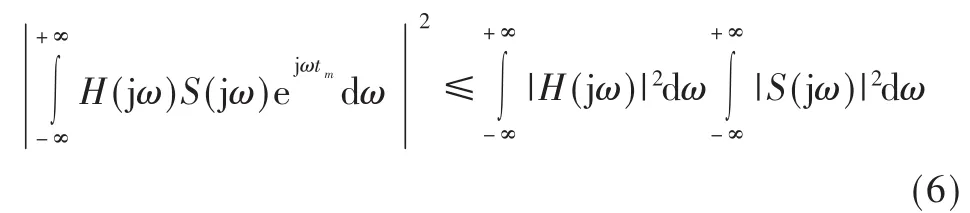
式(6)中等號(hào)僅在滿足以下條件時(shí)成立:

式中k為任意常數(shù)。將式(5)代入式(4)得:

濾波器輸出端信噪比的最大值為:

可得濾波器的沖擊響應(yīng)h(t)為:



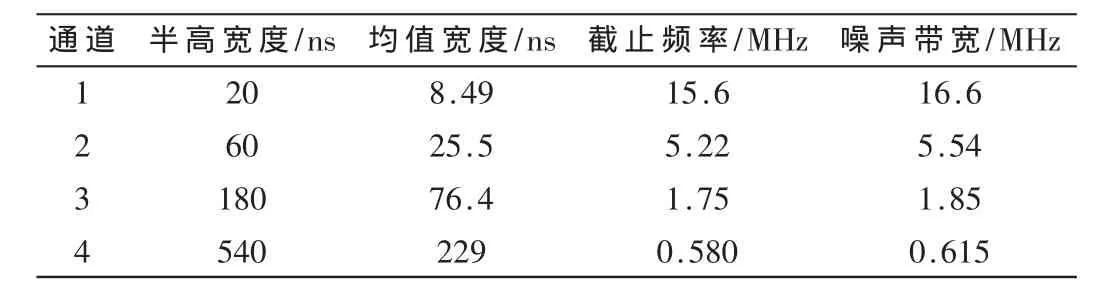
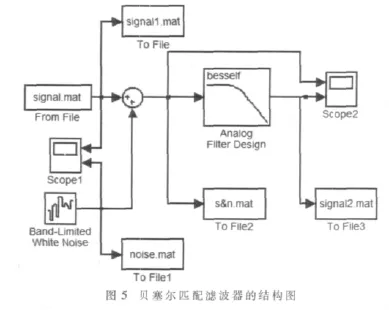
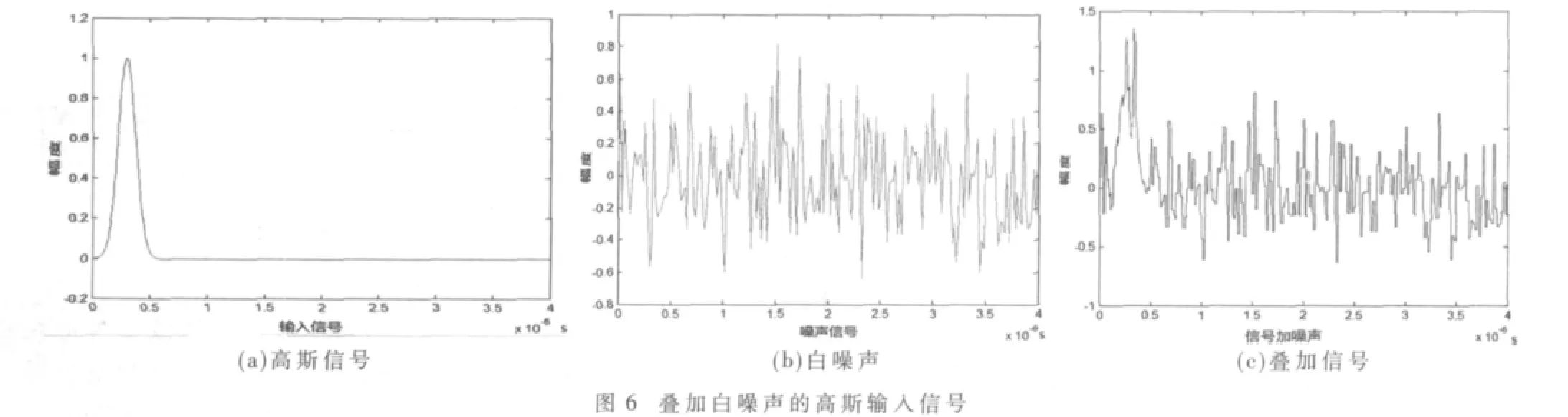
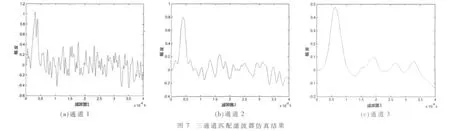
匹配濾波器的波形基本是已知的,且有用信號(hào)s(t)的持續(xù)時(shí)間是有限的。設(shè) s(t)在區(qū)間(0,T)之外為零,如圖3(a)所示。s(tm-t)可由 s(t)沿垂直軸反褶并向右平移tm得到,圖 3(b)~圖 3(e)分別示出了 s(-t)以及 s(tm-t)的三種情況,即 tm 至此得出結(jié)論:匹配濾波器的沖擊響應(yīng)是所需信號(hào)s(t)對(duì)垂直鏡像并向右平移T。這樣的線性系統(tǒng)稱為匹配濾波器或匹配接受器。從改善系統(tǒng)輸出端信噪比的角度考慮,匹配濾波器是線性系統(tǒng)的最佳濾波器。 當(dāng)發(fā)射脈沖信號(hào)為高斯信號(hào)時(shí),匹配濾波器采用具有恒定的群延時(shí)優(yōu)點(diǎn)的貝塞爾濾波器,它給出了匹配濾波器的理論和設(shè)計(jì)方法[6-8]。匹配濾波器的截止頻率是由濾波信號(hào)的半高寬度確定的,但是由于目標(biāo)地面的特征以及大氣傳輸?shù)纫蛩氐挠绊懀す鉁y(cè)高系統(tǒng)的回波信號(hào)半高寬度τ是一個(gè)變量。對(duì)于固定結(jié)構(gòu)的匹配濾波器,τ的變化會(huì)使信號(hào)與濾波器不匹配,則輸出信噪比會(huì)減小,影響回波探測(cè)。為解決這一問題,系統(tǒng)采用多通道接收,在一定程度上提高了濾波器的信噪比。圖4所示為四通道匹配濾波器。 在大量觀測(cè)回波信號(hào)的基礎(chǔ)上,可由回波信號(hào)的統(tǒng)計(jì)特性確定各通道濾波器的指標(biāo)。由于系統(tǒng)的發(fā)射脈沖特性與美國(guó)航天飛機(jī)激光測(cè)高儀(Shuttle Laser Altimeter-02)的發(fā)射信號(hào)特性相同,參考該激光測(cè)高儀各通道濾波器的指標(biāo),給出系統(tǒng)中各通道濾波器的指標(biāo)如表1所 示[2,6]。 SIMULINK為用戶提供了方框圖建模的圖形接口,并提供了功能豐富的模型(Block)庫,使用時(shí)只需從各子庫中取出模型,定義好模型參數(shù),將各模型連接起來,然后設(shè)置系統(tǒng)參數(shù)(如仿真時(shí)間、仿真步長(zhǎng)、計(jì)算方法等),之后運(yùn)行即可。在MATLAB SIMULINK中貝塞爾匹配濾波器仿真的結(jié)構(gòu)圖如圖5所示。 表1 各通道濾波器指標(biāo) 圖5中: (2)Band-Limited White Noise 為白噪聲,由 SIMULINK工具箱提供。 (3)由 MATLAB 工具箱 Signal Processing Blocket提供的Analog Filter Design為貝塞爾低通濾波器,它有兩個(gè)參數(shù),階數(shù)n和截止頻率ω。 (4)Scope1和Scope2為示波器,設(shè)置其分別可同時(shí)顯示兩個(gè)波形,Scope1分別顯示的是有用信號(hào)signal和白噪聲noise的波形。Scope2分別顯示的是信號(hào)與噪聲的疊加s&n和信號(hào)與噪聲疊加后通過濾波器濾波后signal2的波形。 (5)4個(gè) To File是將波形按一定間隔離散取值,取值的最大個(gè)數(shù)可以設(shè)置,最后將取得的數(shù)據(jù)以M文件的形式保存在MATLAB中,以便以后使用。 其中signal1存放的是有用信號(hào),noise存放的是噪聲,s&n存放的是有用信號(hào)和噪聲的疊加信號(hào),signal2存放的是濾波后的信號(hào)。 將上述疊加的信號(hào)分別通過表1中的4個(gè)通道得到濾波后的波形圖,分別如圖7(a)~圖 7(c)所示(此處給出其中三個(gè)通道的波形)。 由圖7可以看出:濾波通道1和通道2濾波器濾出的波形幅度雖然比較大,但信噪比很小,分別為5.8和7.3;而通道3濾波器濾出的波形信噪比為25且波形展寬小,波形保真好。 根據(jù)需求,激光測(cè)高儀要求在500 km的衛(wèi)星軌道高度進(jìn)行對(duì)地測(cè)量時(shí),測(cè)距精度達(dá)到±1 m。因?yàn)閷?shí)驗(yàn)條件的限制,采用消光法模擬500 km的測(cè)程,目標(biāo)物為1.3 km外的靶場(chǎng),在靶場(chǎng)室內(nèi)放置一塊1 m×1 m的漫反射板,漫反射板距離墻壁 3.9 m。圖 8(a)~圖 8(c)給出了測(cè)高信號(hào)分別通過通道1、道2、通道3的回波的信號(hào)值。 從實(shí)驗(yàn)結(jié)果可以看出,信號(hào)通過第三通道時(shí)信號(hào)的標(biāo)準(zhǔn)偏差最小(sd=0.25),仿真的結(jié)果可以看出對(duì)于回波信號(hào)的半高寬度為76.4 ns時(shí),匹配濾波通道3輸出的信號(hào)滿足較高的信噪比,并且保證了信號(hào)波形的保真度,實(shí)現(xiàn)了最佳檢測(cè)。對(duì)于不同的地物特征的回波信號(hào)的半高寬度是不一樣的,因此,對(duì)于激光測(cè)高儀來說,采用多通道匹配濾波器可以提取復(fù)雜地物特征的回波波形。 [1]BUFTON J L.Laser altimetry measurements from aircraftand spacecraft[J].Proceedings of the IEEE,1989,77(3):463-477. [2]ABSHIRE J B,Sun Xiaoli,Afzal R S.Mars orbiter laser altimeter:receiver modeland performance analysis[J].Applied Optics,2000,39(15):2449-2460. [3]PASI P.Integrated electronic and optoelectronic circuits and devices for pulsed time-of-flight laser rangefinding[M].Oulo University Press,2003:1-56. [4]鄭君禮,楊為理,應(yīng)啟珩.信號(hào)與系統(tǒng)[M].北京:高等教育出版社,1983. [5]韓利竹,王華.MATLAB電子仿真與應(yīng)用[M].北京:國(guó)防工業(yè)出版社,2003:187-266. [6]李洋,湯永新,任萍.基于匹配濾波技術(shù)的激光測(cè)高儀電子學(xué)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].電子技術(shù)應(yīng)用,2010,36(6):91-94. [7]李洋,戚俊,趙欣,等.激光測(cè)高儀中匹配濾波器的設(shè)計(jì)[J].激光與光電子學(xué)進(jìn)展,2006,43(4):29-33. [8]孫翠娟,楊衛(wèi)平,沈振康,等.一種基于匹配濾波的紅外小目標(biāo)檢測(cè)系統(tǒng)[J].激光與紅外,2006(2):33-37.
3 SIMULINK仿真



4 實(shí)驗(yàn)與結(jié)論
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
