基于Agent 的分布式網絡化制造系統中的智能數控設備研究
2012-08-16 06:29:26曹長虹姚洪斌黃新春
科技視界 2012年21期
曹長虹 姚洪斌 黃新春
(1.新疆工程學院機械工程系 新疆 烏魯木齊 830091;2.新疆工程學院基礎教學研究部 新疆 烏魯木齊 830091;3.西北工業大學現代設計與集成制造教育部重點實驗室 陜西 西安 710072)
0 引言
智能數控設備由于具有對加工狀態進行識別、依據加工狀態優化加工參數、誤差補償、在線監控等功能,在當今制造業柔性化、敏捷化、智能化和集成化的發展趨勢下越來越廣泛的應用,隨著全球信息化技術的發展,制造業信息化的進程已愈加緊迫,智能數控設備必須具備與外界(如人、其它數控設備或周圍環境等)的相互通信、交流、協調與合作的能力。 目前,在網絡技術發展的前提下,雖然可以通過為每臺智能數控設備引入一個Agent, 由它來負責完成智能數控設備與外界的交互, 任務的具體執行則由智能數控設備完成,從而大大提高了智能數控設備的整體性能。 但是在對于龐大制造系統的分布式制造資源時,就會出現設備信息交互和分配的瓶頸。本文在對數控設備Agent 模型的研究基礎上,基于分布式網絡化制造系統的技術特點,通過對數控設備網絡運行環境、智能STEP-NC 控制器的運行模式和實現方法的研究,從而創新性的建立了基于智能STEP-NC 控制器的支持分布式網絡化制造的智能數控設備。
1 數控設備Agent 模型
數控設備Agent 是一個具有一定推理、 決策能力的智能實體(軟件計算程序),能夠獨立、自主地根據其周圍環境信息、當前狀態能力,進行規劃、推理決策并作出適當的反應。它是數控設備的 “代理人”, 而數控設備則是其所代理的實體。 數控設備Agent 全權負責所代理的智能數控設備與外界的通信交流合作事宜。 通過將數控設備Agent 化,可以有效地降低構成制造系統的復雜程度和各個數控設備間的耦合度,極大地提高制造系統的開放性、可靠性和動態可重組性,為實現制造企業設備級的集成奠定堅實的基礎。
根據對數控設備Agent 的定義和功能要求而建立的數控設備Agent 的模型[1],它主要由通信模塊、協作模塊、任務池、推理決策及控制模塊、知識與數據庫及其管理模塊、人機接口等部分組成。
2 基于多Agent 的智能STEP-NC 控制器
智能STEP-NC 控制器體系結構[2]包括應用服務層、數據層、操作系統層和硬件設備層,其中,系統的核心功能層——應用服務層由14 個不同功能的Agent 組成,具體是解釋Agent、XML(可擴展標記語言)處理器Agent、工藝規劃Agent、刀具路徑規劃Agent、仿真Agent、人機接口Agent、執行Agent、NCK&PLC (數控內核和可編程邏輯控制器)Agent、監控Agent、故障診斷Agent、參數設置管理Agent、決策Agent、檢測Agent 和通信Agent。各功能Agent 模塊之間采用實時軟總線RTCORBA(實時公共對象請求代理體系結構)進行通信,并通過實時操作系統內核擴展和高速實時串行總線,進行數控系統中高實時模塊的控制。
3 基于智能STEP-NC 控制器的分布式智能數控設備
3.1 體系結構
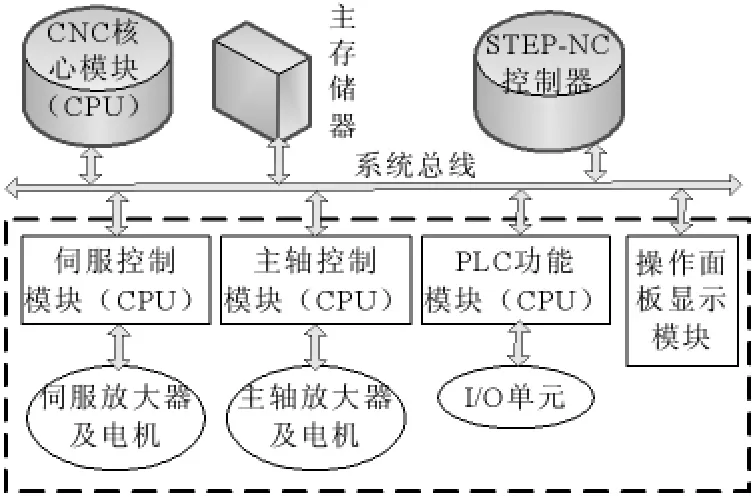
圖1 基于STEP-CN 的智能數控系統的體系結構
為實現智能數控系統的功能特點, 支持分布式網絡化制造的智能數控系統應采用多微處理器、多主總線的體系結構[3]。其體系結構見圖1。 該系統由CNC 核心模塊、智能STEP-NC控制器、主存儲器模塊和傳統功能模塊等組成。 其中,智能STEP-NC 控制器則主要是為提高原有數控系統的智能水平和對外協作能力而新增加的功能模塊,如加工過程智能自適應控制、加工過程監控、誤差補償、加工過程動態仿真以及數控設備Agent 等模塊,智能STEP-NC 控制器采用上文設計的基于多Agent 的智能STEP-NC 控制器。該體系結構的顯著特點是:各功能模塊具有獨立的微處理器,獨立實現各自特定的功能,通過系統總線完成相互間的信息交換。 各功能模塊通過智能STEP-NC 控制器可以有效地以并行、 分布的方式處理各自的任務。
3.2 智能數控設備原型系統
通過在原有數控系統中加入智能STEP-NC 控制器、以此增強原數控系統的功能和提高其智能水平, 同時實現與其他數控設備的通信、協作及資源共享,在此基礎上建立了支持分布式網絡化制造的智能數控原型系統,其體系結構見圖2。
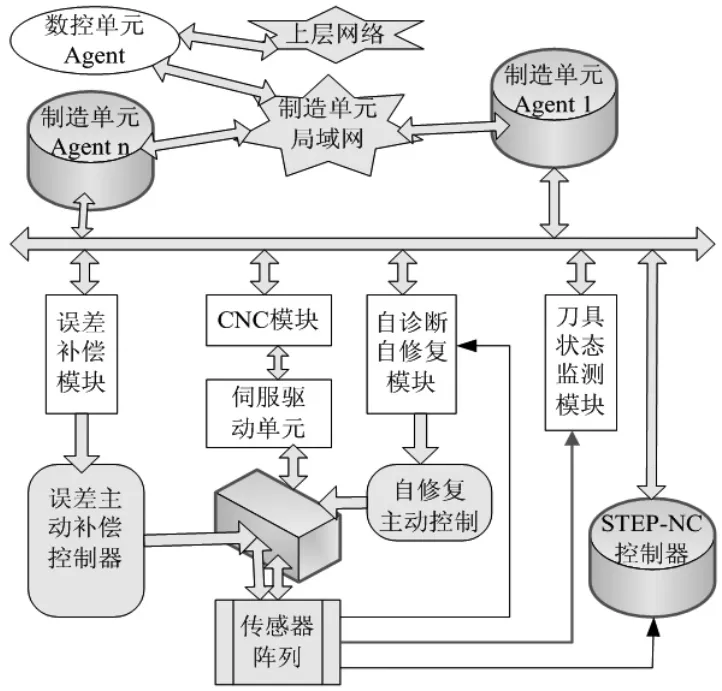
圖2 智能數控原型系統的體系結構
智能STEP-NC 控制器主要負責與數控設備Agent 進行交互,從數控設備Agent 接受NC 程序、控制命令等,將有關機床的狀態信息反饋給數控設備Agent。 在實現中,主要利用數控單元在每l6ms 中斷周期內增加讀寫雙端口RAM (作為內置模塊)或共享內存(作為外置模塊)的程序模塊,或者利用通過通信口(如RS-232 串口)實現與數控設備Agent(作為外置模塊)間信息交互的程序模塊。
以上各功能模塊都采用硬件和軟件相互結合的方式實現。 該原型系統運行穩定可靠,從原理上實現了分布式網絡化制造模式的這一構想;它是一個具有層次性的、開放體系結構的分布式系統, 在用于構造大型復雜系統時可以大大降低系統的復雜度,而且很容易實現系統的擴展和重組,使制造系統具有更大的系統,非常適用于制造環境的各個層次上。
3.3 智能式數控系統分配招標函數的建立
在接收到生產任務后, 任務Agent 首先將任務分解為各個子任務,并就這些子任務向一些或全部單元Agent 招標。收到招標請求的各單元Agent 依據各自當前的加工能力決定是否對這些子任務中的一個或多個投標,若決定投標,則向任務Agent 報出相應價格和加工時間, 任務Agent 收到所有標書后,根據加工成本盡可能小,總通過時間盡可能短的要求,按如下目標函數確定中標者[4]:
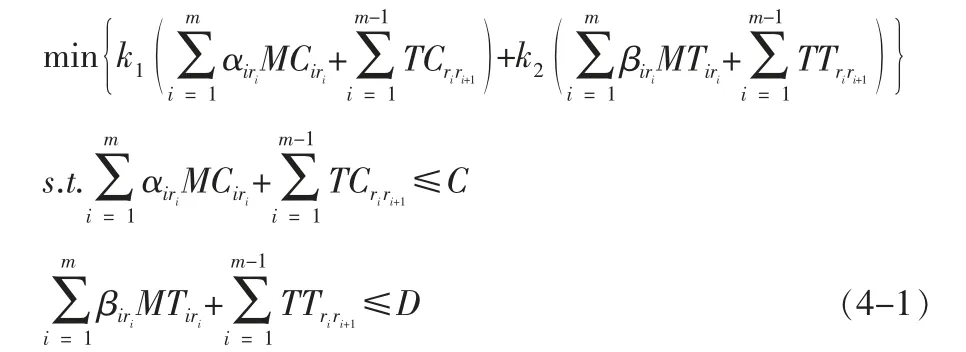
其中,k1,k2為常數, m 為子任務總數,MCir是加工單元ri為子任務i 所報出的加工成本;αiri是任務Agent 指定的加權系數;MTiri是加工單元ri為子任務i 所報出的加工時間;βiri是任務Agent 指定的加權系數;TCriri+1是將工件從單元運到的運輸成本;TTriri+1是相應的運輸時間。 C、D 分別為總任務預估成本及交貨期。
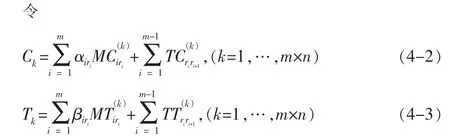
備選加工路線為:Mr1→Mr1→…→Mrm(不考慮各種約束條件,僅從排列組合的角度來看有mn 條加工路線,n 為參與招標的加工單元總數)。


通過遺傳算法對于智能數控設備的任務分配進行優化算法, 我們可以得到基于Agent 數控設備智能分配的方法和機制,在這里,假設車間共有10 臺數控加工設備,分別編號為M1,M2,M3,M4,M5,M6,M7,M8,M9,M10。 其參數加工將在仿真過程中進行說明,通過對其加工速度、加工成本、負載率等參數的假設得出下面的仿真過程。
3.4 分布式智能數控設備的仿真
為實現和驗證所提出的基于智能STEP-NC 控制器的智能數控原型系統, 對基于網絡協作的數控設備Agent 間動態任務分配進行了仿真研究,并定義了兩種不同類型的Agent:①制造單元Agent,負責數控設備Agent 的注冊、信息管理與通信協調。 它本身沒有任何加工能力,僅作為數控設備Agent與上層信息系統聯系的中介,如從客戶接受制造任務,并將該制造任務進行動態分配。 ②數控設備Agent,它對自身的制造資源具有控制力,能被其他數控設備Agent 調用,但它本身不直接與客戶進行交互。 在試驗中有十臺數控設備Agent(見表1), 并在試驗剛開始時每臺數控設備Agent 的負載率均為零。
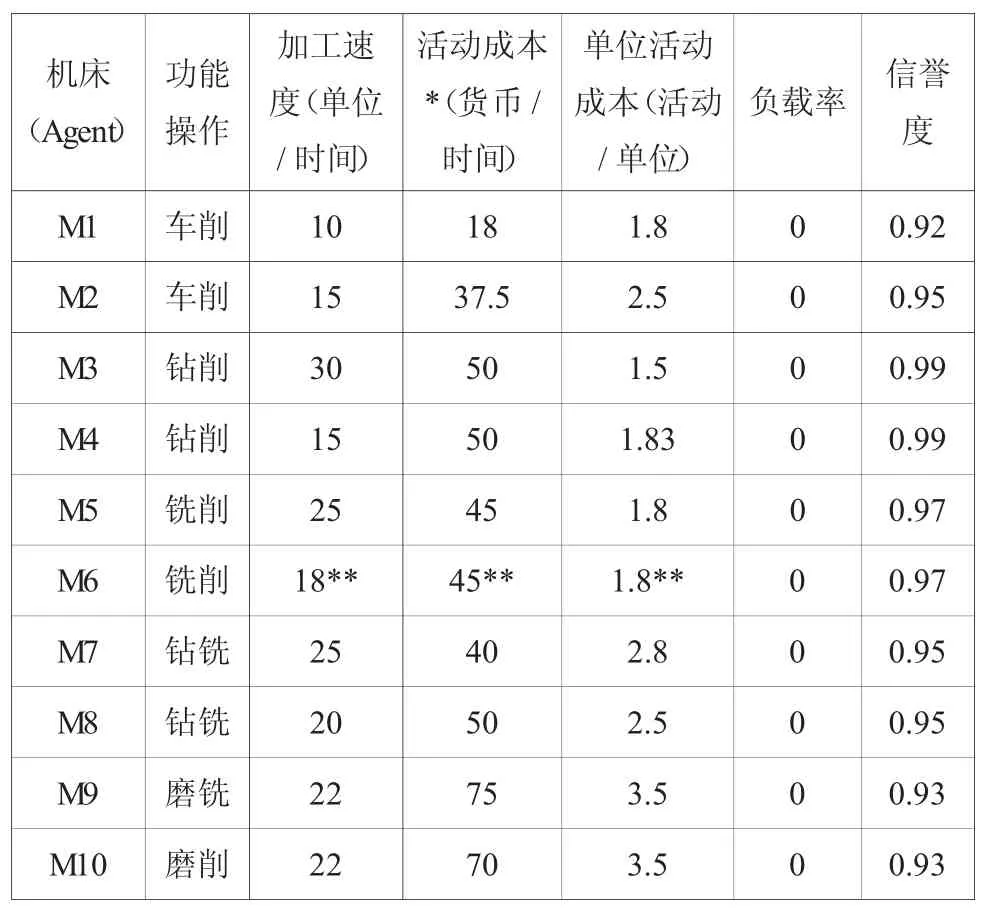
表1 數控設備Agent 參數列表
制造任務(見表2)隨機到達仿真系統,其中20%是緊急的加工任務。
訂單任務通過對于基于智能STEP-NC 控制器的智能數控設備中的Agent 單元仿真技術研究, 同時對于分布式智能數控設備體系功能結構分配招標機制的運算和和任務規劃,從而對于基于智能STEP-NC 控制器的智能數控設備系統按上述的任務分配進行仿真研究。 每個數控設備Agent 能根據私有信息對自身任務進行規劃與調度,基于公有信息對環境的變化作出響應,如將不能按時完成的加工任務基于網絡協作轉移給能完成該任務的數控設備Agent。
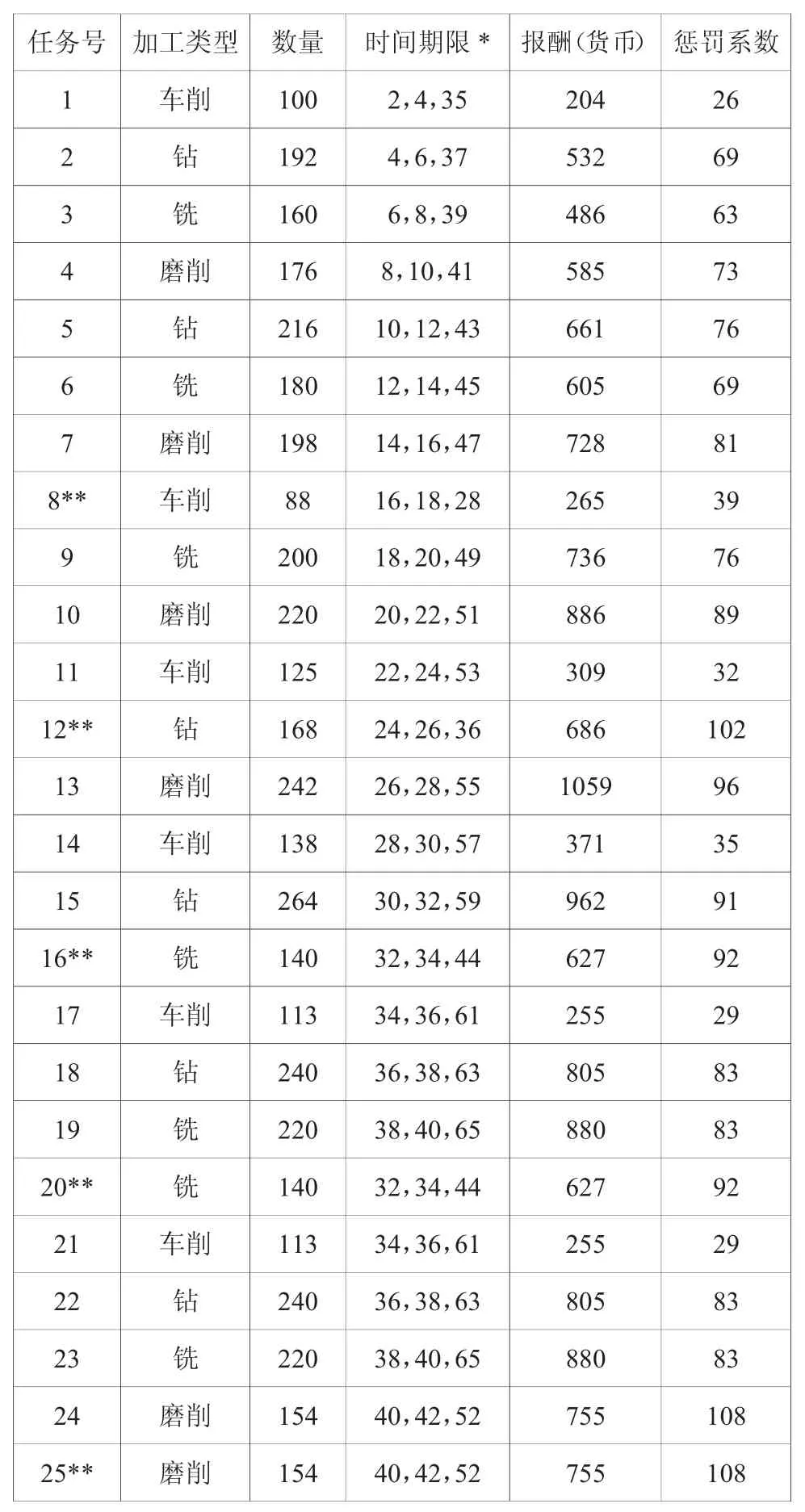
表2 動態任務參數列表
采用基于網絡協作的多Agent 技術進行制造任務的動態分配有如下特點:①制造環境的動態變化很難采用數學建模的方法,分布、自治的Agent 之間的協作有助于降低動態任務分配的復雜度,使得采用優化的調度算法成為可能;②由于每個Agent 對應于制造系統中的制造資源調度過程中發生的沖突可用Agent 之間的協作來解決,在局部優化過程中實現全局的優化目標;③利用制造過程信息,基于協作可以解決制造系統內的制造資源的匹配問題,實現制造資源的集成。
4 結論
本文針對數控設備Agent 模型和基于Agent 智能的STEP-NC 控制器功能和特點分析, 構建了基于智能STEPNC 控制器的分布式智能數控設備體系結構及其原型系統,對基于網絡協作的數控設備Agent 間動態任務分配進行了仿真研究分析了其功能分配機制從而驗證了所提出的基于智能STEP-NC 控制器的智能數控原型系統。
[1]程濤,胡春華,等.分布式網絡化制造系統構想[J].中國機械工程,1999,10:1234-1238.
[2]張潔,高亮,李培根.多Agent 技術在現今制造中的應用[M].北京:科學出版社,2004:300-310.
[3]程濤,吳波,楊叔子,等.支持分布式網絡化制造的智能數控系統的研究[J].中國機械工程,2004,15(8):688-692.
[4]蘭紅波,劉日良,張承瑞.一種智能STEP-NC 控制器系統及其實現方法:中國,200610068498.0,2006-09-10[P].
[5]Lavery P. Demand management: where supply and demand chains converge. Special Supplement to KMWord, 2001, 9:10-14.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
