基于螺旋理論的5-UPS/UPU并聯機床自由度分析
2012-08-16 06:28:48舒宏庭王紅州程洪濤
科技視界 2012年30期
舒宏庭 王紅州 程洪濤
(江西省機械科學研究所 江西 南昌 330002)
0 前言
并聯機構是一種由兩個及以上獨立運動鏈連接動平臺和定平臺,具有2-6 個自由度, 且采用并聯的驅動方式的機構。 與串聯機構相比較,并聯機構具有精度高、結構緊湊、剛度高、承載能力強等優點。 由于并聯機構的諸多優點而引起了眾多學者展開將并聯機構應用于機床的研究。 并聯機床又稱為虛擬軸機床,是一種知識密集型機構,實質上它是現代機器人技術與機床結構技術結合的產物, 其原型是并聯機器人操作機。 與傳統機床相比,并聯機床具有如下優點: 1)剛度重量比大,2)響應速度快。 3)環境適應性強,便于可重組和模塊化設計,且可構成形式多樣的布局和自由度組合。 4)技術附加值高。 可以說,并聯機床被認為是本世紀最具有革命性的機床設計突破,代表了21 世紀機床發展的方向。 雖然并聯機床得到了眾多學者的研究,也獲得了豐碩的研究成果,但由于其相比傳統的機床而言在機構與控制方面相對要復雜的多,受限于并聯機構的應用還不成熟, 并聯機床在我國還沒有成熟的產品進入市場, 目前國內外研究的并聯機床大都集中在三自由度和六自由度的機型上, 而對機床來說要加工復雜的零件最多需要五個自由度就可以完成。 所以,六自由度并聯機構應用在并聯機床上將有一個多余的自由度,這顯然是一種不必要的浪費;而三自由度的并聯機構為完成復雜的任務就必須借助其他兩個自由度的運動, 這將使得并聯機構的優點大打折扣。 因此,研究五自由度的并聯機構應用于機床是非常有意義的。 燕山大學研究了五自由度的并聯機床, 但其機構構型 (5-UPS/PRPU)中的約束支鏈采用了移動副連接方式,這將影響機床的性能。作者提出采用五自由度并聯機構(5-UPS/UPU)應用于并聯機床的構型,并分析其自由度數量與性質,證明本機構適合應用于并聯機床。
1 結構設計
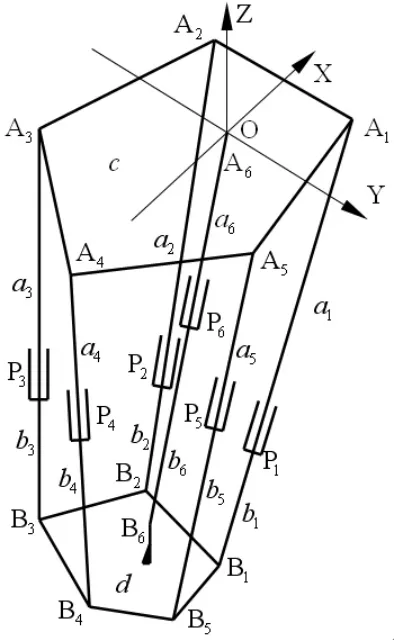
圖1
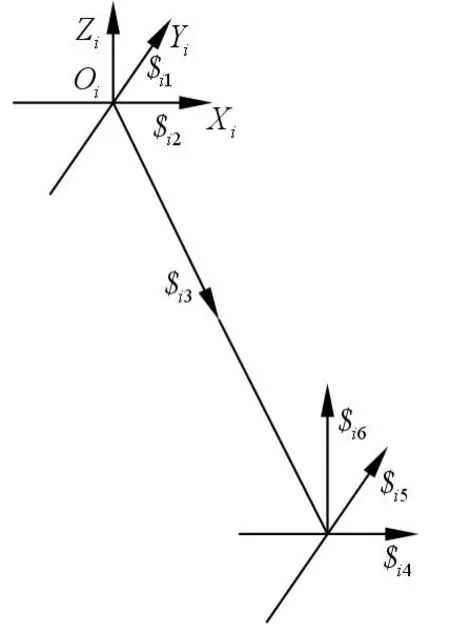
圖2
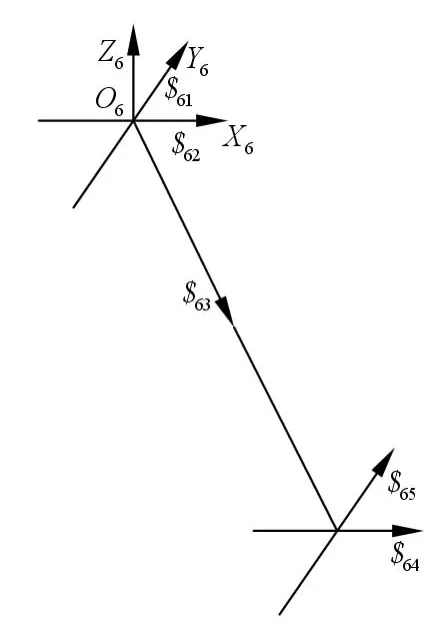
圖3
如圖1 所示,5-UPS/UPU 機構由靜平臺c、動平臺d 與聯接動靜平臺的六條支鏈Li(i=1,2,3,4,5,6)組成,每條支鏈Li(i=1,2,3,4,5,6)由桿ai(i=1,2,3,4,5,6)和桿bi(i=1,2,3,4,5,6)組成,其中Li(i=1,2,3,4,5)為主動支鏈,L6為約束支鏈,ai(i=1,2,3,4,5,6)與bi(i=1,2,3,4,5,6)之間通過移動副pi(i=1,2,3,4,5,6) 聯接, 主動支鏈的一端通過虎克鉸Ai(i=1,2,3,4,5)與靜平臺c 聯接,主動支鏈另一端通過球鉸Bi(i=1,2,3,4,5)與動平臺d 聯接,約束支鏈L6分別通過虎克鉸A6與虎克鉸B6與靜平臺c與動平臺d 聯接。虎克鉸Ai(i=1,2,3,4,5)的幾何中心為第一正五邊形的五個頂點,以第一正五邊形的幾何中心為坐標原點,垂直于虎克鉸Ai(i=1,2)中心連線的方向為X 軸,平行于虎克鉸Ai(i=1,2)中心連線的方向為Y 軸,第一正五邊形所在平面的法向方向為Z 軸建立參考坐標系O-XYZ。
2 自由度分析
由上節可知每條主動支鏈Li(i=1,2,3,4,5)具有相同的結構,建立主動支鏈坐標系Oi-XiYiZi(i=1,2,3,4,5),如圖2 所示,其Xi軸和Yi軸分別與虎克鉸Ai的兩個轉動軸線重合,且Zi軸垂直于Xi、Yi平面,可知球鉸Bi的幾何中心相對于支鏈坐標系的位置為(xi,yi,zi)。
故主動支鏈的運動螺旋系為:

式(2-1)為六系螺旋,不存在反螺旋(即主動支鏈為無約束支鏈)。
建立約束支鏈坐標系O6-X6Y6Z6,如圖3 所示,該坐標系與參考坐標系O-XYZ 重合,且X6軸和Y6軸分別與虎克鉸A6的兩個轉動軸線重合,Z6軸垂直于X6、Y6平面, 可知虎克鉸B6的幾何中心相對于支鏈坐標系的位置為(xi,yi,zi)。
故約束支鏈的運動螺旋系為:

對式(2-2)求反螺旋可得約束支鏈的約束螺旋系的基為

式(2-3)表明約束支鏈對動平臺施加一個約束力偶,該力偶沿Z軸方向。 對整個機構而言,動平臺的約束螺旋系為各支鏈的約束螺旋系的并集,即:

對式(2-4)求反螺旋可得動平臺的運動螺旋系為:
式(2-5)所示運動螺旋系表示5-UPS/UPU 機構動平臺可實現沿X,Y,Z 軸移動與繞X,Y 軸轉動的空間五自由度運動。
3 總結
由以上可知5-UPS/UPU 機構可實現空間五自由度的運動, 具有沿X,Y,Z 軸移動自由度與繞X,Y 軸轉動自由度,理論上該機構安裝電主軸后可實現加工具有任意曲面的工具,5-UPS/UPU 機構適合作為并聯機床的執行機構,具有很高的開發價值。
[1]John J.Craig.機器人學導論:原書第3 版[M].贠超,等.譯.機械工業出版社,2006,6.
[2]黃真,趙永生,趙鐵石.高等空間機構學[M].北京:高等教育出版社,2006.
[3]黃真,劉婧芳,曾達幸.基于約束螺旋理論的機構自由度分析的普遍方法[J].中國科學E 輯:技術科學,2009,39(1):84-93.
[4]于靖軍,劉辛軍,丁希侖,等.機器人機構學的數學基礎[M].北京:機械工業出版社,2008.
[5]李秦川.對稱少自由度并聯機器人型綜合理論及新機型綜合[D].秦皇島:燕山大學,2004.
[6]趙鐵石.空間少自由度并聯機器人機構學分析與綜合的理論研究[D].秦皇島:燕山大學,2000.