沉管隧道管節(jié)浮運操縱運動模擬
2012-08-22 11:05:36季沈華陳錦標(biāo)肖英杰
科技視界 2012年32期
季沈華 陳錦標(biāo) 肖英杰 周 偉
(1.上海海事大學(xué)商船學(xué)院 中國 上海 200135;2.航運仿真技術(shù)教育部工程研究中心 中國 上海 200135)
0 引言
近年來,沉管隧道以其獨特的優(yōu)勢發(fā)展迅猛。管節(jié)的浮運又是整個島隧工程中至關(guān)重要的環(huán)節(jié)。一般來說管節(jié)浮運面臨的幾個重大的瓶頸是管節(jié)尺寸較大、多艘拖輪共同拖航操控較難、施工水域水深有限制、水上交通繁忙、海況復(fù)雜等。管節(jié)浮運操控試驗的研究可以保障浮運過程的安全進(jìn)行,減少人力資源和資金的消耗浪費,對整個工程的建設(shè)有較大的意義。本文主要研究沉管隧道管節(jié)的模型建立和仿真并對模型的誤差進(jìn)行分析。
1 項目背景
本文以港珠澳沉管隧道工程為背景,研究管節(jié)在航道、轉(zhuǎn)向區(qū)、基槽內(nèi)浮運的操控性。港珠澳大橋,跨越珠江口伶仃洋海域,是集路、橋、
島、隧為一體的工程。全長49.968公里,總投資為729.4億(追加至
900億)。港珠澳大橋島隧工程是港珠澳大橋主體工程技術(shù)最復(fù)雜、建設(shè)難度最大的部分。為適應(yīng)沉管隧道各部分管節(jié)順利浮運與沉放,工程預(yù)制兩條浮運航線,現(xiàn)截取其中基槽轉(zhuǎn)向的某一段重點研究。
2 模型建立
基于MMG建模思想,考慮了管節(jié)尺度、拖輪性能、拖帶方式、風(fēng)、浪、流、淺水效應(yīng)等主要因素,建立了一個包含拖船、管節(jié)的三自由度數(shù)學(xué)模型。建模的框架如下圖所示。
由作用在管節(jié)上的外力及外力矩[3]代可以推出以下基本公式:

式中,m 為管節(jié)的質(zhì)量,Izz為轉(zhuǎn)動慣量,[u、v、r]分別為管節(jié)的橫向速度、縱向速度和轉(zhuǎn)艏速率;[XI、YI、NI]分別為作用于管節(jié)的縱向和橫向慣性類水動力和力矩;[XH、YH、NH]分別為作用于管節(jié)的縱向和橫向粘性類水動力和力矩;[XT、YT、NT]分別為拖纜的拖力、橫向力和力矩;[XW、YW、NW]分別為作用于管節(jié)的縱向和橫向風(fēng)力和風(fēng)力矩;
管節(jié)慣性水動力和力矩的計算實際上是對管節(jié)附加質(zhì)量和附加慣性矩的估算,一般采用周昭明的估算公式[1],由于屬于是淺水域[2]的浮運,須對系數(shù)進(jìn)行淺水修正。
在研究管節(jié)浮運的過程中,考慮常速域模型和低速域模型。小漂角采用貴島模型,大漂角采用芳村模型,采用兩種模型相結(jié)合的方法計算粘性力。同樣也須對涉及的系數(shù)進(jìn)行淺水修正。風(fēng)干涉力及力矩采用Isherwood計算。
拖輪力和力矩計算采用先計算單個拖輪的螺旋槳推力和力矩,舵力和力矩在計算單個拖輪的合力和力矩最后得出拖輪組合的合力及力矩。

圖1 某拖輪對管節(jié)的作用圖
設(shè)某全回轉(zhuǎn)式拖輪在某運動狀態(tài)下,航向角為φT左舷導(dǎo)管螺旋槳的偏轉(zhuǎn)角度為δp右舷導(dǎo)管螺旋槳的偏轉(zhuǎn)角度為δs,左右螺旋槳產(chǎn)生的推力分別為Tp、Ts可以由式(2)計算得出:

則計算單個拖輪的螺旋槳推力和力矩之后結(jié)合以上公式(2)的內(nèi)容得出某單個拖輪合力的計算公式:

將浮運過程中涉及到的拖輪分別標(biāo)記為第i號拖輪,則拖輪組合的合力及力矩的計算公式如下:

3 設(shè)計實現(xiàn)
管節(jié)拖航浮運系統(tǒng)包含拖輪控制、航跡顯示、數(shù)據(jù)存儲等模塊,是管節(jié)拖航浮運仿真實驗平臺,能夠獲得航道、轉(zhuǎn)向區(qū)、基槽區(qū)浮運模擬軌跡和實驗數(shù)據(jù),可直觀分析拖船和管節(jié)的拖航運動過程,利用航跡推算,提供航跡預(yù)判功能。在條件允許的情況下,管節(jié)實際拖航過程中,該系統(tǒng)能實時接收現(xiàn)場風(fēng)、浪、流及GPS等數(shù)據(jù),進(jìn)行現(xiàn)場仿真實驗,為拖船的拖力使用和拖帶角度提供科學(xué)依據(jù)。
3.1 系統(tǒng)運行流程
根據(jù)系統(tǒng)框架設(shè)計運行流程,如圖2,主要包括:“信息輸入”、“仿真實驗”、“結(jié)果輸出”三個部分。桌面系統(tǒng)采用ADO技術(shù)綁定后臺數(shù)據(jù)庫,自動采集實驗過程中管節(jié)的經(jīng)緯度、航速等動態(tài)信息和拖輪操作信息存儲到ACCESS數(shù)據(jù)庫中,以便數(shù)據(jù)分析。
“信息輸入”:用戶將設(shè)計的實驗工況信息或?qū)崪y數(shù)據(jù)輸入系統(tǒng),主要包括管節(jié)的初始位置、姿態(tài)和水文氣象信息。桌面系統(tǒng)預(yù)留串口通性接口,用于接入外部實測數(shù)據(jù)。
“仿真試驗”:用戶通過控制拖輪的檔位、拖帶角度和長度等,操縱管節(jié)運動,使管節(jié)的運抵目的地。
“結(jié)果輸出”:仿真實驗結(jié)束后,選擇航跡顯示,可以保存管節(jié)和拖輪航跡,并測量航跡帶寬度。查找復(fù)制ACCESS數(shù)據(jù)庫,保存仿真實驗數(shù)據(jù)。

圖2 系統(tǒng)運行流程
3.2 界面設(shè)計
該系統(tǒng)以電子海圖為背景,用VC++編程的手法嵌入整個拖航系統(tǒng)的模型。下圖為拖航系統(tǒng)的主界面。
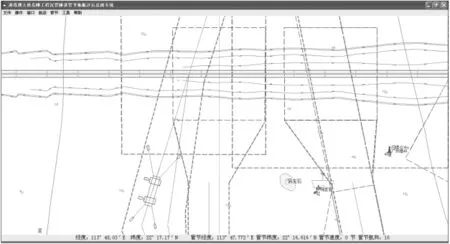
圖3 拖航系統(tǒng)系統(tǒng)的主界面
4 仿真計算及結(jié)果分析
仿真計算所使用的拖船與管節(jié)主尺度見表1,拖船的螺旋槳和舵的主要數(shù)據(jù)見表2。

表1 管節(jié)尺寸

表2 拖輪性能表
主要截取航道轉(zhuǎn)向區(qū)、典型航道、基槽回旋水域進(jìn)行重點試驗來研究整個浮運過程。將工況設(shè)置成以下幾種情況,見表3。

表3 回旋水域分析表

圖4 管節(jié)與拖輪的基槽段向西轉(zhuǎn)向軌跡圖
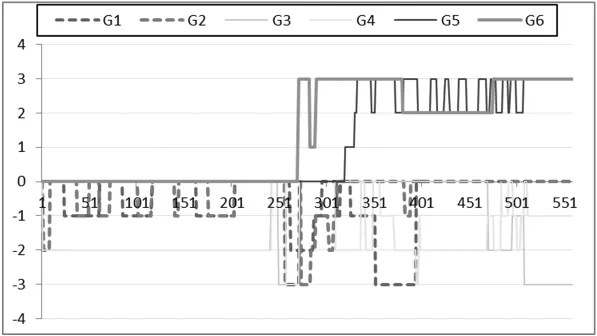
圖5 拖輪的功率使用圖
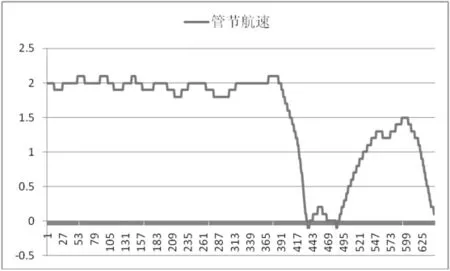
圖6 管節(jié)的航速圖
根據(jù)以上數(shù)據(jù)設(shè)置好管節(jié)和拖輪的參數(shù)[4-8],根據(jù)不同的工況得到管節(jié)和拖輪的航跡圖,圖6是拖航浮運系統(tǒng)在工況風(fēng)向135°,風(fēng)速6級,流向175°,流速1.6節(jié)的航跡圖,圖7拖輪的功率使用圖,圖8是管節(jié)的航速圖。根據(jù)拖輪功率數(shù)據(jù)分析,在風(fēng)流疊加的條件下,基槽回旋水域一往左轉(zhuǎn)向最大拖輪累積功率為3906178kw,拖輪累積功率3570個單位;在風(fēng)流抵消的條件下,基槽回旋水域一往左轉(zhuǎn)向最大拖輪累積功率為2116359kw,拖輪累積功率1859個單位。實際拖航拖輪功率可以參考上述數(shù)據(jù)進(jìn)行拖帶。
由圖6可以看出在轉(zhuǎn)向之前管節(jié)的航速保持在2節(jié)左右,在轉(zhuǎn)向點有一個突變的過程,在實際浮運過程中需注意拖航系統(tǒng)速度的變化速率,以便于控制操縱。
該系統(tǒng)是通過計算機(jī)仿真技術(shù)模擬管節(jié)拖航浮運過程,盡可能模擬真實的情況,但與真實情況有所不同,因此,存在一定的誤差。桌面系統(tǒng)的誤差主要包括:管節(jié)操縱運動模型誤差、拖輪操作誤差、水文氣象信息測量誤差。所以只能盡可能接近地仿真浮運過程。
5 結(jié)論
管節(jié)在復(fù)雜的海況下的運動是一種復(fù)雜的非線性運動,本文結(jié)合外界因素對管節(jié)的影響定量地分析了管節(jié)的運動過程,十分接近地仿真了管節(jié)在典型階段的速度變化趨勢和所需拖輪的功率曲線圖并在系統(tǒng)中得出了管節(jié)運動的航跡帶分布圖[9],對管節(jié)浮運操控提供了理論基礎(chǔ)同時也有助于整個操縱過程的實時模擬。
[1]周昭明,等.多用途貨船的操縱性預(yù)報計算[J].船舶工程,1983,第6期.
[2]A.M.巴辛.淺水船舶流體力學(xué)[M].北京:高等教育出版社,1960.
[3]張曉兔,張樂文,劉祖源.長江沉管隧道管節(jié)的頂推操縱運動模擬[J].武漢造船.1999年,第3期.
[4]梁康樂,鄧德衡,黃國棵.拖航系統(tǒng)操縱運動仿真[J].中國航海.2007年,第2期.
[5]張鵬.拖輪協(xié)助船舶操縱建模與仿真[D].大連海事大學(xué),2008.
[6]張玉喜.鉆井平臺拖帶的建模與仿真[D].大連海事大學(xué),2010.
[7]盛子寅.淺水中船體操縱水動力導(dǎo)數(shù)的計算[J].中國造船,1981(73).
[8]洪碧光.船舶操縱原理與技術(shù)[M].大連:大連海事大學(xué)出版社,2007.
[9]David Clarke.The effect of shallow water on manoeuvring derivatives using conformal mapping[J].Control Engineering Practice 6,1998.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
