無人直升機著艦模擬臺控制系統設計
2012-09-15 05:12:54何劍鐘廖智麟申煥萍
直升機技術 2012年2期
何劍鐘,廖智麟,申煥萍
(中航工業直升機設計研究所,江西景德鎮 333001)
0 引言
無人直升機著艦模擬臺是在著艦試驗中為規避風險而在路基上模擬艦船運動的試驗平臺,它是一種6-DOF(自由度)的 Stewart并聯機構[1]。相比其他6-DOF機構,Stewart機構具有精度高、剛度大、受力合理、速度高、響應快等優點,因此這種機構得到了廣泛關注和研究,并成功用在了多自由度要求的飛行模擬器、船舶艦面模擬器及其他各類大負載的運動模擬。本文針對此種無人直升機著艦模擬臺,進行運動學逆解后,提出一種基于PAC可編程自動控制器的數字PID閉環控制策略,使6個伺服電動缸能同時實現閉環控制,各缸協調運動即可模擬艦船的縱搖、橫搖、振蕩等單項或復合運動。
1 運動學分析
本文所研究的著艦模擬臺機構簡圖如圖1所示,它由上下兩平臺及并聯連接兩者的6根伺服電機驅動桿組成。這6根驅動桿都可以獨立地自由伸縮運動,其兩端分別用虎克絞與上下平臺連接。平臺的姿態是通過對6個伺服電動缸的協調控制來實現搖擺臺上平臺沿空間x、y、z軸的平移和繞各軸的轉動[2]。
在上下平臺分別建立靜坐標系O-xyz與動坐標系O1-x1y1z1,靜平臺各虎克鉸的中心分別為Bi(i=1,2,3…6),動平臺的虎克鉸中心分別為bi(i=1,2,3…6),則它們在各自坐標系中的向量可表示為OBi、O1bi,并設姿態變換矩陣R為
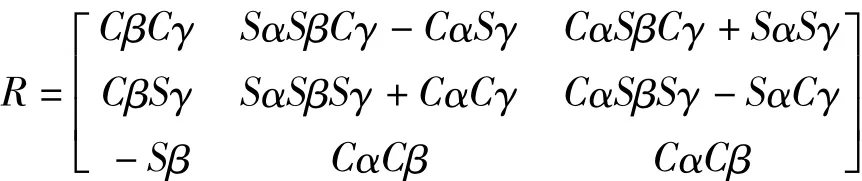
式中的α、β、γ分別是動平臺中心 O1繞 x、y、z軸的旋轉角。由此建立該機構的各支鏈的閉環方程:

其中Li為驅動桿的方向向量,OOi為動平臺參考點O1相對于靜平臺坐標系原點O的位移向量。所謂的機構逆解即指用已知的動平臺位置量和姿態量作為輸入量來求解各驅動桿的位移量,當模擬平臺的位姿為[x y z α β γ]T時,則各支鏈的驅動位移為

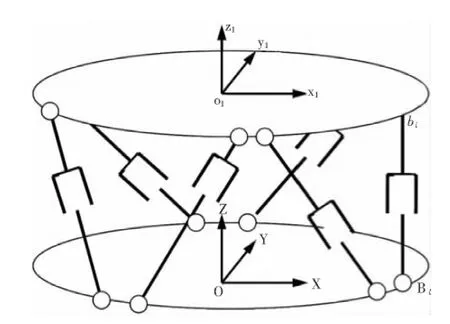
圖1 Stewart機構簡圖
至此,完成機構的逆解分析,即把所要求的模擬臺面的位置和姿態量轉換成6個支桿的位移量,從而實現各伺服缸的位置伺服控制。逆解作為模擬臺運動控制的底層算法,寫入PAC控制器內。
2 控制系統設計
著艦模擬臺控制系統是以一種基于WINCE 5.0的可編程自動化控制器[4]為控制核心,采用PID算法前饋控制與伺服驅動器的位置伺服相結合的閉環控制模式,經CAN總線傳輸至伺服驅動器實施RTS控制。該系統的特點是在嵌入式PAC工控系統進行底層運動算法和PID數字控制算法,結合了IPC高速數據處理傳輸能力和PLC可靠性等優點,利用PAC的CAN總線耦合器進行快速的DA轉換,實現對6個伺服電動缸位置的模擬量控制。相比專用運動控制卡結合驅動器的控制策略,此種解決方案不僅節省了成本,而且提高了開發效率及控制的可靠性。
2.1 控制系統原理
圖2所示為控制系統的原理簡圖,以PAC作為運動控制核心,運用梯形圖或各種其他高級編程語言,將運動算法、離線軌跡規劃、控制模式和邏輯定義通過PAC提供的Modbus TCP協議下的函數接口寫入PAC底層軟件,PAC將解耦的各缸位置數字量通過CAN總線分別傳送給2個擴展的模擬量DA模塊(4通道的I8024),轉換后各通道的模擬量通過驅動器對6缸進行同步與協調控制,使平臺平穩地實現艦船的縱搖、橫搖、振蕩等運動效果。為了提高系統的安全性,系統用垂直陀螺和位球柵尺測量平臺的位移和姿態,通過擴展的隔離開關量輸入模塊I8040W32反饋PAC,然后通過串口或網線傳輸給觸摸屏、監控PC和無人直升機飛行控制系統,進行監控或著艦時機判斷。
運動平臺的6臺伺服電動缸為相對獨立的伺服控制回路,每一回路包括伺服電動缸、伺服驅動器、編碼器、A/D模塊、I/O模塊和控制器PAC,構成快速高精度數字閉環控制系統,如圖2所示。在每一回路中,伺服缸的計算機伺服控制是一種離散化的采樣控制技術,即將連續的伺服缸位移指令信號按一定的采樣周期離散化,在每一個指令周期內,將缸的位置指令信號視作常量,由伺服控制算法、D/A及A/D轉換器、伺服驅動器和伺服電動缸構成的伺服控制回路在一個指令周期內實現:
1)根據位置傳感器反饋信號與指令信號比較,計算出差值;
2)控制器的數字控制算法根據該差值計算出對于伺服缸的驅動信號;
3)該信號經D/A轉換和脈沖轉換后發給伺服驅動器,經功率放大器放大后驅動電動缸運動,并控制位移量和運動方向。
在一個指令周期內進行采樣、比較、運算、功放、驅動、缸運動,再采樣,再比較,反復迭代后形成了閉環反饋控制。該種閉環控制的周期要比指令周期小得多。因此,在一個指令周期中,通過高速反復的閉環迭代,使伺服缸最終到達指令位置,然后再進入下一個指令周期,對下一個階躍信號進行閉環控制,從而使伺服缸實現預定規律的運動。
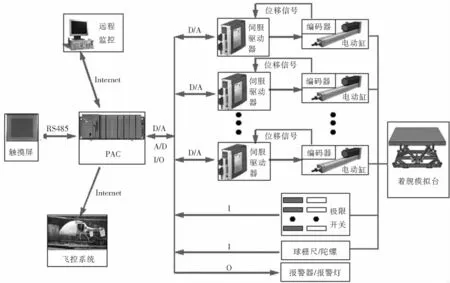
圖2 控制系統原理圖
2.2 控制律設計
各伺服缸的控制系統采用基于數字PID控制律的位置閉環控制策略。PID控制是現今應用最廣泛、最成熟的控制算法,可用位置信號的積分和微分實現各缸位置的精確控制[3]。
PID控制就是首先將底層軟件運算得到的控制指令與電動缸編碼器反饋的實際位置響應進行比較,得出偏差e(t),然后對偏差的比例ke(t),偏差的積分進行控制,將u(t)作為輸入量,從而糾正偏差,如圖3所示。

圖3 單個伺服電動缸的閉環控制原理圖

其中,圖2中的r(t)為給定量,式中kp為比例系數,Kpl/Ti為積分系數,KPTD為微分系數。在PAC控制器中,使用的是數字PID控制律,就是對上式離散化。離散時,令
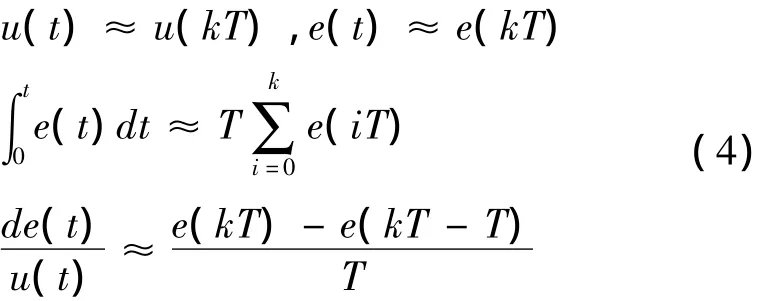
式中,T為采樣周期,當T足夠小時,就保證了模型離散化的精度。于是,離散化的PID控制律為:

2.3 控制軟件設計
著艦模擬臺監控軟件總體結構如圖4所示,各模塊功能介紹如下:
1)通信模塊:通過CAN總線實現對數字量和模擬量信號的輸入和輸出;
2)運動控制模塊:運動逆解算法、軌跡規劃、運動模式、運行邏輯等;
3)電動缸驅動模塊:PID算法、數據緩存處理、脈沖轉換、軟件限位等;
4)電動缸測試模塊:對電動缸進行在線測試和調試;
5)人機對話模塊:通過人機界面(如圖5所示),用戶可設置著艦模擬臺的運動參數、工作狀態和運行參數;
6)故障診斷報警模塊:主要負責開機設備自檢、設備狀態監測及故障報警。
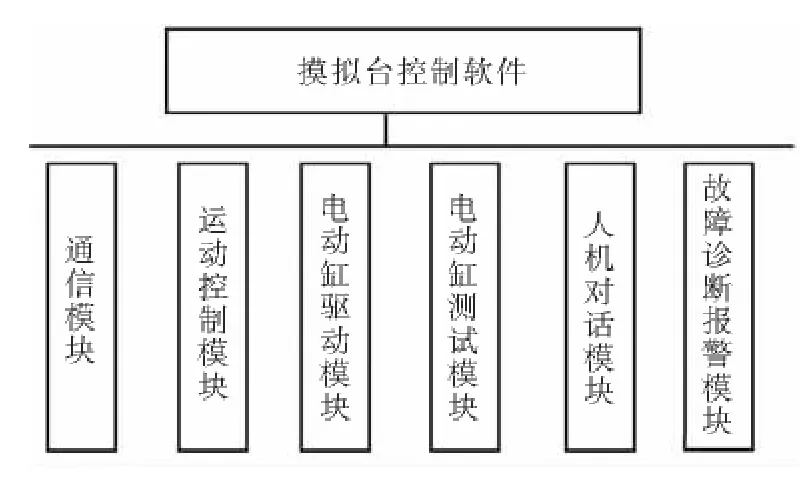
圖4 軟件總體結構圖
3 結束語
本文所設計的無人直升機著艦模擬臺控制系統,充分利用了PAC可編程自動控制器的多函數接口、高速數據處理傳輸能力和高可靠性等優點,為6個伺服電動缸的實時運動控制提供了一個性價比更高的設計開發平臺。在某型無人直升機的著艦試驗中,驗證了該系統具有良好的實時控制能力和運動穩定性,達到了±0.01m的位置控制精度,實現了預期的模擬效果,圖6所示為著艦模擬臺實物圖及模擬4級海況下模擬臺臺面橫搖、縱搖的運行曲線。

圖5 監控界面
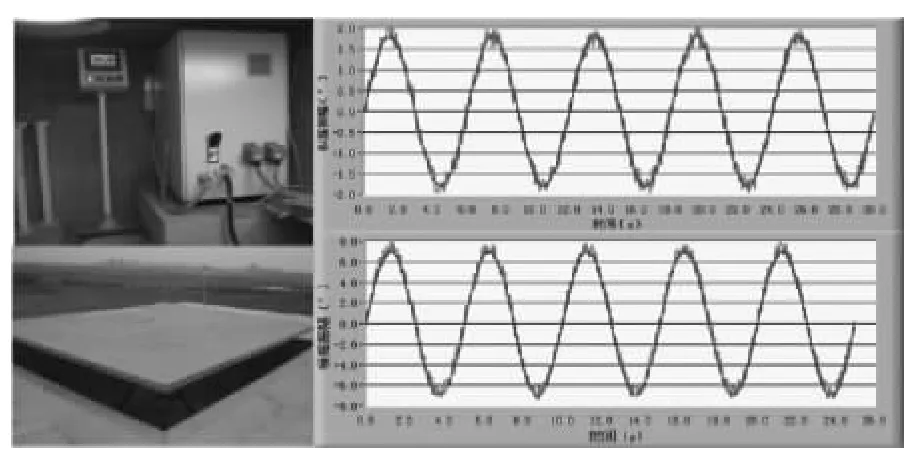
圖6 著艦模擬臺及模擬縱搖和橫搖正弦圖
[1]STEWART DA.Platform with six degree of freedom[J].Proc.On institution of Mechanical Engineering,1965,18(1):371-386.
[2]郝軼寧.并聯六自由度電液伺服搖擺臺的控制研究[D].北京:北京理工大學,2003.
[3]陶水華,葛蘆生.新型PID控制及其應用[M].北京:機械工業出版社,1998.
[4]劉素一.基于Wincon8000的機械高壓液壓設備測試系統的研制[J].武漢:武漢科技學院學報,2010.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
西安航空學院學報(2014年5期)2014-07-13 01:27:52
