一種新型空間構架式伸展臂的仿真與分析
2012-09-15 07:20:32汪俊亮謝溪凌陳定方
湖北工業大學學報 2012年4期
孫 科,汪俊亮,謝溪凌,陳定方
(武漢理工大學智能制造和控制研究所,湖北 武漢430063)
隨著航天事業的發展,空間可展開支撐臂在航空領域的應用得到了普遍關注.空間可展開式支撐臂分為可存儲管狀伸展桿式支撐臂、伸縮套筒式支撐臂、充氣剛化式支撐臂、整體張拉式支撐臂、構架式空間可展開支撐臂等5類,其中構架式空間可展開支撐臂具有收攏率小、承載能力強等優點,更能適應大尺寸和高強度的航天器發展趨向,是目前最為先進的可展開式支撐臂之一[1].
1 新型剛化原理
1.1 常見鉸接式伸展臂的剛化原理
鉸接式伸展臂由橫向框架和縱向連接梁組成,兩橫向框架之間由柔性鋼索連接.當伸展臂伸展到位之后,鋼索處于拉伸狀態,產生預緊力,整個單元剛化,單元之間疊加之后連接于空間飛行器使整個鉸接式伸展臂處于超靜定狀態.
目前,索桿式剛化方式是鉸接式伸展臂的常見方式[2].柔性鋼索一般由兩條定長鋼、一條連續鋼索組成.定長鋼索連接對角鎖定裝置和橫架處的鉸點,連續鋼索上固定一鋼球.在伸展臂的伸展過程中,連續鋼索拉動,鋼球進入對角鎖定裝置的彈性卡槽內鎖定.此時定長鋼索和連續鋼索都處于繃緊狀態,產生預緊力,伸展臂處于超靜定狀態.
該方案采用的鋼絲鎖具有一定的柔性,易出現鋼絲索纏繞、斷裂現象,在航天器的工作環境中可靠性較差.
1.2 新型剛化處理
新型伸展臂整體圖和局部圖如圖1所示.本文采用兩個旋轉副來代替球鉸.縱梁和橫架之間由一齒輪軸體連接,該齒輪軸嵌與橫架之中,可繞中心軸轉動,其和縱梁由一鉸接相連.通過運動分析可知,鉸接式盤壓桿通過橫架的旋轉來實現伸展和壓縮,而橫架的旋轉運動必然帶來縱梁的扭轉,縱梁的扭轉又會促使齒輪軸進行旋轉.通過每層齒輪軸實現聯動,控制一端單元的橫架轉動可實現整體鉸接式伸展臂的伸展運動.

圖1 新型伸展臂整體和局部圖
本文所采用的新型構架式伸展臂采用兩個旋轉自由度代替球鉸的傳動方式,避免了球鉸帶來的不可靠性.伸展臂采用齒輪傳動實現每個單元的連動,控制末端單元的伸展狀態即可輕松實現伸展臂整體的變化.齒輪傳動不完全齒的限位功能可以實現伸展臂極限角度控制,確保系統工作的安全性.新型鉸接接頭見圖2.

圖2 新型鉸接接頭圖
本結構采用剛體實現鉸接式伸展臂的伸展控制,采用齒輪軸實現伸展聯動,在航天環境中具有較強的可靠性.
2 新型盤壓桿仿真分析
根據本文提出的新型剛化原理,采用Adams軟件[3]對該構架式伸展臂的伸展原理進行動力學仿真驗證.
首先在Solidworks軟件中建立該構架式伸展臂的3d模型,然后通過軟件接口導入動力學軟件Adams中,對構架式伸展臂的運動特性進行分析.
在Adams環境下定義部件和運動副,然后對伸展臂收縮運動進行仿真,其具體環境和變量定義見圖3.從圖中可以看到伸展臂的鉸接點的運動軌線呈一螺旋線性,驗證伸展臂通過旋轉橫架來實現壓縮的運動特性.

圖3 ADAMS鉸接接頭運動軌線圖
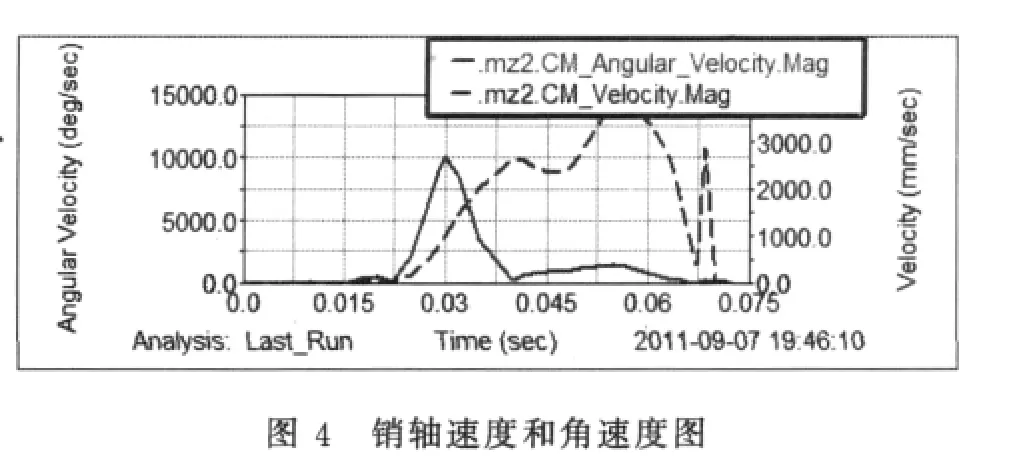
在伸展臂收縮的過程中,其鉸接位置銷軸的速度和角速度如圖4所示.在其運動過程中角速度和速度都存在一定的突變,說明在整個運動過程中存在著一定的沖擊.在伸展過程中銷軸的運動軌線為螺旋曲線,其旋轉角接近90°,高度為伸展臂單元伸展長度.其加速度和位置曲線見圖5.

3 模態分析
通過模態分析可以得到伸展臂的自然頻率及其振型.由于盤壓桿機構工作在低頻環境下,故選取模態分析的頻段為0~50Hz.通過solidworks軟件計算[4],在該頻段內(3單元系統),系統前4階模態見圖6.
第一階模態(頻率為1.1961Hz)為末端單元相對首段單元橫向移動模態.單元齒輪間隙晃動所激發.
第二階模態(頻率為7.2826Hz)為軸向伸縮模態.每單元軸向縱梁伸縮引起了較大的位移.
第三階模態(頻率為16.276Hz)為單元扭轉模態.伸展臂每單元橫架之間存在一定的扭轉,從而出現一定變形.
第四階模態(頻率為16.701Hz)為橫架竄動模態.伸展臂橫架和齒輪間存在一定的竄動,會在伸展臂末端產生較大的位移,這是模態激發的原因.
通過模態分析可知,齒輪軸的間隙對整體震動影響較大,在設計制造過程中要嚴格保證其精度.
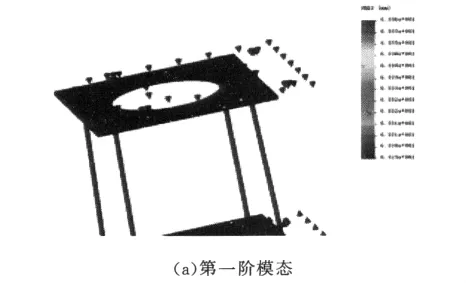

圖6 前四階系統模態振型
4 結束語
與傳統伸展臂對比,該新型伸展臂具有以下優勢:
1)采用兩旋轉自由度替代了了傳統球鉸,傳動可靠,控制簡單,制造方便;
2)設計齒輪軸實現聯動和剛化鎖緊,替代了原有索桿式剛化,伸展可靠,驅動簡單.
綜合來看,該新型伸展臂在伸展可靠性、控制難度上都有所提高,并能夠實現原伸展臂的伸展運動特性.
[1]郭宏偉,劉榮強,鄧宗全.空間索桿鉸接式伸展臂性能參數分析與設計[J].北京航空航天大學學報.2008,34(10):1 186-1 190.
[2]蘇 斌,關富玲.索桿式伸展臂的驅動展開設計與動力學分析[J].空間科學學報,2004,24(4):312-320.
[3]邱海飛.基于ADAMS的四連桿打緯機構動態設計與仿真[J].機械傳動.2011,36(7):52-55.
[4]陳超祥,葉修梓.Solidworks高級教程簡編[M].北京:機械工業出版社,2010.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
計算物理(2014年2期)2014-03-11 17:01:39
終身教育研究(2014年5期)2014-02-28 01:23:06
