基于PLC自動重合閘裝置的設計
2012-09-19 03:44:52符特宋福杰盛華軍
常州工學院學報 2012年6期
符特 宋福杰 盛華軍
(羅定職業技術學院,廣東 羅定 527200)
0 引言
大多數電力系統故障基本都是輸送電線路產生的相關故障,由于這種故障的瞬時性,所以,當故障出現后就會造成線路斷開,此時只要在故障排除后,將斷路器進行重新合閘就能夠實現可靠性的供電。換句話說,也就是由于電力系統中產生類似瞬時性的故障,同時能夠實現自己消除,繼而使繼電器的保護裝置產生相應的動作,斷路器通過自動重合閘裝置實現自動合閘,減少了沒有必要的停電,保證了電力系統的穩定工作。由此可以看出,重合閘成功與否決定于能否實現可靠的工作。傳統的重合閘裝置都是基于電磁式的控制,而本設計采用PLC控制實現自動化重合閘,這類重合閘具有很強的抗干擾能力、高可靠性及強擴展能力等。
1 電磁式控制的重合閘裝置
電磁式控制的重合閘裝置的工作過程是連續性的,動作完成的過程中任何一級動作出現故障,如,繼電器出現動作拒絕、錯誤、卡住、熔焊時造成粘連現象和氧化等,針對其中的任意一個觸點,繼電器從開始啟動后,由于某一級的原因使重合閘完成動作的信號無法發出,也就無法實現重合閘的功能。這種通過每級聯動的控制方式大大降低了電力系統工作的可靠性。具體的多級工作過程如圖1所示。
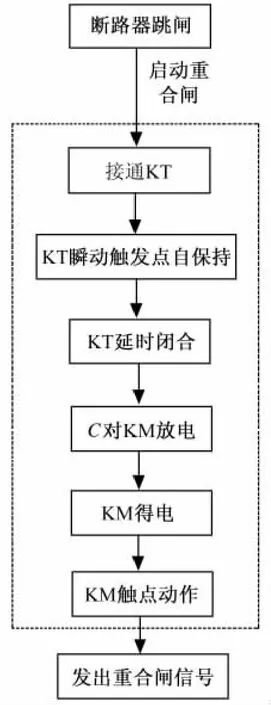
圖1 多級工作過程
電磁式控制重合閘的內部電路中的HL是信號燈,它的主要任務是對自動重合閘裝置的工作準備正常與否,以及中間繼電器的觸點KM完好與否進行監視。對電容C正常充電,信號燈HL繼而點亮。重合閘的工作過程是:KM觸點中的KM1、KM2、KM3、KM4常開觸點如果被粘連住,相應的KM4常閉觸點即斷開,信號燈HL則熄滅。具體電路如圖2所示。通過此監視過程可以看出,整個電路存在著較大的局限性,如果不能及時發現信號燈HL的變化,線路一旦發生相應的瞬時自消性的故障,那么自動重合閘裝置就失去作用。
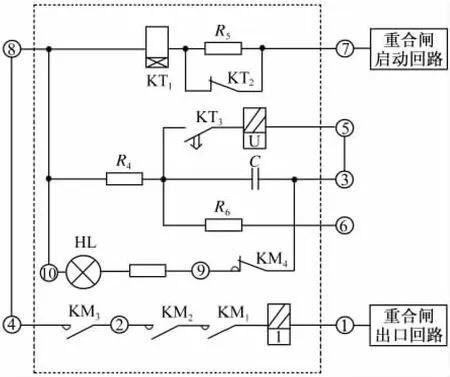
圖2 重合閘內部繼電器原理圖
除此之外,由于電磁式控制重合閘裝置只有多個繼電器協同作用時,才能實現重合閘的功能,因此必須進行大量的導線連接,由此也增加了故障率,同時,由于大量的導線連接,加大了機器的調試與檢修難度,不利于自動控制的實現。而且,這種傳統的電磁方式控制的重合閘裝置的功能又比較單一,擴展相應的控制功能比較困難。
2 重合閘自動化的PLC控制
2.1 設計思想
PLC控制器,由于其優良的性能,在條件惡劣的環境下能夠可靠地工作,平均無故障時間可以達到5×104h以上。實現PLC的重合閘自動化控制,可利用已經過定義的各種內部輔助性的繼電器對傳統機械式的觸點繼電器進行替代,再加以軟件的編程控制,實現硬件實際連接的邏輯關系替代,根本上完成相應動作的物理連接的簡化。即當啟動繼電器相應保護性動作后,重合閘完成動作的信號只需經過PLC的邏輯性處理即可發出,觸點在動作過程中不參與。由此,解決了傳統的機械式的觸點繼電器的很多弊端,控制圖如圖3所示。

圖3 PLC自動化控制框圖
2.2 硬件設計
為了對PLC中輸出的觸點進行保護,只有借助于大功率的KA1和KA2微型繼電器完成相應的合閘和分閘的信號轉換,才能與斷路器中的相應功能(合/分閘)的線圈進行連接。由于繼電器KA1和KA2的線圈都是感性負載,故而分別并聯一個二極管實現續流,以減少切換過程中的電磁干擾。采用UPS供電保證PLC安全工作,同時也可以更好地隔離一些干擾。利用PLC實現控制之后,只需要將合閘繼電器和分閘繼電器中的相應功能線圈和KA1、KA2繼電器中常開的無源觸點相連接形一控制回路,內部連接圖如圖4所示。利用軟件編程實現自動重合閘及其他的保護性功能,簡化了邏輯關系,整個線路的接線更加簡單,便于維護系統的運行。
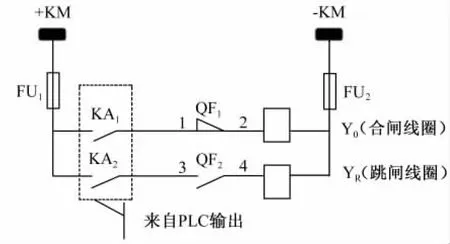
圖4 系統內部接線圖
根據系統控制要求以及需配置的I/O點數的分析,該設計選擇一種超小型的PLC機型,這種機型不需要任何電纜的連接就可以對系統進行擴展。為便于相關工藝的更改或增加相應的控制功能,以及故障的維修,因此在確定具體的I/O點數時必須留有20%的備用量,以保證其擴展能力,具體連接圖如圖5所示。系統故障信號常規的接線方法有:一是通過并聯的方式只使用了一個PLC的輸入點;二是故障信號和I/O點一一對應。通過對接線方法分析可知,后者雖然達不到前者資源的節省,但卻有利于實現報警的組態畫面的顯示。基于此,該設計選用第二種接線方法。
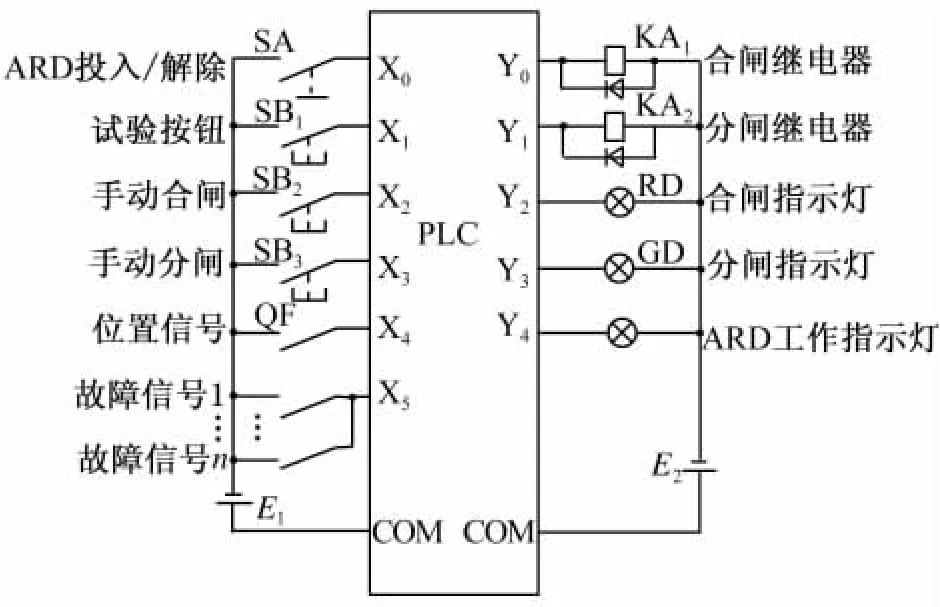
圖5 I/O接線分配圖
2.3 軟件設計
利用PLC的控制方式實現重合閘的自動化功能,不僅可以實現傳統的電磁式控制重合閘的所有的功能,還實現了靈活控制以及延時的高精度,完成的主要功能有:
1)重合閘完成相應的功能動作后,程序會進行自動返回初始化,為下一次的功能動作的完成做準備。
2)對斷路器進行手動斷開的操作或者當線路出現永久性的故障時進行合閘操作,進入鎖定狀態,即自動重合閘相應回路的閉鎖功能。
3)完成重合次數的限制。
4)規定次數的重合閘的功能完成后,相應的功能動作信號不予發出即不完成相同動作。
5)跳閘和防止后加速。
6)按照瞬時自消性故障在線路中出現的性質,可以通過軟件對重合閘動作的準備時間進行任意的延時設定的功能等。
自動跳閘和自動合閘流程圖設計如圖6所示。
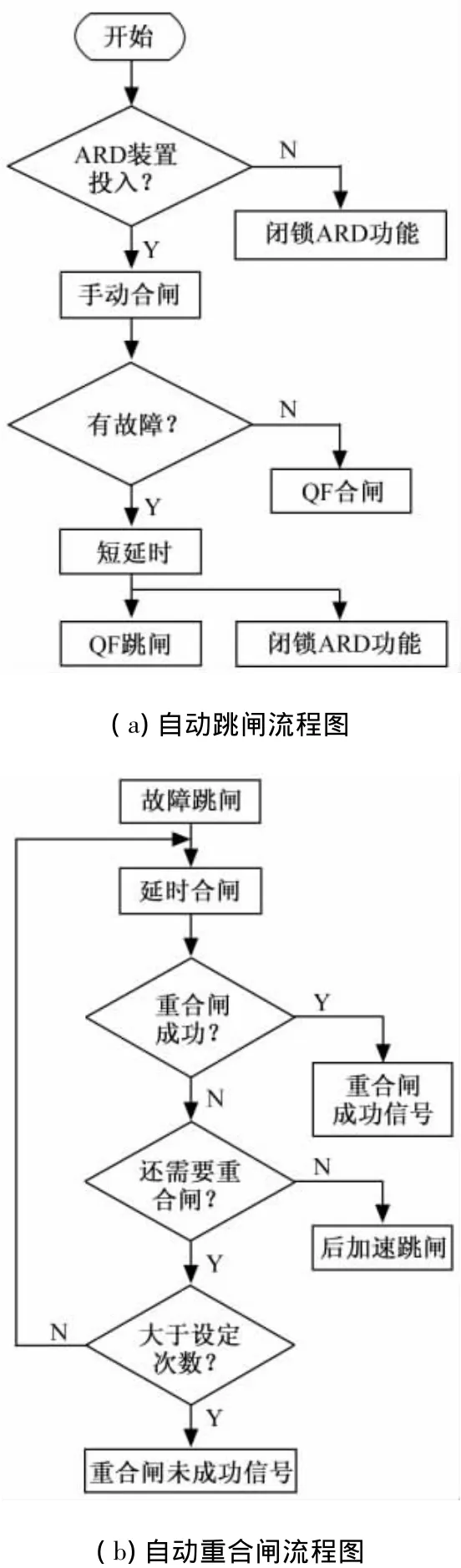
圖6 自動跳閘、重合閘流程圖
由圖6可知,利用PLC的控制方式實現防止跳閘的功能可以通過軟件編程,從而達到替代傳統電磁方式控制的重合閘裝置中KM繼電器的內部自保持回路,并且將繼電器中的兩級防跳措施常開觸點及防跳專用的繼電器進行串聯,即對傳統的電磁方式控制的重合閘的防跳功能的硬件實現措施進行完全替代。傳統的電磁方式控制的重合閘裝置對電容C進行充電需15~25 s,相應地,該時間即為重合閘進行動作準備的時間,在進行時間延時的程序編程時通過時間指令實現,基于線路出現具體的瞬時自消性故障的性質,通過軟件對時間間隔的K值進行簡單的任意性修改,RC回路中的元器件的參數不會對修改造成影響。延時自動重合閘動作的啟動時間也可以進行軟件設定,同樣能夠克服出現于鐘表機構的停走的弊端。PLC實現的控制可以實現簡單化的時間變更和高延時精度,精度最高可以達到0.001 s。
另外,由于傳統的過電流保護中存在時間的限制,只要出現一次永久性的故障,就會造成故障時間的延續,進一步加劇危害。因此,必須實現故障時間的縮短。利用PLC的控制方式進行軟件的編程設計,可以對自動重合閘進行后加速,主要是跳過執行延時定時器的程序段或者對延時定時器進行相應的更改,縮短延時時間,完成跳閘功能回路的直接接通,可加快故障切除速度,使危害程度降至最小。
對于完成自動重合閘實現重合功能次數的規定,可以通過計數器指令在梯形圖中進行設計,如果規定次數N=1,則表示自動重合閘實現一次自動重合的功能。利用這樣的編寫設計保證程序控制功能的通用性。如果重合閘無法自動重合,并且已經完成了規定的重合次數,此時程序則會通過內部繼電器及計數器對重合功能的程序段進行閉鎖,重合閘功能停止。
3 結語
基于PLC的自動重合閘裝置,實現硬件使用最少化及接線最簡化,克服了傳統的電磁方式控制的重合閘裝置中復雜的接線及多動作級數等諸多弊病,提高了系統工作的可靠性。在軟件設計上,保證傳統電磁方式控制的重合閘裝置功能的N次重合,即使需要增加新的控制功能,也不必對PLC設備進行硬件上的改變,只要完成對I/O點數的相應增加,再對程序進行改編便可以實現過壓、過流等保護功能。而且還可以進行功能上的再擴展和開發,提高了系統的控制能力的實現和操作的靈活性,使系統更加實用與通用,自動化程度更高。
[1]張保會,尹項根.電路系統繼電保護[M].北京:中國電力出版社,2005.
[2]黃偉兵.自動重合閘最優重合方案的設計[J].寧夏電力,2008(S1):83-92.
[3]牛建華,王任遠.自動重合閘(ZCH)與繼電保護配合技術研究[J].機電產品開發與創新,2007(5):64 -72.
[4]董惠勤,陸魁軍.跨安全網閘的內外網數據庫同步的實現[J].科技通報,2007(2):266-270.
[5]俞鴻斌.龍門刨銑床PLC控制系統改造和優化[J].科技通報,2008(4):516-521.
[6]葛耀崢,金波,陶國良,等.家具力學性能試驗機PLC順序控制器設計方法[J].科技通報,2000(6):462-467.
[7]趙華軍.PLC在自動重合閘控制中的應用[J].工業控制計算機,2008(7):70-71.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
中國科技論壇(2017年7期)2017-07-25 08:49:53
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
汽車維護與修理(2016年10期)2016-07-10 08:17:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
