柔性制造環境下AGV車輛規模仿真優化研究*
2012-09-25 07:51:52陶翼飛陳君若劉美紅傅亞力
武漢理工大學學報(交通科學與工程版) 2012年5期
陶翼飛 陳君若 劉美紅 傅亞力
(昆明理工大學機電工程學院1) 昆明 650093) (昆船設計研究院2) 昆明 650051)
0 引 言
自動導向小車 (automatic guided vehicle,AGV)系統以其自動裝卸載能力,靈活的路徑選擇,容易改變路徑和控制成為柔性制造系統(flexible manufacturing system,FMS)中物流系統的最佳選擇.通過對AGV系統的靈敏度分析顯示車輛規模是AGV系統各要素中對柔性制造系統影響最大的環節[1].在AGV系統設計的過程中需要確定適當的車輛規模,充足的車輛規模可以及時完成任務,但是從經濟利益考慮AGV不宜過多,同時還會加劇AGV系統的車輛擁堵[2].
目前AGV系統車輛規模研究主要分為3類:(1)確定型,主要用于AGV系統規劃階段,通過建立線性規劃、網絡模型對車輛規模進行求解,這種方法求解較容易,但建立模型往往對實際問題進行了簡化,不容易得到最優解[3];(2)隨機型,如排隊模型,約束條件與實際問題相似,但求解困難[4];(3)仿真型,通過仿真軟件、Petri網等建立AGV系統仿真模型,進行仿真實驗得到最優解,這種方法的優點是模型能夠得到最優解且可靠性高,缺點是建模過程和仿真實驗耗費時間,仿真成本較高[5].
本文提出首先通過經典數學模型對AGV系統車輛規模進行估算,以估算結果確定初始仿真實驗輸入變量取值范圍,對仿真結果進行方差分析,根據分析結果進行優化算法與仿真模型的迭代,最終得到最優解.通過估算模型決定初始仿真實驗的輸入變量,同時在模型求解的過程中融入仿真優化思想,有效提高了求解效率和精度.
1 仿真優化
仿真優化過程描述如下:首先由優化算法產生初始解(決策變量),然后將其輸入仿真模型中,仿真運行結束輸出響應值(性能指標),通過數據轉換接口將其反饋到優化算法中,作為優化算法確定新一輪搜索方向的依據,并將搜索結果重新輸入仿真模型.上述過程反復進行,直至滿足預先設定的終止條件.常見的仿真優化過程模型見圖l[6].
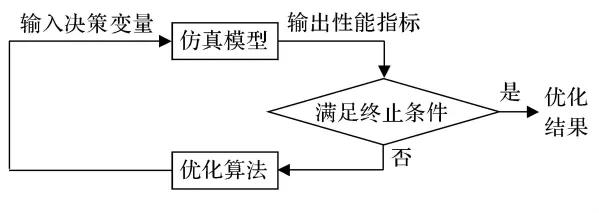
圖1 仿真優化模型
2 系統構成
2.1 估算模型
Egbelu提出AGV系統車輛規模的計算模型(式(1)~(5)中各參數表示意義,見表1),即通過非仿真的方法計算制造系統的車輛需求,在文獻中證明該模型在各種調度方法中能夠得到比較好的估算值.由于該模型是用解析的方法計算AGV系統車輛規模的一般模型,具有通用性,但是針對具體的系統約束條件有一定的誤差,因此本文采用該模型作為估算模型,得出估計值,以確定仿真實驗輸入變量取值范圍.加入估算模塊可以確定初始仿真實驗范圍,有效減少仿真與優化算法的迭代次數,提高系統求解效率.
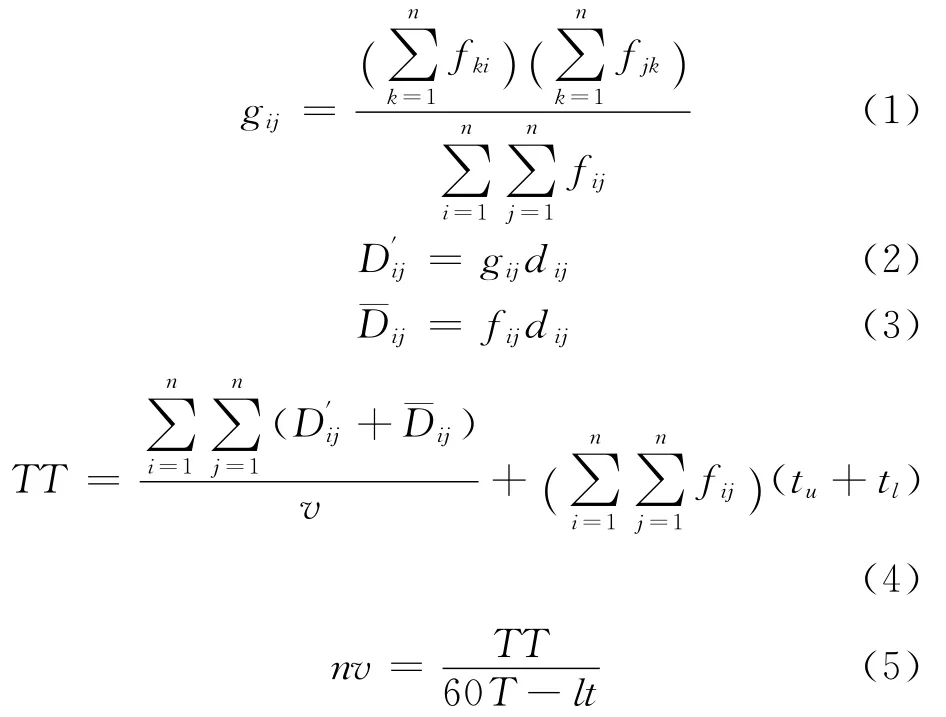
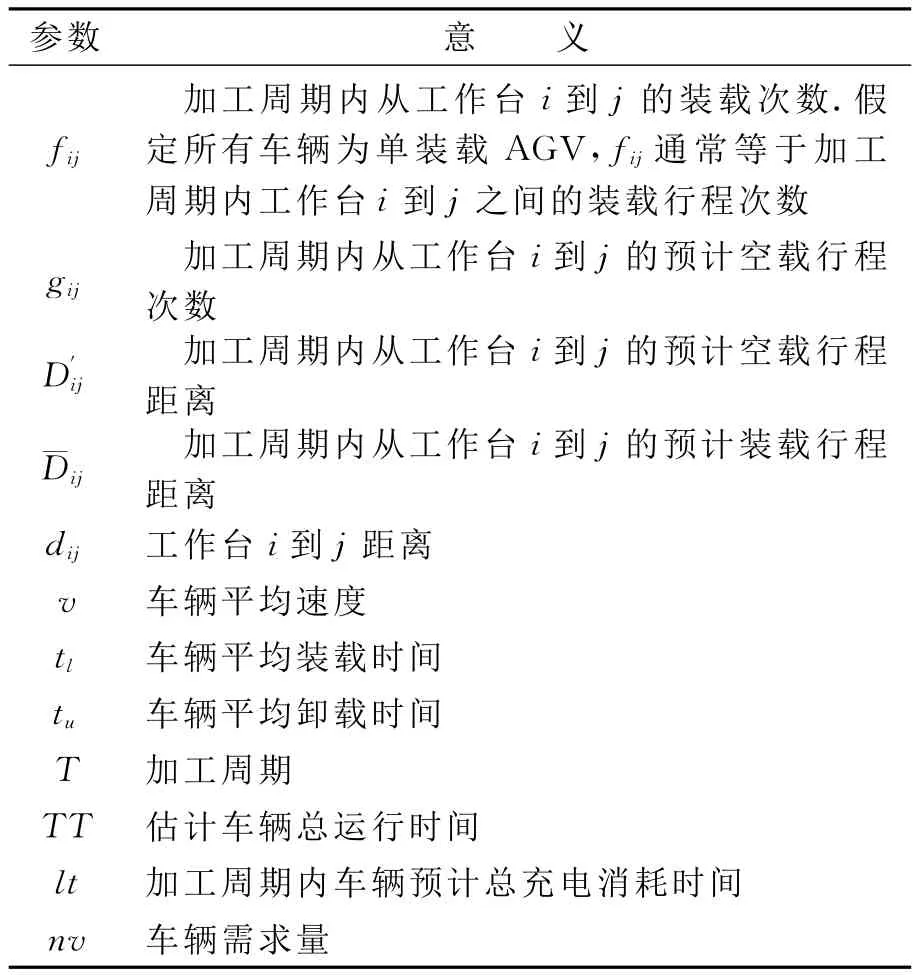
表1 各參數表示意義
2.2 仿真模型
2.2.1 模型建立 利用面向對象的仿真建模框架對柔性制造系統中的對象特征、對象行為及其之間的相互關系來進行系統建模,根據柔性制造系統的運行特點,面向對象的仿真系統由以下5大類對象構成:(1)實體類對象 加工中心、工件、路線等;(2)信息類對象 生產計劃、庫存信息、生產周期等;(3)控制過程類對象 物流控制、生產過程控制、生產調度等;(4)過程分析類對象 瓶頸分析、結果方差分析;(5)結果類對象 仿真結果顯示.
2.2.2 調度方法及運行機理 仿真系統運行時,以生產計劃等信息類對象作為主線,生產調度等控制過程類對象的控制為指導,操作對象即仿真實體類對象如工件由仿真時鐘進行狀態切換.具體過程為:系統運行時,實體類對象根據不同的控制策略由仿真時鐘觸發,形成離散系統的仿真事件,并相應改變實體的運行狀態,通過物流資源的運輸,形成實際的柔性制造過程.在本研究中柔性制造系統工作調度方式流程見圖2.
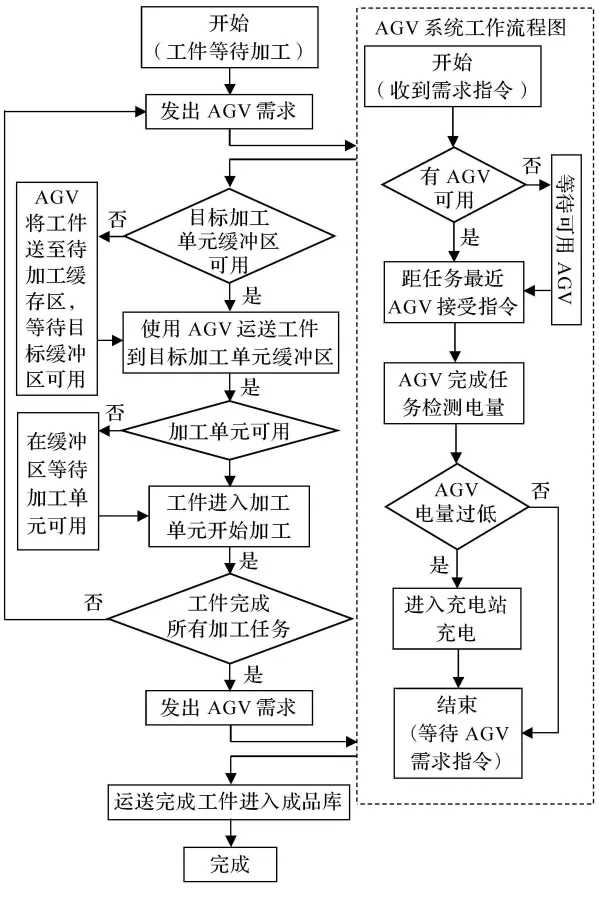
圖2 仿真流程圖
2.3 優化模型
對仿真結果進行方差分析是因為方差分析(ANOVA)是數理統計中常用的數據處理方法之一,方差分析就是根據試驗的結果進行分析,鑒別各個有關因素對試驗結果影響的有效方法,若隨機變量的取值集中在平均值附近,那么方差較小;若隨機變量的取值遠離平均值的分布,那么方差值就較大[7].
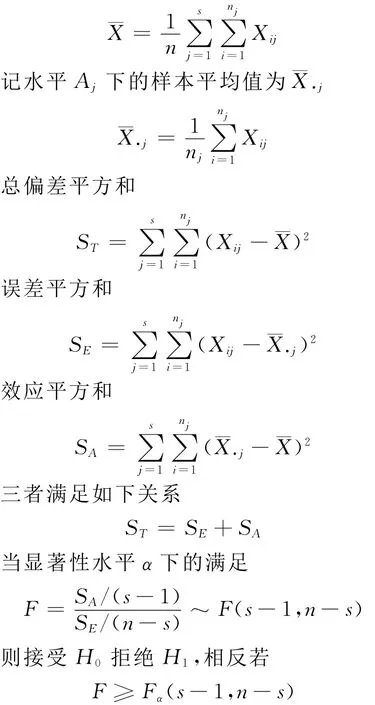
在本文中只考慮車輛規模對于AGV系統響應時間的影響,因此為單因素試驗方差分析.主要的思路如下:原假設 H0∶μ1=μ2,μ為平均響應時間,備擇假設H1∶μ1≠μ2,設車輛規模A有s個水平,在水平Aj(j=1,2,…,s)下,進行nj次獨立的仿真實驗,在水平Aj下第i次仿真試驗的結果為Xij,則數據的總平均為則拒絕H0接受H1.
經過大量的仿真實驗以及文獻研究[2-3,8],可以得到車輛數和平均響應時間有如圖3所示的關系,隨著車輛數的增加平均響應時間縮短,通過對相鄰的兩組實驗結果進行假設檢驗,可以得到拒絕原假設和接受假設的臨界點,在本研究中以AGV的平均響應時間為評價標準,認為該臨界點為所得到的車輛規模最優值.
3 系統運行流程
仿真優化系統的運行流程如圖4所示.
將估算模型,仿真模型,優化模型集成,建立整體模型.各個模塊通過軟件內部語言編輯程序進行集成,完成模塊間的通信、調用.
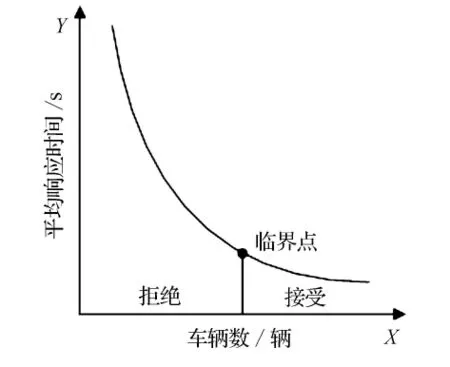
圖3 車輛規模與平均響應時間關系示意圖
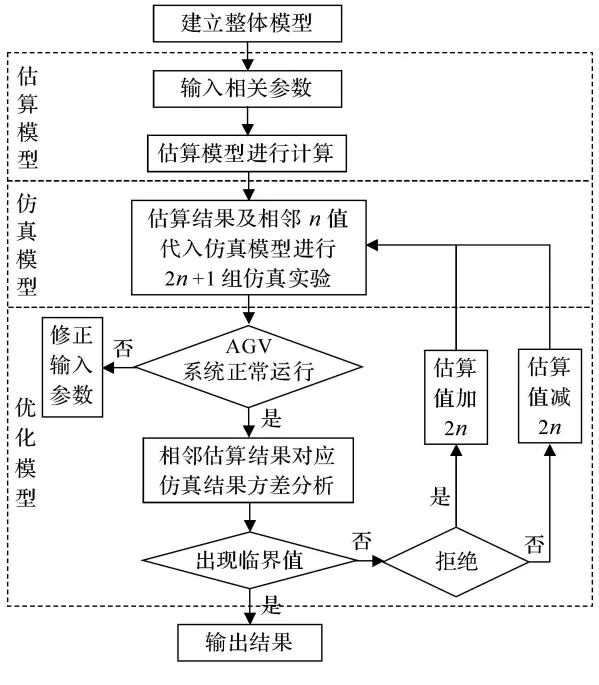
圖4 系統運行流程圖
4 實例分析
4.1 系統相關設置
本論文采用某研究院柔性制造系統為實例,驗證仿真優化方法確定AGV系統的車隊規模,該柔性制造系統由12個加工單元組成,立體倉庫有63個庫位,AGV車輛的設置為速度1m/s,加速度0.5m/s2.
為了簡化模型,在建模的過程中做出如下設置:(1)不考慮加工單元裝夾工件時間;(2)不考慮設備故障因素對仿真的影響;(3)忽略AGV系統的車輛堵塞;(4)AGV系統為單向行駛系統.
4.2 系統建模
采用Plant simulation作為系統建模平臺,該軟件具有面向對象和事件驅動的建模思想,層次化模型,強大的代碼擴展能力[9]等優點.基于以上優點建立柔性制造系統模型,同時使用軟件內部語言simtalk集成估算模塊,仿真模塊,優化模塊.如圖5所示,仿真界面由五部分組成,分別是立體庫區,AGV系統,生產制造單元,優化模塊,結果動態顯示區.
4.3 結果分析
表2~4顯示仿真優化過程得到最優解的過程.車輛數為3和4對應的仿真數據進行方差分析,結果如表2所列,F0.05(1,58)=4.01<13.47在顯著水平0.05下拒絕原假設H0,認為兩組實驗結果有顯著差異.車輛數為4和5對應的仿真數據進行方差分析,結果如表3所列,F0.05(1,58)=4.01>2.38在顯著水平0.05下接受原假設H0,認為兩組實驗結果無顯著差異.通過表4可以清楚地看出拒絕和接受原假設所對應的臨界值為4,因此在考慮平均響應時間單因素影響下車輛規模最優解為4輛.
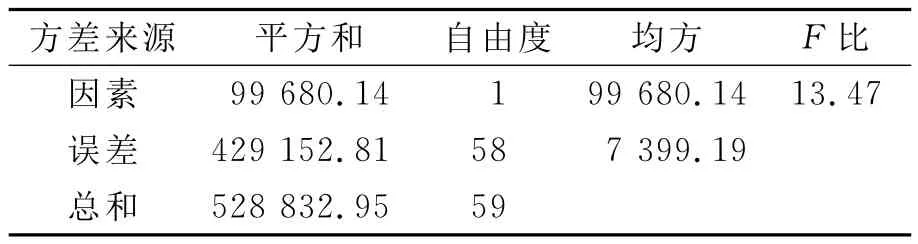
表2 車輛規模為3和4ANOVA結果
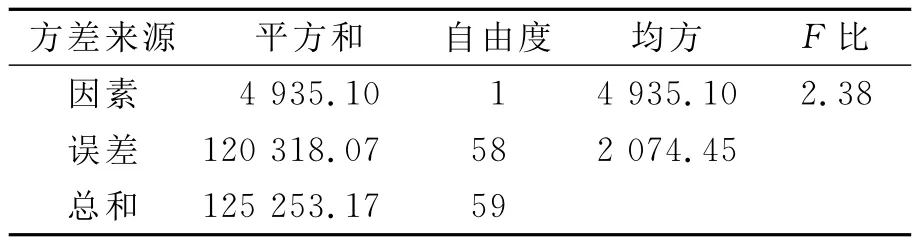
表3 車輛規模為4和5ANOVA結果
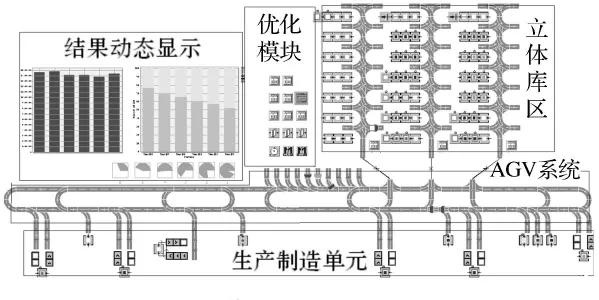
圖5 系統運行界面
為驗證仿真優化結果,選取AGV系統向某一加工單元運送工件的響應時間作為研究對象,如圖6所示為選取連續的30次運送行為,分別將AGV系統的車輛規模設置為2,3,4,5.由圖6可見,看到當車輛規模為2時,最大響應時間達到1 400s,嚴重影響系統的正常生產,車輛規模為3時平均響應時間明顯降低,但在第23次運送中出現最大響應時間600s,影響系統生產效率,車輛規模達到4時,從圖中可以看到可以滿足FMS系統的生產需要,并求得4輛AGV對應30次運送行為的響應時間對應以95%為置信度的置信區間為[135.64,170.37],即有95%的概率平均響應時間在區間[135.64,170.37]內,當車輛規模繼續增加平均響應時間變化緩慢,考慮到AGV價格高昂,AGV系統成本將劇烈增加,從仿真實驗結果可以看出系統配置4輛AGV是比較理想的方案.
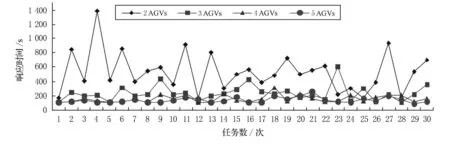
圖6 車輛規模與加工單元響應時間變化關系圖
5 結束語
本文研究了柔性制造環境下AGV系統車輛規模問題,采用仿真優化方法,通過計算機仿真軟件Plant Simulation建立優化模型,并通過估算的方法確定初始仿真實驗輸入變量取值范圍,提高了系統求解效率,節省了仿真成本.實例證明該優化方法能夠有效地獲得車輛規模的優化配置,并且計算效率較單純仿真實驗有顯著提高,同時彌補了解析方法求解誤差較大的缺點.
在研究的過程中沒有考慮不同車輛調度因素對車輛規模的影響,另外忽略了當車輛規模增大帶來的交通管理問題,這些方面可通過正交試驗設計,細化仿真模型等方法進一步研究.
[1]UM INSUP,CHEON Hyeonjae,LEE Hongchul.The simulation design and analysis of a flexible manufacturing system with automated guided vehicle system[J].Journal of Manufacturing Systems,2009(28):115-122.
[2]IRIS F A.Survey of research in the design and control of automated guided vehicle systems[J].European Journal of Operational Research,2006,170:677-709.
[3]EGBELU P J.The use of non-simulation approaches in estimating vehicle requirements in an automated guided vehicle based transport system[J].Material Flow,1987,4:17-32.
[4]MANTEL R J,LANDEWEERD.Design and operational control of an AGV system[J].International Journal of Production Economics,1995,41:257-266.
[5]嚴武元.配送中心AGV配置方案仿真研究[J].武漢理工大學學報:交通科學與工程版,2010(3):635-638.
[6]王國新,寧汝新,王愛民.仿真優化在制造系統中的應用現狀及發展趨勢[J].系統仿真學報,2008(1):1-6.
[7]盛 驟,謝式千,潘承毅.概率論與數理統計[M].北京:高等教育出版社,2002.
[8]VENTURA J A,RIEKSTS B Q.Optimal location of dwell points in single loop AGV system with time restrictions on vehicle availability[J].European Journal of Operational Research,2009,192:93-104.
[9]林則孟.系統模擬理論與應用[M].臺北:滄海書局,2006.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19