頭眼運動的HMB結構分析
2012-09-26 02:28:02王長元陳玉龍潘貞貞
電子設計工程 2012年22期
王長元,陳玉龍,潘貞貞
(西安工業大學 陜西 西安 710000)
隨著軟件工程領域研究的發展,尤其是軟件體系結構的快速發展,使利用軟件體系結構的方法來分析和設計一些復雜的系統變成可能。基于前庭功能的頭眼運動系統是一個較為復雜的仿生系統,它包括復雜的前庭器官系統和眼動系統。以往對前庭系統研究的方法主要集中在醫學上的生物學方法和數學建模的方法,文中將從一個全新的角度,用軟件工程的方法來分析前庭系統,并設計基于前庭功能的頭眼運動系統的HMB體系結構。
1 頭眼運動系統的生理學結構分析
生理學上,前庭系統的主要功能可以被描述為:人體在水平方向以任何角度作直線變速運動時,由于耳石膜的慣性,使橢圓囊斑上的毛細胞的纖毛受到牽拉,于是刺激毛細胞,毛細胞興奮后,產生的神經沖動經前庭系統傳入神經中樞,從而產生在這個方向的變速感覺和直線變速反射。頭部的位置變化時,就會引起耳石膜與毛細胞在空間的相對位置的變化,從而拉引相應的纖毛產生神經沖動,最終由神經中樞分析神經沖動并提供頭部位置的變化信息。
人體繞垂直軸作旋轉變速運動時,外半規管內的淋巴液由于壓力作用而流動,沖擊壺腹嵴,使其終帽向一側傾斜。終帽的傾斜引起內部毛細胞纖毛彎曲,產生神經沖動。有毛細胞產生的神經沖動經前庭系統傳入神經中樞,從而引起繞垂直軸的旋轉感覺和旋轉變速運動反射。與外半規管類似,其它兩對半規管可接受和它們所處平面相一致的旋轉變速運動刺激。最終,前庭神經中樞產生的神經沖動來支配眼動運動子系統的運動。
根據前庭系統的生理學描述,可以用建立模型的方法表示前庭系統中各個器官的功能以及它們之間的協作機理。前庭系統的生理學結構如圖1所示。
圖1顯示前庭系統主要由6大功能模塊構成,它們分別是:頭部相對運動子模塊、頭部水平運動子模塊、頭部旋轉運動子模塊、前庭神經中樞、眼動系統和神經沖動。每一個模塊完成上述生理學中所論述的相應功能。
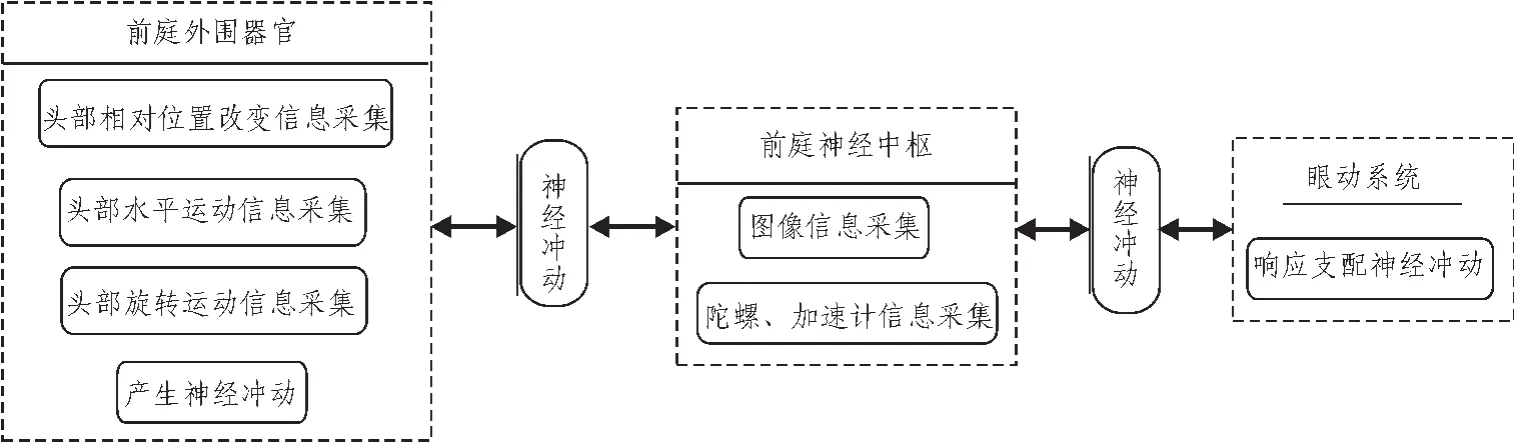
圖1 頭眼運動系統生理學功能結構Fig.1 Physiological structure diagram of the head and eyes movement system
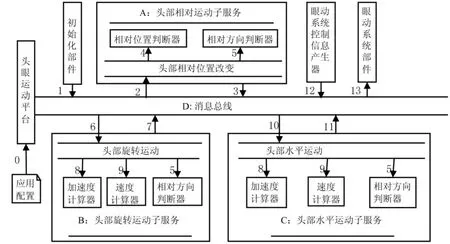
圖2 頭眼運動系統模Fig.2 Model diagram of the Head eye movement system
2 頭眼運動系統的HMB模型設計
在對前庭系統的物理視圖進行分析后,可以用軟件工程的方法設計軟件體系結構。所設計的基于前庭功能的頭眼運動系統結構模型如圖2所示。
本模型主要從層次消息總線的角度用構件來描述基于前庭功能的頭眼運動系統。
主要思想:按照“高內聚低耦合”的設計思想,將每個具有獨立功能的模塊設計成一個單獨的功能構件,然后用一條消息總線把各個功能模塊連接起來,每一個獨立的功能模塊完成一個功能相對獨立的功能。消息總線上傳輸著由各個功能模塊發出的不同信息,每個模塊只響應適合自己處理的信息,然后把處理的結果發送到消息總線上,由下一個需要處理的功能模塊來響應屬于自己模塊處理的信息并進行處理,再將處理的結果發送到消息總線上,直到受控部件響應并做出響應的響應行為。
模型中各個模塊的具體功能如下:
系統管理模塊:該模塊的主要功能是從全局的角度對整個系統進行實時的控制和管理,以達到穩定運行的目的。例如,當該模塊監聽到總線上長時間沒有消息指令傳輸時,該模塊應該做出相應的調整以保證整個系統的穩定。
初始化部件:主要完成整個系統的初始化工作。
受控系統信息產生器:響應采集信息模塊發送的信息并產生對“支配部件”支配的信息。系統啟動后首先響應“初始化部件”發來的初始化信息,然后,時刻監聽總線上模塊A、B和C發出的信息,并且立即進行處理,然后把處理的結果通過消息總線發送給“受控部件”。
受控部件:時刻監聽總線,響應“受控系統信息產生器”發出的信息做出相應的行為。
A:頭部相對運動子服務:主要響應頭部位置的變化并向消息總線上發送頭部相對位置的信息。
相對位置判斷器:給出此刻頭部位置相對于上一刻位置的變化信息。
相對方向判斷器:給出此刻頭部位置相對于上一刻方向的變化信息
B:頭部旋轉運動子服務:主要響應頭部旋轉運動并向消息總線上發送頭部旋轉運動的信息(例如,加速度和速度)。
加速度計算器:計算頭部旋轉的加速度。
速度計算器:計算頭部旋轉的速度。
相對方向判斷器:給出相對于上一時刻的方向。
C:頭部水平運動子服務:主要響應頭部水平運動并向消息總線上發送頭部水平運動的信息。
D:消息總線:消息總線的作用是把各個功能模塊連接在一起。各個功能模塊響應總線上適合自己處理的消息,然后將處理的結果最終再次發到消息總線上。
對圖2中小標號(1~13)的解釋:
0 :系統讀取配置文件
1 :初始化系統
2 :系統調用“頭部相對位置運動服務”模塊
3 :“頭部相對位置運動服務”模塊向總線發送服務
4 :“相對位置判斷器”向消息支線發送頭部的相對位置信息
5 :“相對方向判斷器”向消息支線發送頭部的相對方向信息
6 :系統調用“頭部旋轉運動子服務”模塊
7 :“頭部相旋轉運動子服務”模塊向總線發送服務信息
8 :調用“加速度計算器”計算加速度信息
9 :調用“速度計算器”計算速度信息
10:系統調用“頭部水平運動子服務”模塊
11 :“頭部水平運動子服務”模塊向總線發送服務信息
12 :“眼動系統控制信息產生器” 處理過程 ‘3’,‘7’,‘11’所發送的信息,并向總線發 送處理后的支配信息
13 :“眼動系統部件”響應支配信息
3 HMB在頭眼運動測量系統中的應用
基于層次消息總線的一體化頭眼運動測量系統結構主要由以下復合構件構成:頭盔、下位計算機系統、上位測控計算機系統3部分組成。
其中,復合構件頭部測量系統(頭盔):包括構件慣性測量單元、兩路高速相機,主要完成飛行員、駕駛員的頭部運動姿態、眼動圖像的數據采集功能;復合構件下位計算機系統:完成將采集到的數據重新打包,并采用無線傳輸方式將數據傳送至上位測試計算機;復合構件上位測控計算機:完成數據分析處理功能;構件初始化部件:完成系統的初始化功能,包括系統運行時狀態的初始化。頭眼運動測量系統HMB結構如圖3所示。
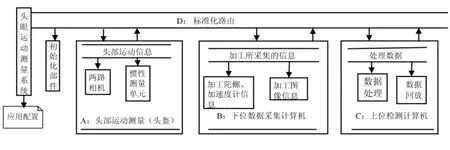
圖3 頭眼運動測量系統的HMB結構Fig.3 HMB Structure designed diagram of the Head eye movement system
3.1 復合構件頭部測量系統
本部分主要由左、右兩路攝像機和姿態儀組成,完成頭部運動原始數據的采集,包括:左攝像機和右攝像機以及姿態儀的數據采集。攝像機:為系統的視頻信息采集部分,下位機系統可以通過攝像機的SN在配置文件中獲得計算機連接的方向,并當攝像機處于正常狀態時進行被測試人員眼部的運動信息;姿態儀:為下位機系統提供被測試人員頭部運動的三軸加速度、三向旋轉角度。通過姿態儀可以獲得本測試人員的三軸加速度和四元數。
3.2 復合構件下位數據采集計算機
該部分負責對采集到的原始數據進行加工,包括:視頻數據、加速度數據、四元數,然后將這些數據打包并發送至上位檢測計算機。通過這種通用連接方法,上位機可以連接至下位機,獲取下位機傳來的信息。另外,本部分還負責對系統的狀態進行檢測,包括:兩路攝像機的工作狀態、姿態儀的狀態、網絡聯通性狀態以及電池電量狀態檢測。
3.3 復合構件上位檢測計算機
本部分實時同步接收人體的頭動和眼動數據,實時繪制頭動速度曲線與眼動位置曲線,進行頭動與眼動關系的分析。主要有4個模塊:1)系統自檢系統:檢查上位機系統各模塊的功能工作狀態;2)數據接收模塊:通過寬帶無線路由器接收下位計算機發送的數據;3)數據分析處理模塊:根據接收到的數據幀,實時分析被測者的嚴冬曲線、頭動曲線和相關性,計算相關參數;4)數據保存模塊:對已采集的原始頭動、原始眼動信號存儲、回放、凍結、打印等。
3.4 構件初始化部件
系統啟動時,對系統部件進行初始化,包括對兩路攝像機和姿態儀的初始化,以及在系統工作時完成功能性的狀態定時初始化等功能。
3.5 標準化消息路由
該模塊為系統提供消息總線的功能,采集數據的復合構件負責把采集的數據信息發送到該模塊上,負責分析處理數據的復合子構件負責從該模塊獲取數據。
4 結 論
上面所設計的HMB結構已經應用于頭眼運動測量系統中。基于這種結構的頭眼運動測量系統是該領域一種全新的研究方法。這種頭眼運動測量裝置已經廢棄了傳統運動模擬平臺的束縛,采用一種新的頭眼實時測量解決方案,測試所采集到的前庭功能的數據,分析頭眼運動的刺激和反應之間的關系。該設備具有傳播方式的多樣性,檢測設備高采樣率和調節設備的多自由度,從而提高了檢測的精度,并降低了對刺激裝置的要求,并可擴展到其他需要的平臺。在眼球運動的測量方面,國內主要是進行二維的眼動測量,但國外的研究進展一直到三維測量,而本設備對眼球運動數據的測量可以完成三維眼動測量。在這個領域里,進一步提高了測量眼球運動的準確性,也顯示了該系統結構的設計的合理性。
[1]孫久榮,黃億華,牟曉東.前庭代償:研究中樞神經系統可塑性的一個理想模型[J].生理科學進展,1998,29(3):209-213.
SUN Jiu-rong,HUANG Yi-hua,MOU Xiao-dong.Vestibular compensation:Study on plasticity of central nervous system an ideal model[J].Progress in Physiological Sciences,1998,29 (3):209-213.
[2]牛麗靜.前庭核向腦干和脊髓心血管調節區的投射[D].石家莊:河北師范大學,2004.
[3]Grant J.W., Best W.A., Otolith organ mechanics:lumped parameter model and dynamic response[J].Avia Space Envoron,1987(58):970-976.
[4]Grant J.W., Best W.A., Mechanics of the otolith organ-Dynamic response, Ann.Biomed Eng.,1986(14):241-256.
[5]Grant J.W., Best W.A, Lonigro R.Governing Equations of Motion for the Otolith Organs and Their Response to a Step Change in Velocity of the Skull[J].J.Biomench.Eng,1984(106):302-308.
[6]蘇海軍,徐明瑜.耳石系統的動力學響應[J].山東大學學報:自然科學版,2002(37):39-44.
SU Hai-jun,XU Ming-yu.The dynamic response of otolith organs[J].Journal of Shandong University:Natural Science Editio,2002(1):39-44.
[7]蘇海軍.前庭系統數學模型及分數階微積分的應用[D].濟南:山東大學,2002.
[8]徐明瑜,譚文長.半規管內流體動力學問題[J].中國科學(A輯),2000(30):272-280.
XU Ming-yu,TAN Wen-chang.Theproblemsoffluiddynamics in semicircular canal[J].Science in China:Series A,2000(30):272-280.
[9]張世琨,王立福,楊芙清.基于層次消息總線的軟件體系結構風格[J].中國科學:E輯,2002(6):293-400.
ZHANG Shi-kun,WANG Li-fu,YANG Fu-qing. On hierarchical message bus based software architecture style[J].Science in China:series E,2002(6):293-400.
[10]張友生.軟件體系結構[M].北京:清華大學出版社,2006.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
