基于單目視覺的自主牽引機器人研究
2012-10-08 00:55:14李金義齊立哲
制造業自動化 2012年9期
關鍵詞:特征提取
王 京,王 霆,李金義,齊立哲
WANG Jing1, WANG Ting 1 , LI Jin-yi1 ,QI Li-zhe2
(1.北京電子科技職業學院 汽車制造技術系,北京 100026;2. 智通機器人技術有限公司,廊坊 030001)
0 引言
機器人有兩個發展階段:普通機器人和智能機器人。普通機器人只能準確地重復執行某些簡單的規定動作;智能機器人則可像人類一樣自主完成一些復雜任務。智能機器人與普通機器人的區別是增加了各種傳感器,具有了感知、決策等能力能夠自主實現軌跡的規劃[1,2]。視覺是機器人獲取周圍世界信息最重要的來源之一,為智能機器人系統提供周圍的環境信息。視覺測量分類方法有多種,按所用視覺傳感器數量可以分為單目視覺、雙目視覺等。單目視覺雖然缺少了環境的立體信息,但由于其結構簡單、易標定,同時還能避免立體視覺中的視場小、立體匹配難的缺陷,在移動機器人中的研究仍然十分常見,特別是針對已知特征的物體的跟蹤場合得到了廣泛的應用[3~6]。
本文采用單目相機設計了一種在空間內能夠跟蹤靶標的自主移動機器人系統,它主要包括單目視覺系統、移動機器人平臺、無線模塊、上位機及控制軟件。上位機控制軟件首先對通過無線圖像采集模塊獲得圖像進行圖像處理與特征提取,獲得靶標的在圖像坐標系下的當前位置信息,然后與靶標的目標位置進行比對,獲得機器人的運動控制量,進而控制機器人始終跟蹤靶標,從而實現了基于圖像的機器人在空間位置控制過程。
1 機器人系統硬件組成介紹
設計的基于單目視覺系統的自主牽引機器人系統組成如圖1所示。
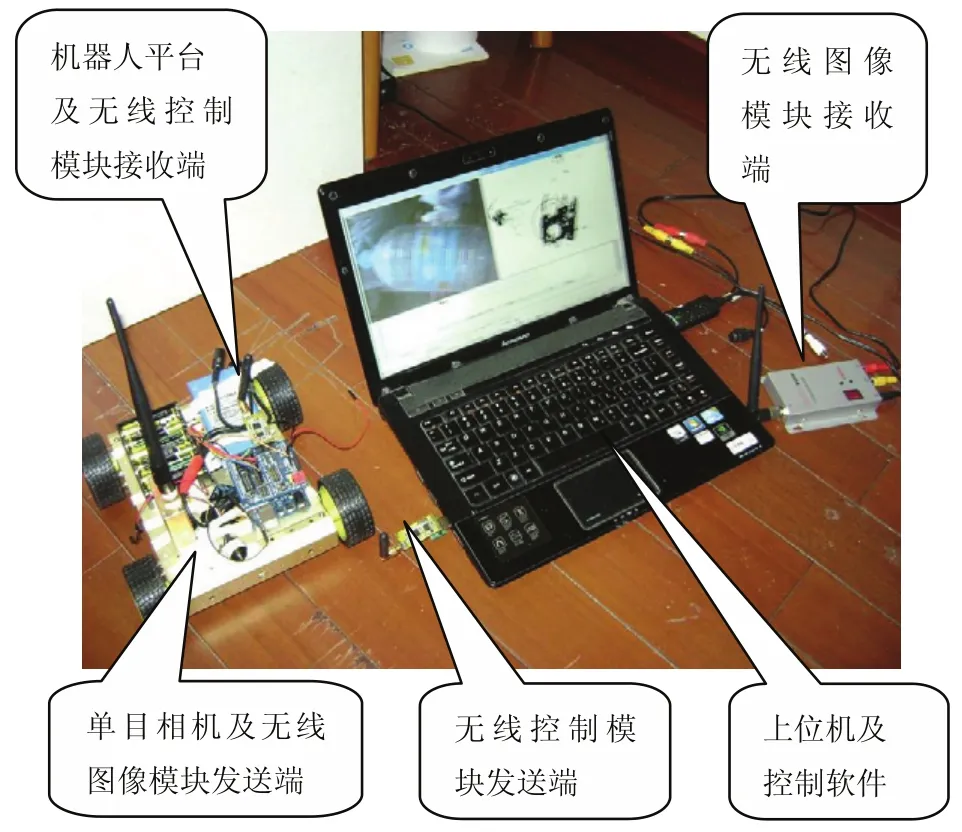
圖1 系統組成
它由一四輪機器人移動平臺、無線控制模塊、單目相機、無線圖像模塊、上位機及控制軟件組成。其中機器人移動平臺采用奧松機器人公司設計的基于Arduino的開放四輪機器人平臺,它的控制器是一個基于開放源代碼的USB接口的Simple I/O接口板(包括PWM輸出及ADC輸入輸出通道),能通過編程方便控制機器人平臺的前進、后退、左轉、右轉及停止等基本操作;無線控制模塊是一種多通道嵌入式無線傳輸模塊,其可設置很多的頻道,步進精度可為1khz,發送功率高達20mW,通過串口通訊的方式,通過安裝在上位機上的發送端發送指令,安裝在機器人平臺上的接收端接收指令,便可以實現上位機對機器人移動平臺的遠程運動控制;視覺系統采用CCD單目相機,安裝在機器人平臺上,可以實時采集靶標圖像;無線圖像模塊包含一發射端及接收端,接收端安裝在上位機上,發送端與相機相連并安裝在機器人平臺上。
2 軟件功能模塊及工作流程
根據機器人自主牽引過程,軟件主要包括圖像采集、圖像處理與特征提取、牽引算法規劃與控制等功能模塊,系統工作流程如圖2所示。系統開始工作后,由單目相機采集圖像并通過無線圖像模塊發送端發送圖像數據給上位機,上位機通過接收端接收到圖像后,先進行圖像處理,將靶標從背景圖像中提取出來,然后進行特征提取,提取出靶標的特征數據(球靶標球心及半徑);然后根據自主牽引算法對機器人運動進行規劃,并通過無線控制模塊發送端將運動指令發送給遠程機器人平臺,機器人通過接收端接收到運動命令后,便會執行運動命令,從而逐步跟蹤靶標位置。

圖2 系統工作流程
3 核心模塊介紹及實現
實現機器人自主牽引過程的核心模塊為靶標圖像處理與特征提取及牽引過程控制。
3.1 圖像處理與特征提取
本系統采用乒乓球作為跟蹤靶標,理論上球狀的乒乓球在CCD上成的像為一圓且顏色一般為黃色,根據這些特征,便可以采用基于顏色分割的方法及重心法便可以提取出乒乓球在圖像坐標系下的球心坐標值及半徑。具體計算公式如下:
其中:Rx, Ry, r 分別為靶標球心在視覺系統坐標系下的坐標值及以像素為單位的靶標半徑值;Ix,Iy分別為通過通過圖像分割后的靶標特征上各個點的圖像坐標值; 為提取出來的靶標特征的像素數目。根據這一過程提取出來的靶標兩個位置上的特征如圖3所示:
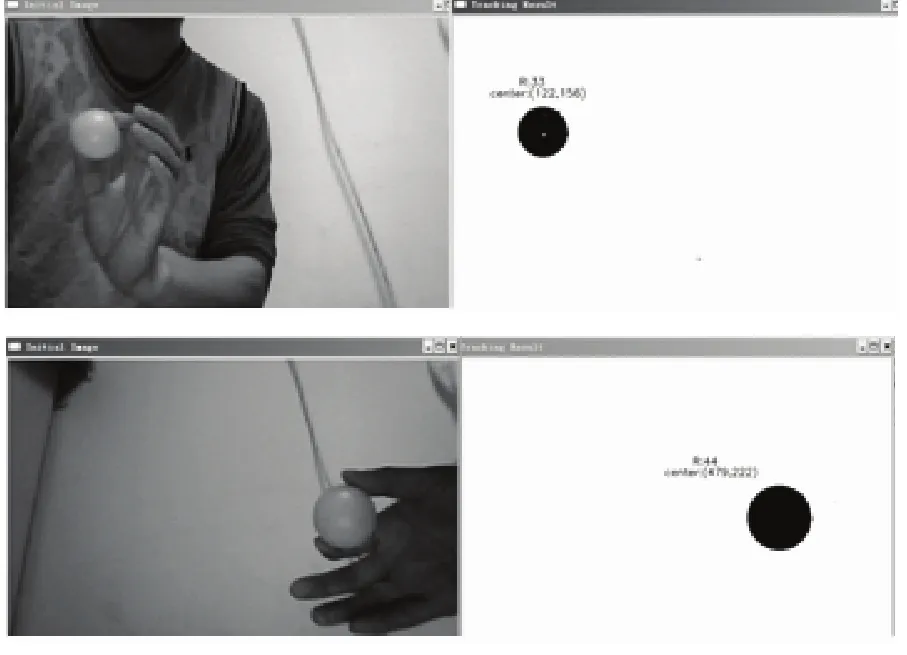
圖3 靶標在不同位置特征提取結果
3.2 跟蹤過程控制
單目視覺系統一般會丟失深度信息,為了實現機器人空間內的靶標跟蹤過程,需要借助靶標的已知特征及基于圖像的控制策略對機器人進行跟蹤控制。首先設定一目標圖像,對目標圖像進行圖像處理及特征提取,便可以獲得靶標的目標圓心位置及半徑,記為RxG,RyG,rG;同樣對當前圖像進行處理及特征取,也會獲得當前靶標的圓心位置及半徑,記為RxC,RyC,rC。如圖4所示。
從圖像可知,機器人與靶標的距離決定了靶標半徑的大小;機器人與靶標的方位決定了靶標圓心在在圖像中的位置。根據這一規律,可建立基于圖像的機器人控制策略如下。
1)機器人前進:當前半徑小于目標半徑
2)機器人后退:當前半徑大于目標半徑
3)機器人左轉:當前靶標在目標靶標的右側
4)機器人右轉:當前靶標在目標靶標的左側
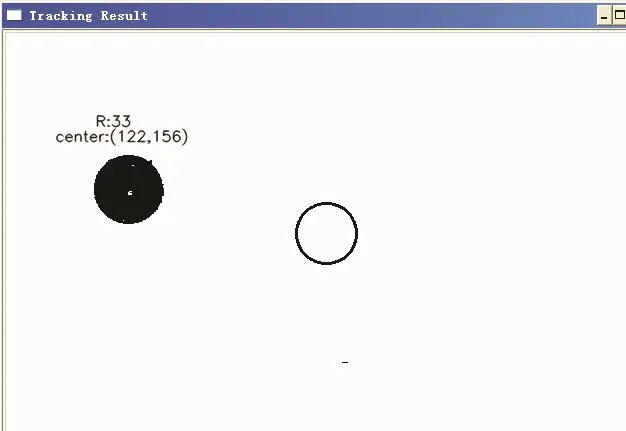
圖4 目標與當前圖像對比圖
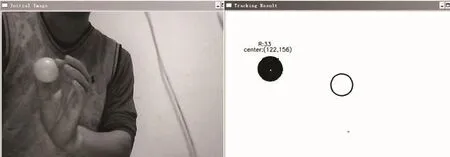
圖5 靶標在初始位置
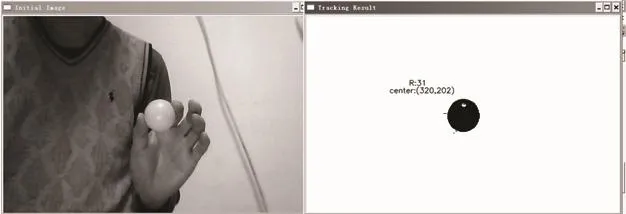
圖6 靶標在目標位置

圖7 機器人跟蹤靶標過程
4 結束語
本文采用單目視覺系統,設計了靶標的機器人自主牽引方法,通過實驗驗證了方法的有效性,實現了機器人自主牽引過程。后續可考慮采用高性能相機及優化圖像處理算法,進一步提高機器人牽引速度。
[1] 孟慶春,齊勇,張淑軍,杜春俠,殷波,高云.智能機器人及其發展[J].中國海洋大學學報(自然科學版),2004, (05).
[2] 董硯秋.智能機器人概述[J].網絡與信息,2007,(07).
[3] 張遠輝,韋巍,虞旦.基于實時圖像的乒乓機器人Kalman跟蹤算法[J].浙江大學學報(工學版),2009,(09).
[4] 弋英民,劉丁.基于單目視覺的輪式機器人同步定位與地圖構建[J].儀器儀表學報,2010,(01).
[5] 吳剛,唐振民.單目式自主機器人視覺導航中的測距研究[J].機器人,2010, (06).
[6] 劉磊,王永驥.基于單目視覺的機器人動態目標識別與跟蹤[C].Proceedings of the 26th Chinese Control Conference July 26-31,2007,Zhangjiajie,Hunan, China.
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49
