汽車電子機械制動系統的ABS控制策略與仿真分析
2012-10-12 13:29:30何玉嫻李伯全田洪勝
制造業自動化 2012年9期
何玉嫻,李伯全, 田洪勝
HE Yu-xian,LI Bo-quan, TIAN Hong-sheng
(江蘇大學 機械工程學院,鎮江 212013)
0 引言
隨著車輛技術的進步和汽車行駛速度的提高,車輛的安全性能越來越被廣泛的關注。電子機械制動(Electromechanical Brake, EMB)是一種全新的制動理念,EMB系統以電池為能源,電機為動力裝置,其簡捷的結構,高效的性能極大的提高了汽車的制動安全性。汽車防抱死制動系統(Anti-lock Braking System, ABS)作為一種新型的主動安全裝置,能夠在汽車緊急制動時防止車輪抱死,提高車輛的制動穩定性、縮短制動距離,減少交通事故發生率[1]。
汽車EMB防抱死制動系統的研究核心是其控制器設計中的控制策略的確定,本文通過建立車輛EMB防抱死系統的相關模型,在分析優化的基礎上確定ABS控制器的控制策略,利用Matlab/simulink對EMB防抱死系統的控制策略進行仿真,以驗證控制效果。
1 防抱死制動原理
汽車制動過程中,車速和輪速之間存在著速度差,也就是車輪與地面間有滑移現象,滑移的程度用滑移率表示[2]:
其中S是車輪滑移率,ω是車輛的車輪角速度,v 是即時車速,r表示車輪半徑。車輛車輪純滾動時滑移率為0,而當車輪抱死時滑移率為100%。根據試驗數據,車輛滑移率與附著系數的關系如圖1所示。

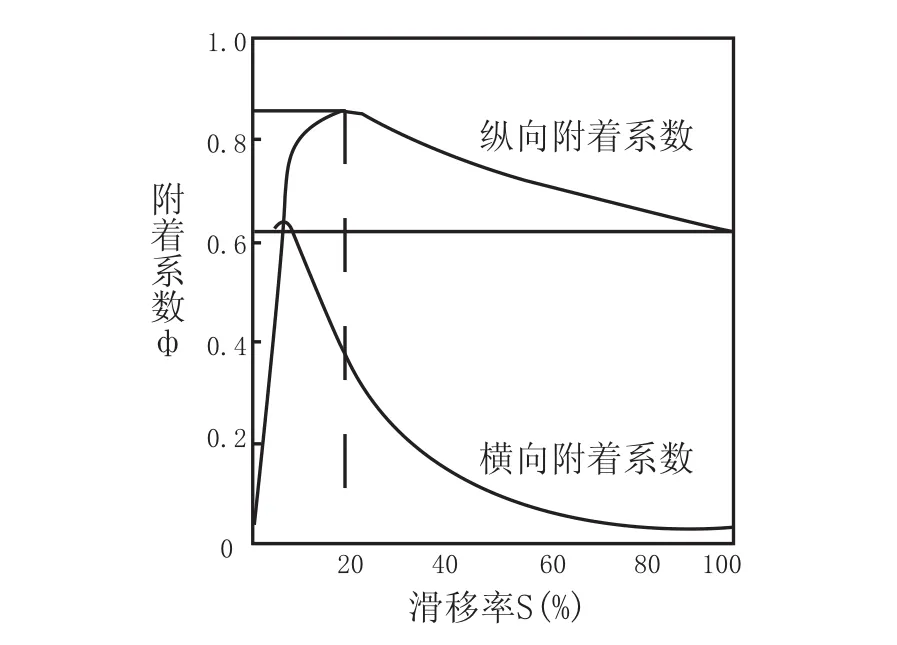
圖1 滑移率和附著系數關系曲線
由圖1可知,當滑移率s在15%至20%時,附著系數將達到最大值(峰值附著系數),而車輪完全抱死,s =100%時,附著系數有所下降,側向附著系數甚至達到0。因此,在制動過程中,如果輪胎抱死,不僅車輪的縱向附著系數沒有達到最大值,制動距離不能達到最短,而且,因為側向附著力變為0,車輛會失去方向穩定性和轉向能力。
若應用ABS防抱死系統,當駕駛員操縱制動系統引起車輪趨于抱死時,ABS便開始作用,調節車輪制動力,防止車輪抱死,使車輪與地面間的滑移率保持在20%左右,充分利用輪胎與地面間的峰值附著系數和高的側向附著系數,提高制動減速度、縮短制動距離以及保證汽車的制動方向穩定性。
2 相關動力學模型的建立
2.1 車輛單輪模型
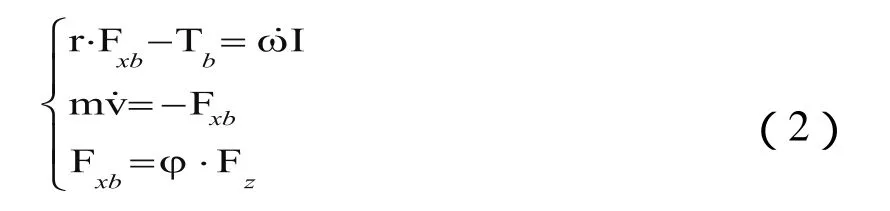
建立車輛單輪模型,此類模型主要描述制動性能,適合于車輛制動性能的分析,同時也可以簡化問題,如圖2所示為單輪制動受力模型,由圖2可得平面運動的微分方程[3]。
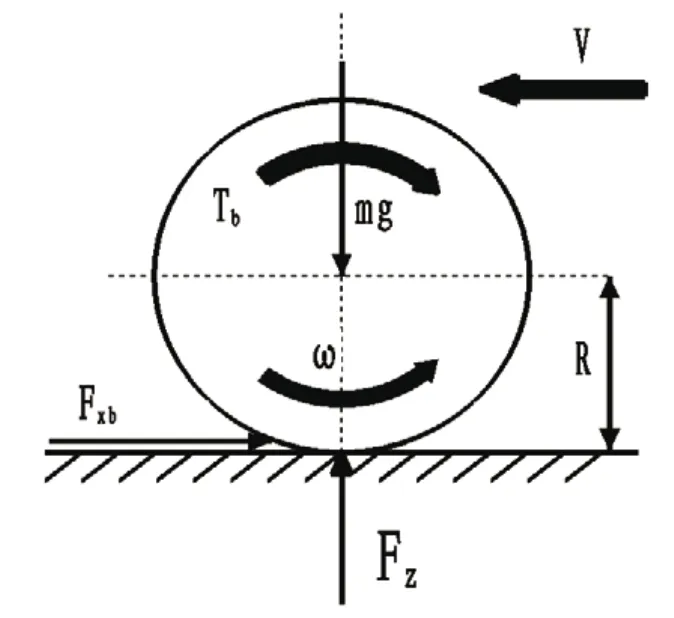
圖2 車輛單輪受力模型
2.2 EMB制動器模型
EMB制動器可以分為力矩電機、減速傳動機構和制動器模型,力矩電機選用無刷直流力矩電機,減速傳動機構選擇行星齒輪和滾珠絲杠機構。假設在制動過程中,無刷直流力矩電機工作在堵轉狀態下,即轉速為零,這樣電樞電壓完全加在電機內阻上面。力矩電機、減速傳動機構和制動器數學模型如式(3)所示[4]。
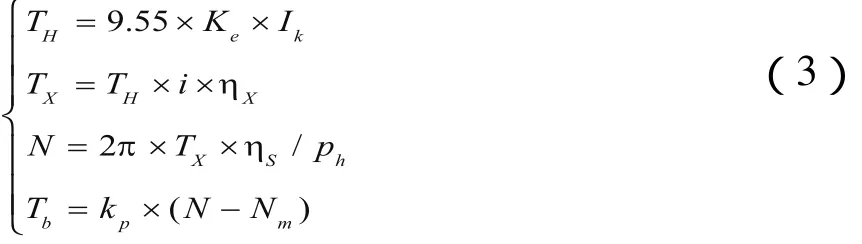
式中,TH為電機堵轉轉矩;Ke為反電勢系數;Ik為連續堵轉電流;TX為行星減速機構輸出轉矩;i 為行星減速機構傳動比;ηX為行星減速機構的機械效率;N 為絲杠輸出推力;ηS為滾珠絲杠副的效率;ph為絲杠導程;kp為制動器制動因數;Nm為克服彈簧力所需的推力,Tb為制動器制動力矩。
將(3)式中前幾項依次帶入到最后一項并求導,得

3 汽車EMBS的ABS控制策略與算法
3.1 汽車EMBS的ABS控制策略
EMBS由EMB控制器、電機、減速及運動轉換裝置等組成。EMB控制器用來控制電機輸出力矩的大小;電機用來把電能轉變為機械能,減速裝置具有減速增扭的功能,運動轉換裝置用來把電機旋轉運動轉換為直線運動,從而壓緊制動盤產生制動力。汽車采用EMB后,EMB控制器的輸入是ABS或電子制動踏板傳來的目標制動力。ABS控制器的輸入信號為車速和各個車輪的輪速,輸出信號為各個制動器的目標制動力[5]。
防抱死控制策略是ABS的核心,汽車制動防抱死系統(ABS)的控制目標是把車輪的滑移率限制在對應最大路面附著系數的范圍之內,從而使車輛獲得最大的地面制動力。現在汽車防抱死制動系統的控制方法很多,在產品中應用較廣的主要是邏輯門限值控制方法,但該方法降低了汽車的制動平順性。由于車輛制動過程的非線性和時變性,使得經典控制方法不能完全適應汽車ABS的工作過程;現代控制方法中PID控制雖然算法簡單,但是可靠性高。常規PID控制的缺點是,對于具有非線性、時變不確定性以及難以建立精確數學模型的系統,往往受到參數整定方法的限制,對運行工況的適應性差。模糊控制具有魯棒性強的優點,能較好地適應車輛路況突變等干擾,但是單純的模糊控制不能很好地消除系統的穩態誤差。模糊PID控制結合了模糊控制和PID控制兩者的優點,控制精度高,抗干擾能力強,實現較為簡單。因此,本文選用模糊PID控制作為防抱死控制策略。
3.2 汽車EMBS的ABS模糊PID控制算法
模糊PID控制器原理結構圖如圖3所示。模糊控制器輸入參數為車輪滑移率誤差e和滑移率誤差的變化ec,通過模糊邏輯生成PID控制器的三個參數Kp、Ki 、Kd 。
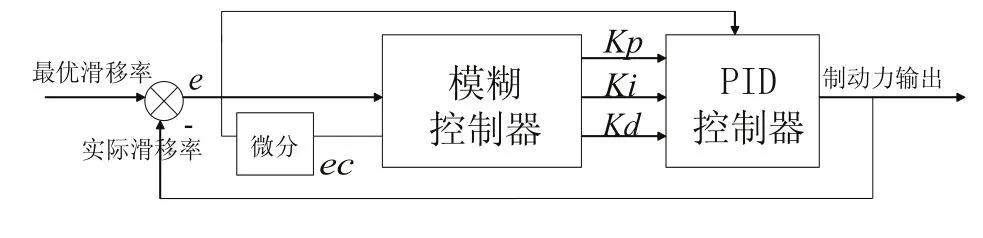
圖3 模糊PID控制原理框圖
參數e和 ec的模糊子集均為{負大,負中,負小,零,正小,正中,正大},表示為{NB,NM,NS,ZE,PS,PM,PB},而Kp 、Ki、Kd的模糊子集為{零,小,中,大},表示為{Z,S,M,B},所有變量的論域為{-6,-4,-2,0,2,4,6}。
PID控制器三個參數中比例系數Kp的作用在于加快系統的響應速度,積分系數Ki的作用在于消除系統的穩態誤差,微分系數Kd的作用在于改善系統的動態特性,抑制系統較大波動。在系統誤差e 較大時,為加快系統響應速度,避免因e 瞬間變化大而引起微分飽和,應采用較大的比例系數Kp 和較小微分系數Kd,同時避免系統過分超調,應限制積分系數Ki,通常取Ki=0;在系統誤差e中等大小時,為使系統響應的超調減少,同時保證系統的響應速度,應減小Kp 值,并且Ki的取值要適當,這種情況下Kd 的取值對系統影響較大,一般根據ec 的取值經驗;當ec 較大時,Kd可取稍小;ec 較小時,Kd 可取稍大;在系統誤差e 較小,接近穩定時,為減小系統穩態誤差應采用較大的積分系數Ki ,較小的比例系數Kp,較小的微分系數Kd 。根據此制定模糊規則如表1所示。
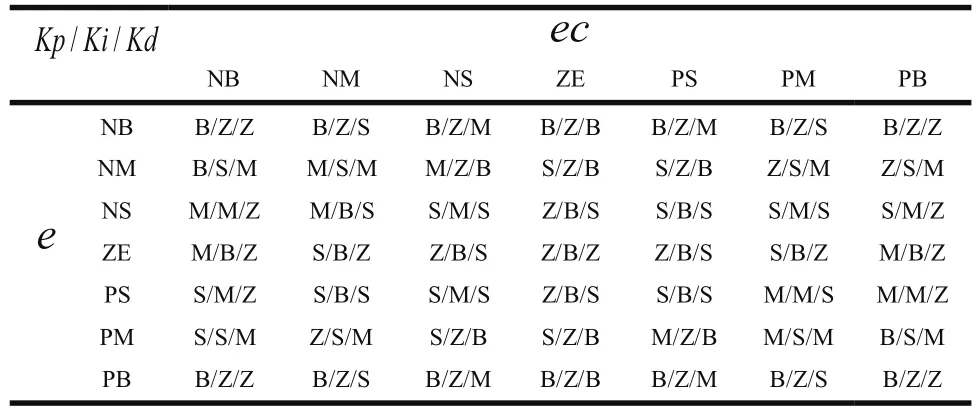
表1 模糊控制器模糊規則表
4 防抱死模糊PID控制算法仿真分析
本文在Matlab/Simulink環境下,根據給出的車輛單輪模型和EMB執行器模型,利用simulink工具箱,建立了仿真模型,并進行子系統封裝處理,插入基于模糊PID算法的仿真模型中,對典型路況進行仿真,仿真所用參數如表2所示。
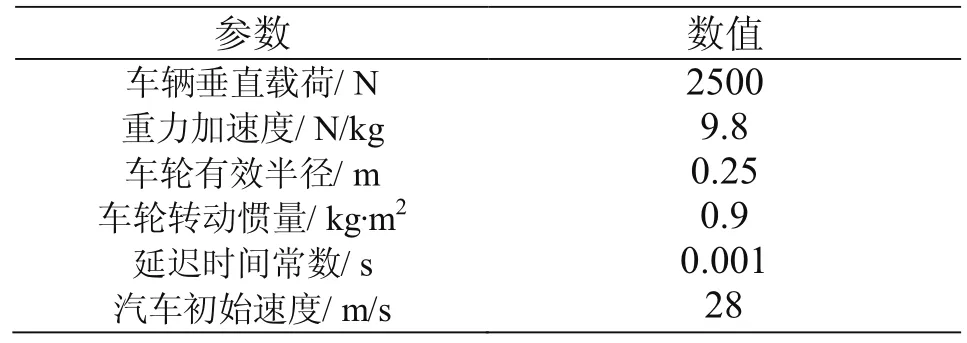
表2 汽車單輪模型相關參數
圖4、圖5分別為模糊PID控制算法仿真模型和車輛的車速、制動距離、滑移率仿真效果圖。
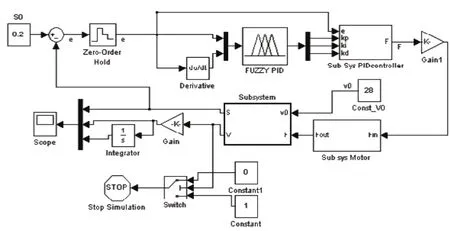
圖4 模糊控制算法仿真模型圖
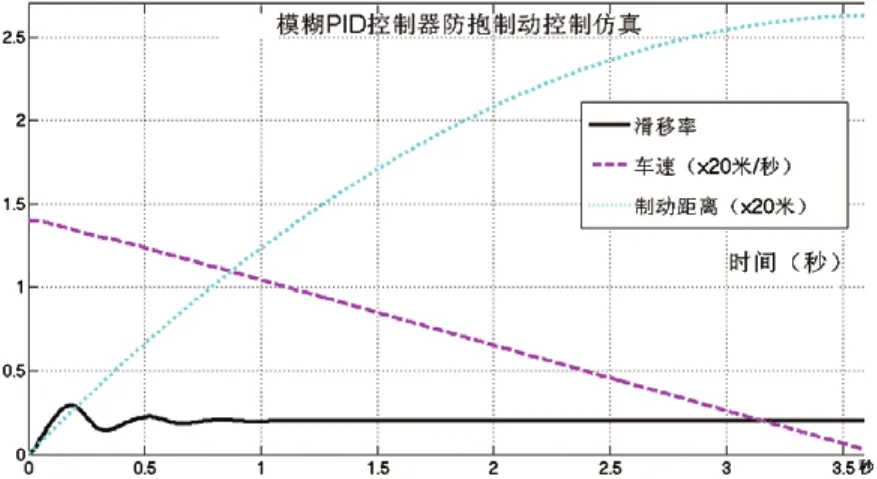
圖5 模糊PID控制算法仿真效果圖
設定初始車速為28m/s,即時速大約100公里,車輛開始制動并立即進入ABS狀態,使用模糊PID控制器,制動時間為3.64s,制動距離為52.98m,滑移性能較好,把車輪滑移率精確地控制在目標滑移率附近,兼顧了魯棒性和控制精度,可以達到理想的制動控制狀態。
5 結論
根據建立的EMB系統相關模型和汽車制動防抱死控制原理,給出了汽車ABS模糊PID防抱死控制策略,通過Matlab的Simulink工具箱對電子機械制動防抱死系統建立了系統仿真模型,仿真結果表明,模糊PID防抱死控制響應時間較短,穩態性能較好,把車輪滑移率精確地控制在目標滑移率附近,兼顧了魯棒性和控制精度,可以達到理想的制動控制狀態。
[1]李文娟,趙夢瑩,高小麗,等.汽車ABS自尋最優控制器的模擬研究[J].伺服控制,2010,(02):45-48.
[2]劉輝.車輛防抱制動系統仿真與實驗研究[D].合肥:合肥工業大學,2006.
[3]李林,李仲興,陳昆山.汽車ABS模糊控制方法的分析與仿真[J].江蘇大學學報(自然科學版),2003, 24(3).
[4]林逸,沈沉,王軍.線控制動系統防抱死特性模糊控制方法的仿真研究[J],公路交通科技,2006,(10):124-127.
[5]楊坤,李靜,李幼德,等.基于汽車電子機械制動系統EBD/ABS研究[J],系統仿真學報,2009,(3):1785-1788.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
