漸開(kāi)線(xiàn)少齒差行星傳動(dòng)的多目標(biāo)優(yōu)化設(shè)計(jì)
2012-10-12 13:29:36林尚飛
制造業(yè)自動(dòng)化 2012年9期
關(guān)鍵詞:優(yōu)化設(shè)計(jì)
林尚飛
LIN Shang-fei
(中國(guó)礦業(yè)大學(xué) 機(jī)電工程學(xué)院,徐州 221008)
0 引言
漸開(kāi)線(xiàn)少齒差行星齒輪傳動(dòng)與普通齒輪傳動(dòng)相比,具有傳動(dòng)比范圍大、承載能力大、效率高、結(jié)構(gòu)緊湊、體積小、重量輕、運(yùn)轉(zhuǎn)平穩(wěn)、噪音小、加工方便、制造成本較低等優(yōu)點(diǎn),受到了世界各國(guó)的廣泛關(guān)注,成為機(jī)械傳動(dòng)方面的重點(diǎn)研究方向之一。
目前國(guó)內(nèi)已有將少齒差行星傳動(dòng)應(yīng)用于絞車(chē)的實(shí)例,如廣東梅田煤機(jī)廠(chǎng)已批量生產(chǎn)用于井下的JD-1M型漸開(kāi)線(xiàn)少齒差式調(diào)度絞車(chē)。鐘相強(qiáng)[2]對(duì)漸開(kāi)線(xiàn)少齒差行星傳動(dòng)的齒輪體積作了優(yōu)化,樓錫銀[3]對(duì)少齒差行星傳動(dòng)的嚙合角和重合度作了多目標(biāo)優(yōu)化,但都沒(méi)有把齒輪齒形角作為設(shè)計(jì)變量,因此本文考慮了齒形角的變化對(duì)優(yōu)化結(jié)果的影響,建立少齒差行星傳動(dòng)的多目標(biāo)優(yōu)化模型,利用MATLAB求得其最優(yōu)解,從而獲得更加科學(xué)、綜合評(píng)判效果更好的設(shè)計(jì)結(jié)果。
1 漸開(kāi)線(xiàn)少齒差行星傳動(dòng)在絞車(chē)上的應(yīng)用
絞車(chē)采用K-H-V型少齒差行星齒輪傳動(dòng)結(jié)構(gòu),如圖1所示,絞車(chē)滾筒與內(nèi)齒輪副聯(lián)接成一體,兩個(gè)外齒輪相隔180°安裝于偏心軸上,并與內(nèi)齒輪嚙合,以抵消軸上的偏心力,動(dòng)力由左端輸入,滾筒輸出。

圖1 漸開(kāi)線(xiàn)少齒差行星傳動(dòng)在絞車(chē)上的應(yīng)用
已知絞車(chē)的基本參數(shù)為:
滾筒直徑—1.2m;
滾筒寬度—1.0m;
最大靜張力F—30KN;
最大靜張力差—30KN;
鋼絲繩平均速度—1.84m/s。
通過(guò)初步設(shè)計(jì)得到的結(jié)果見(jiàn)表1。
2 少齒差行星傳動(dòng)系統(tǒng)的優(yōu)化設(shè)計(jì)
2.1 設(shè)計(jì)變量
在行星輪和內(nèi)齒輪齒數(shù)、模數(shù)確定的情況下,影響齒輪機(jī)構(gòu)傳動(dòng)設(shè)計(jì)的主要因素是齒輪變位系數(shù)、齒頂高系數(shù)和嚙合角的選擇,另外,由文獻(xiàn)[1]可知,采用非標(biāo)準(zhǔn)齒形角,對(duì)提高傳動(dòng)效率效果顯著。因此取設(shè)計(jì)變量為:
2.2 目標(biāo)函數(shù)
取傳動(dòng)效率最大和齒輪體積之和(所用材料)最少為目標(biāo)函數(shù)。
1)傳動(dòng)效率最大為目標(biāo)函數(shù):
其中,ix2為少齒差行星傳動(dòng)的傳動(dòng)比,為一對(duì)齒輪的嚙合效率,且
其中,μe為齒廓摩擦因數(shù),E1,E2根據(jù)文獻(xiàn)[1]表14-6-11計(jì)算。
2)以齒輪所需材料最少為目標(biāo)函數(shù):
其中,b為外齒輪齒寬,df1和df2為外、內(nèi)齒輪齒根圓直徑,da1和da2為外、內(nèi)齒輪齒頂圓直徑。
3)據(jù)目標(biāo)規(guī)劃法構(gòu)造統(tǒng)一目標(biāo)函數(shù):

2.3 約束條件
1)性能約束。首先應(yīng)防止產(chǎn)生齒廓重疊干涉,即:

a'—行星輪與內(nèi)齒輪間的實(shí)際中心距 ;
a —行星輪與內(nèi)齒輪間的理論中心距;

αa1—行星輪齒頂圓壓力角;
αa2—內(nèi)齒輪齒頂圓壓力角。
為保證傳動(dòng)連續(xù)平穩(wěn)無(wú)沖擊,少齒差傳動(dòng)的重合度εa必須大于1,即:
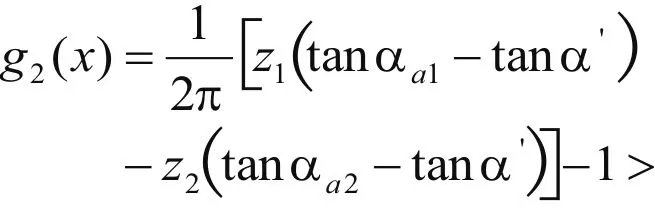
2)結(jié)構(gòu)約束。行星輪與內(nèi)齒輪不發(fā)生齒頂干涉的約束條件為:

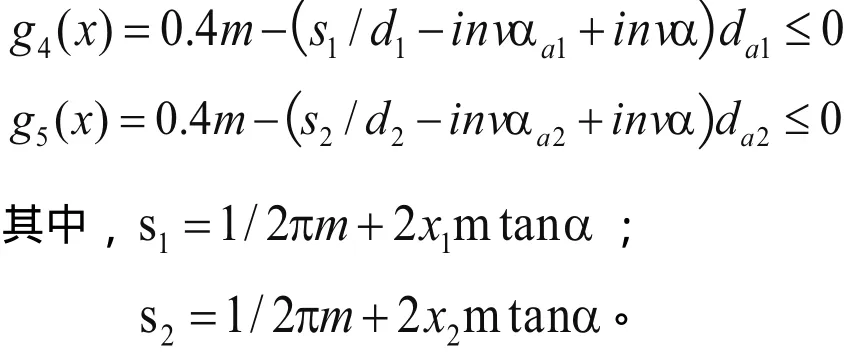
3)齒頂厚度的限制條件。對(duì)正變位齒輪為防止齒頂變尖,應(yīng)保證齒頂厚度大于等于0.4倍的模數(shù),即:
4)為保證漸開(kāi)線(xiàn)齒廓,內(nèi)齒輪的齒頂圓必須大于基圓,即

5)為避免小齒輪齒根過(guò)度曲線(xiàn)干涉,da2應(yīng)滿(mǎn)足下式:

6)強(qiáng)度條件。由于行星輪與內(nèi)齒輪齒廓曲率半徑很接近,輪齒接觸面積較大,接觸應(yīng)力較小,因此只校驗(yàn)輪齒彎曲強(qiáng)度。
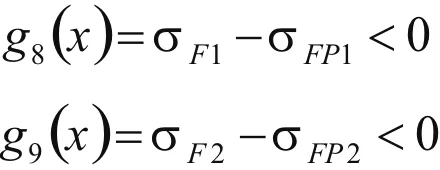
式中,σF1,σF2—外、內(nèi)齒輪的齒根彎曲應(yīng)力;
σFP1,σFP2—外、內(nèi)齒輪的許用彎曲應(yīng)力。
7)邊界約束。根據(jù)文獻(xiàn)[1],取內(nèi)外齒輪的變位系數(shù)0≤x1≤1.75,0≤x2≤2.01,采用非標(biāo)準(zhǔn)齒形角為6°≤α≤14°,齒頂高系數(shù)為0.06≤≤0.8,嚙合角為20°≤α'≤70°。至此,就得到了少齒差行星傳動(dòng)的多目標(biāo)優(yōu)化數(shù)學(xué)模型,即:求,使min f(x)

表1 優(yōu)化設(shè)計(jì)與初步設(shè)計(jì)結(jié)果對(duì)比
2.4 模型的求解
1)可行方向法簡(jiǎn)介。可行方向法是求解不等式約束問(wèn)題
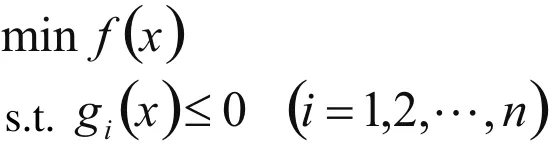
的一種直接算法,該算法的基本思路是從可行域內(nèi)的一個(gè)可行點(diǎn)出發(fā),選擇一個(gè)合適的搜索方向Sk和步長(zhǎng)因子ak,使下一個(gè)迭代點(diǎn)xk+1=xk+akSk,即不超出可行域,又使目標(biāo)函數(shù)有所下降,其程序框圖見(jiàn)圖2。
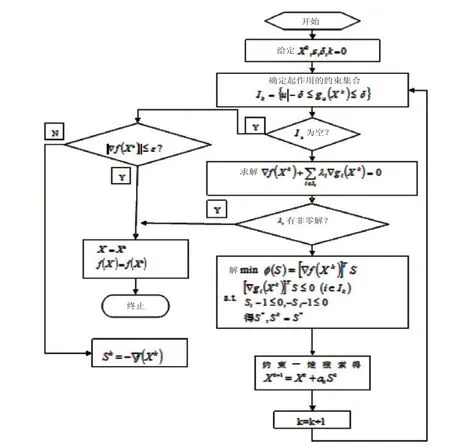
圖2 可行方向法程序框圖
2)求解。本文的模型屬于有約束非線(xiàn)性多目標(biāo)優(yōu)化問(wèn)題,先調(diào)用MATLAB工具箱中的fmincon函數(shù)求得兩個(gè)單目標(biāo)函數(shù)f1(x)、f2(x)在最優(yōu)解處的值分別為:
3 結(jié)論
比較優(yōu)化設(shè)計(jì)與常規(guī)設(shè)計(jì)的結(jié)果可知:
1)優(yōu)化后的漸開(kāi)線(xiàn)少齒差行星齒輪采用非標(biāo)準(zhǔn)齒形角,正變位,超短齒,并且是正傳動(dòng)。
2)內(nèi)外齒輪均采用了較大的正變位,齒根厚度有明顯增大,又采用了超短齒制,使得齒根彎曲強(qiáng)度也有所提高。
3)轉(zhuǎn)臂軸承的壽命一直是少齒差行星傳動(dòng)中的薄弱環(huán)節(jié),優(yōu)化結(jié)果使嚙合角 顯著減小,從而也提高轉(zhuǎn)臂軸承的壽命。
4)齒輪副嚙合效率提高2.74%,制造齒輪所需材料減少24.95%。
[1]成大先,機(jī)械設(shè)計(jì)手冊(cè).第五版第3卷[M].化學(xué)工業(yè)出版社,2008.
[2]鐘相強(qiáng).漸開(kāi)線(xiàn)少齒差行星傳動(dòng)模糊可靠性?xún)?yōu)化與CAD/CAE研究[D].西北農(nóng)林科技大學(xué),2006.
[3]樓錫銀.K-H-V少齒差行星傳動(dòng)的模糊可靠性?xún)?yōu)化設(shè)[J].機(jī)械制造,2008,46(528):38-39.
[4]王光建,蔣漢軍,褚志剛.漸開(kāi)線(xiàn)少齒差內(nèi)嚙合齒輪副幾何設(shè)計(jì)研究[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2011,42(4):201-205.
[5]陶桂寶,李澤群.NN型漸開(kāi)線(xiàn)少齒差行星傳動(dòng)齒輪副的設(shè)計(jì)[J].現(xiàn)代制造工程,2007,(8):116-118.
[6]郭益友,最小體積圓柱齒輪減速器的優(yōu)化設(shè)計(jì)[J].通用機(jī)械,2006,(4):80-81.
[7]趙繼俊,優(yōu)化技術(shù)與MATLAB優(yōu)化工具箱[M].北京:機(jī)械工業(yè)出版社,2011:141-172.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
