基于ARPA算法的航海應用研究*
2012-10-16 08:04:20王斌
艦船電子工程 2012年4期
關鍵詞:船舶
王 斌
(中國人民解放軍海軍蚌埠士官學校航海教研室 蚌埠 233012)
1 引言
自動雷達標繪儀譯自英文Automatic Radar Plotting Aid簡稱ARPA,亦即“自動避碰系統”是以分析過去的雷達信息為基礎,依靠本船行動的變化提前預測出相對運動的變化。目前船舶上大多裝備的ARPA是矢量型,即DARPA。它是在目標被錄取后,計算機即對其進行自動跟蹤,約30s后,在顯示屏幕(Plan position indicator-PPI)上以目標所在的位置為起點,出現目標的速度矢量,矢量時間連續可調,既可以顯示相對運動速度矢量,也可以顯示真運動速度矢量,并能以數字方式顯示DCPA、TCPA和目標運動要素,這種類型的顯示與傳統的標繪方法相似,海員在使用時也較方便[1]。但是D-ARPA存在的不足是:首先,不論變向還是變速避讓,必須進行試操縱,操作過程耗時,程序復雜,不直觀;其次,屏幕上不能直觀顯示DCPA、TCPA;另外,不能實時確定避讓決策和實時評估和直觀顯示避讓決策的有效性。
本文設計了一種能夠直觀地為操縱者提供當前態勢,通過調整機動船的速度矢量,以可視化的方式為操縱者提供避碰決策依據的雷達避碰算法。
2 自動避碰系統算法[7]
2.1 坐標系統轉換算法
坐標系轉換算法是進行雷達避碰繪算的基礎,用于羅盤坐標系和笛卡爾坐標系轉換的算法可以以極坐標作為中介進行坐標轉換。現將算法描述如下
1)羅盤坐標轉換為極坐標:

2)極坐標轉換為笛卡爾坐標(直角坐標):

3)將笛卡爾坐標轉換為極坐標:
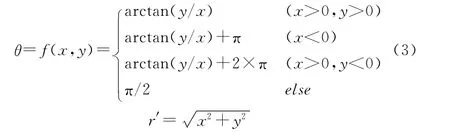
4)將極坐標轉換為羅盤坐標:

2.2 目標運動要素提取算法
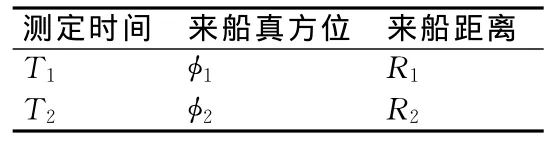
表1 目標要素
設:本船要素為:(CT,V),雷達測定來船數據為
1)將雷達測定的來船數據(羅盤坐標)轉換為笛卡爾坐標:

2)計算時間區間[T1,T2]內我船速度矢量的反矢量:

式中:Span(T2,T1)為計算時間間隔的函數。
3)繪算來船的運動要素:

2.3 避碰要素繪算算法[4,8]


2)求∠A1′C′B′和∠A2′C′B′
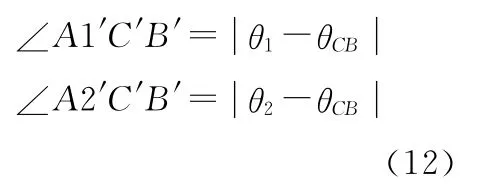
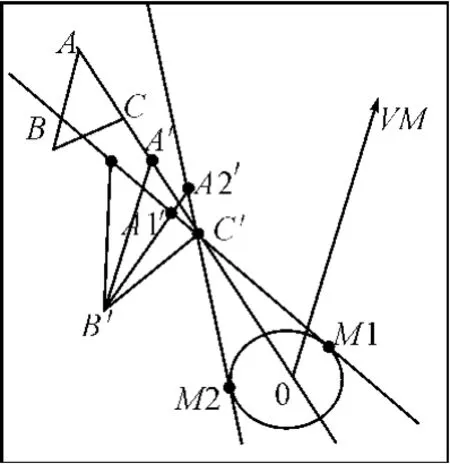
圖1 避碰要素繪算圖解
3 基于算法的航海應用舉例
3.1 系統框架設計[5~6]
在進行相關技術和算法的驗證之后,ARPA系統平臺采用結構化的程序構建方法,根據相應的功能要求將平臺劃分為態勢繪算模塊、避碰繪算模塊、顯示模塊、交互模塊和擴展接口模塊五個模塊進行實現。系統的結構如圖2。
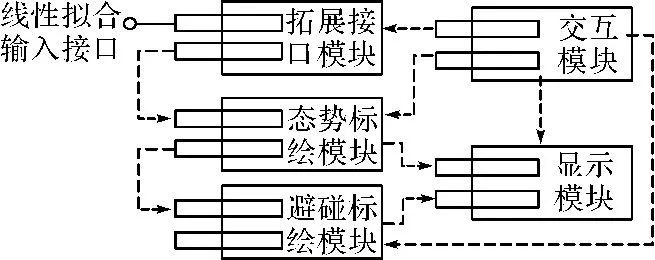
圖2 拓展ARPA算法系統框架設計
1)交互模塊:用于對平臺參數進行初始設定、輸入初始態勢、管理目標信息、設定避碰模式和顯示方式。
2)態勢繪算模塊:用于對由拓展接口模塊輸入的初始態勢進行標繪,對各目標的運動要素和碰撞威脅級別進行計算和標繪,對DCPA和TCPA進行計算和標繪。
3)避碰標繪模塊:用于對當前態勢下的各目標根據設定的安全圓半徑(DCPA0)和標繪時延(Span)進行避碰繪算。
4)顯示模塊:用于顯示當前態勢下各目標繪算結果并根據避碰顯示設定標繪在艦操圖上。
5)拓展接口模塊:用于接受界面輸入或雷達點跡線性擬合程序的目標初始態勢。
3.2 基于上述拓展算法的船舶接近到相遇機動的ARPA實踐過程[3]
為了保證本文所設計的算法的可操作性,選取現在船舶普遍使用的RM-1290雷達組合的自動避碰系統進行具體的操作步驟闡述。操作步驟如圖3所示。
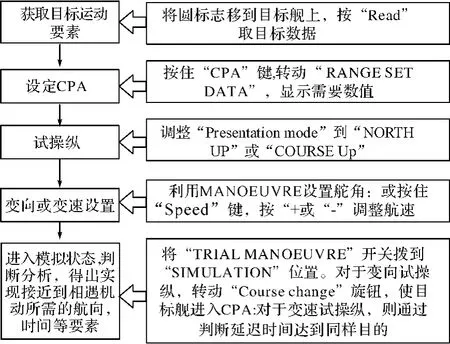
圖3 拓展ARPA算法操作過程
4 結語
針對目前船舶大多裝備的D-ARPA雷達計算出目標運動矢量操作復雜,不夠直觀的特點,本文設計了一種操作簡單且能夠直觀地為操縱者提供當前態勢,并能實時為操縱者提供避碰決策的雷達避碰算法,對船舶操縱者保證航行安全,有重要意義[2]。
[1]姚洪濱.航海學[M].北京海潮出版社,2001:56-67.
[2]王世遠.航海雷達與ARPA[M].大連海事大學出版社,1998:23-24.
[3]石侃.雷達標繪自動化模塊算法研究[C]//船舶航泊實踐研究論文集,2010:123-126.
[4]熊和金,劉祖源.船舶避碰控制系統模型研究[J].武漢造船,2000,6(3):48.
[5]程啟明,馬如宏.船舶自動航行系統[J].鹽城工學院學報,1999,12(3):67-68.
[6]齊國清,賈欣樂.船舶綜合導航系統[J].大連海事大學學報,1998,24(1):31-32.
[7]張文濤,譚毅華,余晉剛.橋區運動船舶的檢測和跟蹤[J].計算機與數字工程,2011,39(10).
[8]姚杰,吳兆麟,方祥麟.船舶碰撞危險的模糊決策[J].大連水產學院學報,1998,13(2):16.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
