艦船運動姿態仿真與多層AR預報研究*
2012-10-16 08:04:20王玉珍姜禮平
艦船電子工程 2012年4期
王玉珍 姜禮平 肖 鵬
(海軍工程大學 武漢 430033)
1 引言
艦船構成海上的主要戰斗力,各種作戰裝備如彈炮裝備、艦載機等均以艦船海上作戰平臺為依托。保障艦船航行的安全性,以確保艦船各項作業的順利完成,是我國海軍關注的重點。為此,國內諸多單位陸續開展了艦船運動姿態預報理論的研究[1~3]。
對艦船運動姿態預報的方法[4~5]主要有頻域分析法和時域分析法兩種,其中,頻域分析法假設任何一種無趨勢的時間序列都可以分解成若干不同頻率的周期波動,從能量疊加角度進行時間序列分析與預報,該方法是一種非常有用的動態數據分析方法,但方法復雜,結果抽象,有一定的使用局限性;時域分析法認為事件的發展通常都具有一定的慣性,通過尋找序列的相關關系進行預報,其理論基礎扎實,操作步驟規范,分析結果易于解釋,是時間序列預報的主流方法。
2 艦船運動姿態仿真
艦船航行海情復雜,隨機海風、海浪、洋流等因素均對艦船運動產生較大影響。本文在仿真隨機風浪的基礎上構建船舶運動姿態仿真模型。
2.1 隨機風浪仿真
隨機風浪的建模方法主要為波浪疊加法[6]和有理譜法。本文采用波浪疊加法進行海浪仿真。某一定點海浪在t時刻的振幅表達式如下:

式中,ζai為單元規則波的振幅;ωi為單元規則波的圓頻率;εi為單元規則波的相位,可在0~2π之間任意取值,且是等概率分布的。
本文采用紐曼海浪譜進行分析,即:

式中,u為平均風速,m/s;ω為波浪圓頻率,m/s-1;g為重力加速度,9.81m/s2。
由此,海浪波傾角為:

綜上,即可求得波傾角仿真規律。取風速u為8(m/s),規則海浪頻率ω取0.3~3(rad/s),步長為0.1(rad/s),采樣頻率為0.1s。仿真得到隨機海浪的波傾角如圖1所示。
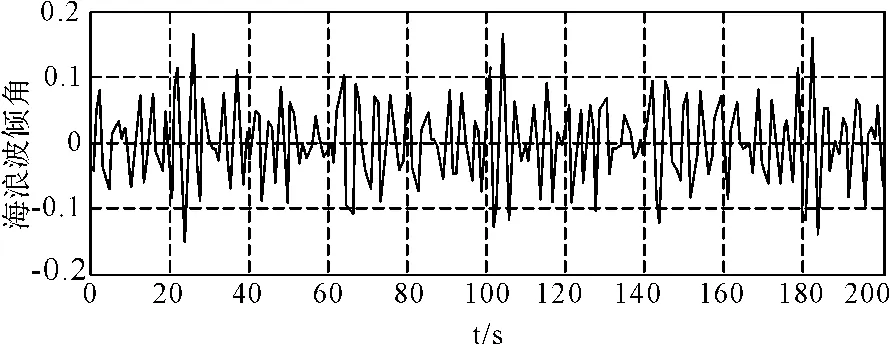
圖1 隨機海浪波傾角仿真
2.2 隨機風浪中的艦船運動仿真
艦船在海上航行有橫搖、縱搖、艏搖、縱蕩、橫蕩、垂蕩六自由度的運動姿態[8]。本文以橫搖為例,將橫搖角作為衡量船舶橫搖運動的標準。通常,艦船橫搖角的影響因素包括船型參數、艦船航速、浪向角及隨機風浪等。
假定船體為剛體,忽略它的彈性變形。根據剛體動平衡原理,船舶的平衡條件為力矩為0。按照Conolly理論,則有船舶橫搖運動方程[9]為


綜上,給定船長L=112.5m,船寬B=32.2m,吃水d=5.4m等船型參數,在船速V=10m/s,浪向角β=30°,仿真在4~5級海況的隨機風浪中船舶的橫搖角如圖2所示。
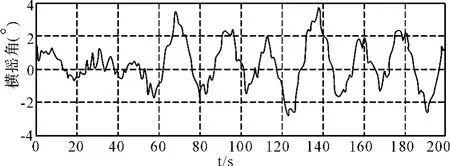
圖2 船舶橫搖角仿真
3 艦船運動姿態預報
自回歸模型是常用的時間序列分析模型,運算簡單易于執行,適用于線性時間序列分析。而艦船運動姿態一般是非線性、非平穩的,因此,可采用多層自回歸模型,使非線性問題線性化,不規則對象規則化。
3.1 自回歸預報模型
自回歸模型[10],簡稱AR模型。該模型僅通過時間序列變量的自身歷史觀測值來反映有關因素對預測目標的影響和作用。
p階自回歸模型AR(p)的數學形式為

定義:
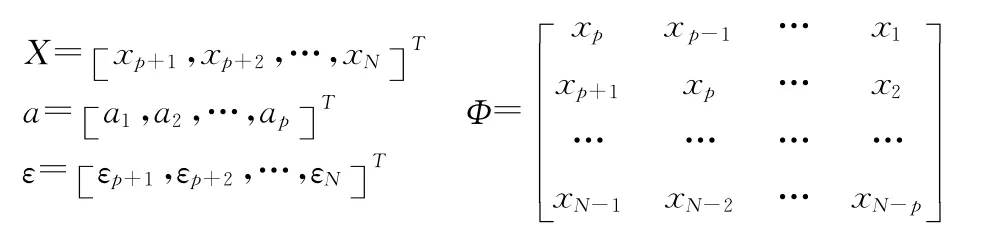
當模型階數p固定時,用最小二乘法估計模型系數。最小二乘法目標函數為

根據矩陣理論可知,參數估計值為


未來第N+l時刻(l為預報步數)的預報值為
3.2 多層AR預報模型
多層AR預報方法的基本思想是:把動態系統的狀態預報問題分為兩部分,即對系統的時變參數的預報和在此基礎上的對系統狀態的預報。這種方法充分注意到了系統的時變特性,因此可以較好地提高預報精度[12]。
多層AR模型是建立在AR模型基礎上的,通過分析時間序列的平穩性進行預報。當系統狀態不平穩時,采用AR模型對時變參數進行第二層預報,若時變參數的時間序列仍為不平穩,則需對時變參數的參數進行下一層預報,直至最底層參數平穩為止。
多層AR模型形式為

其中,ai(t)為t 時 刻 參 數ai的 值,a1(t),a2(t),…,ap(t)為待估的時變參數序列,p為模型階數。
根據以上多層AR模型的形式,給出具體實現的步驟如下:
步驟一:利用AR方法建立第一層模型。

多層AR模型是在AR模型基礎之上,增加考慮了模型參數的時變性。令多層AR模型在p+1時刻的時變參數為AR模型求解所得參數:

根據p+1時刻的時變參數及最小二乘法,可以估算出p+1到N時刻的各參數值。具體如下:


因此可得:

對參數進行平穩性檢驗的方法有相關系數法、游程法等。若序列為平穩序列,則算法到該層結束,利用AR模型進行各時序的預報即可。若不平穩,則需建立下一層級的多層AR模型。
步驟四:根據步驟三的檢驗結果,建立多層AR模型,直至參數序列為平穩序列。
步驟五:利用預報得到的時變參數值對原序列值進行預報。

4 仿真預報結果及分析
船舶的運動姿態仿真為預報方法評價提供數據。具體風浪參數及船型參數見2.1節和2.2節中利用的仿真參數。根據自回歸預報方法對數據量的需求,本文利用第41s~80s的橫搖角數據建立預報模型,并分別利用此后6s和15s的數據進行預報檢驗。其中一次運行得到的預報結果如圖3、圖4所示。
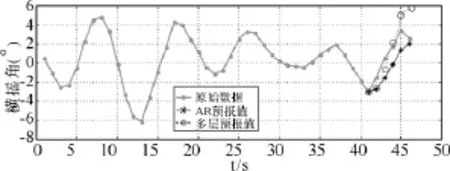
圖3 6s的橫搖角預報圖

圖4 15s的橫搖角預報圖
運用AR模型及多層AR模型對船舶橫搖進行預報,統計方差、絕對誤差和相對誤差等誤差指標,對預報的準確性進行評價,誤差結果見表1。在對船舶橫搖6s預報時AR方法的平均相對誤差為1.01,較難滿足預報精度,多層AR方法預報的平均相對誤差為0.1708,較AR模型提高了預報的精度;15s預報中多層AR方法優越性不如極短期預報明顯。分析可知主要原因在于多層AR模型在對時變參數進行預報時放大了時變參數對原始序列的影響。綜上,多層AR模型在一定程度上改進了AR模型,提高了預報精度和預報時長,改善了預報效果。
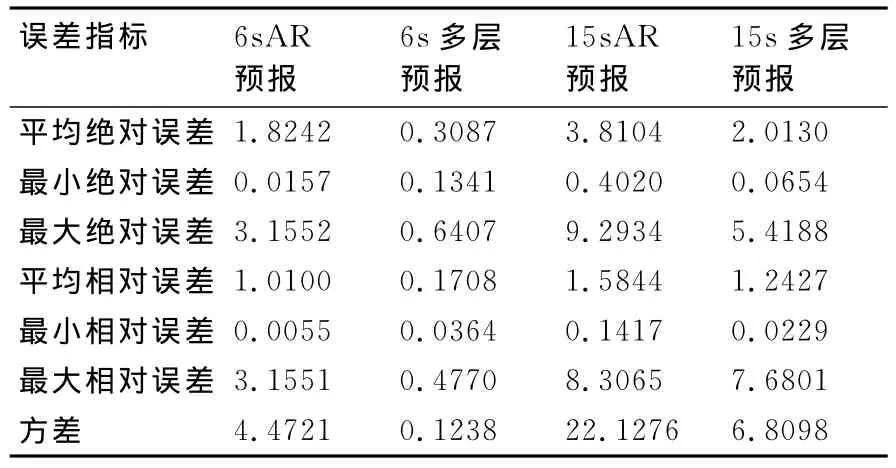
表1 預報誤差比較表
5 結語
艦船的運動姿態的仿真與預報研究極為重要。本文從頻域角度進行隨機風浪的仿真,據此仿真獲取橫搖角數據,在此基礎上,采用AR模型和多層AR模型進行橫搖角的預報。多層AR模型可應用于艦船其它自由度的運動姿態預報中,該方法能解決非線性預報問題,較AR方法有一定的改進和提高。
[1]趙希人.具有艏前波觀測量的大型艦船姿態運動極短期預報[J].船舶力學,2003,7(2):39-44.
[2]翁震平,顧民,劉長德.基于二階自適應Volterra級數的船舶運動極短期預報研究[J].船舶力學,2010,14(7):732-740.
[3]彭秀艷,趙希人,高奇峰.船舶姿態運動實時預報算法研究[J].系統仿真學報,2007,19(2):267-271.
[4]王燕.應用時間序列分析[M].北京:中國人民大學出版社,2005:5-8.
[5]陳遠明,葉家瑋,張兮龍.船舶運動的極短期預報試驗[J].船海工程,2010,39(1):13-15.
[6]Gunther F.Clauss.Dramas of the sea:episodic waves and their impact on offshore structures[J].Applied Ocean Research,2002,24:147-161.
[7]馬雪倩,葉錫君,謝忠紅.基于模型的海浪模擬仿真[J].計算機工程與設計,2009,30(2):446-447.
[8]Tristan Perez.Ship Motion Control[M].Trondheim:Norwegian University of Science and Technology,2005:18-26.
[9]Nayfeh A H,Sanchez N F.Stability and complicated rolling responses of ships in regular beam seas[J].International Shipbuilding Progress,1990,37(412):331-352.
[10]馬潔,韓蘊韜,李國斌.基于自回歸模型的船舶姿態運動預報[J].艦船科學技術,2006,3(28):28-30.
[11]趙建軍,肖雄波,楊利斌.基于AR模型和ZMNL變換的分布海雜波仿真方法[J].計算機與數字工程,2011,39(8).
[12]韓志剛.多層遞階方法及其應用[M].北京:科學出版社,1989:139-141.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
