基于模糊控制的潛艇高壓氣自動控制研究*
2012-10-16 08:05:14聶海英丁風雷
艦船電子工程 2012年12期
關鍵詞:深度
聶海英 丁風雷 劉 軍
(1.海軍潛艇學院研究生隊 青島 266042)(2.海軍潛艇學院作戰指揮系 青島 266042)(3.海軍潛艇學院訓練部潛艇模擬器訓練中心 大連 116023)
1 引言
高壓氣是潛艇操艇系統的重要組成部分,其使用時機非常關鍵,是否使用高壓氣是潛艇操縱人員需要考慮的關鍵問題;潛艇高壓氣的使用具有不可逆和非連續性,故高壓氣使用和控制必須把握三個時間點:供氣時機、停止供氣時機和解除氣壓時機[1]。利用傳統的PID控制方法對高壓氣進行自動控制,其可能性很小。模糊控制是一類應用模糊集合理論的控制方法,尤其是當受控對象含有不確定性,而且很難用常規非線性控制理論處理時更為有效。根據潛艇高壓氣控制特點,采用模糊控制是合理的選擇。同時綜合利用潛艇指揮員的操縱經驗,設計模糊控制器對潛艇高壓氣進行控制,當艙室破損時,自動實現供氣、停止供氣和解除氣壓。
2 潛艇基本運動控制模型
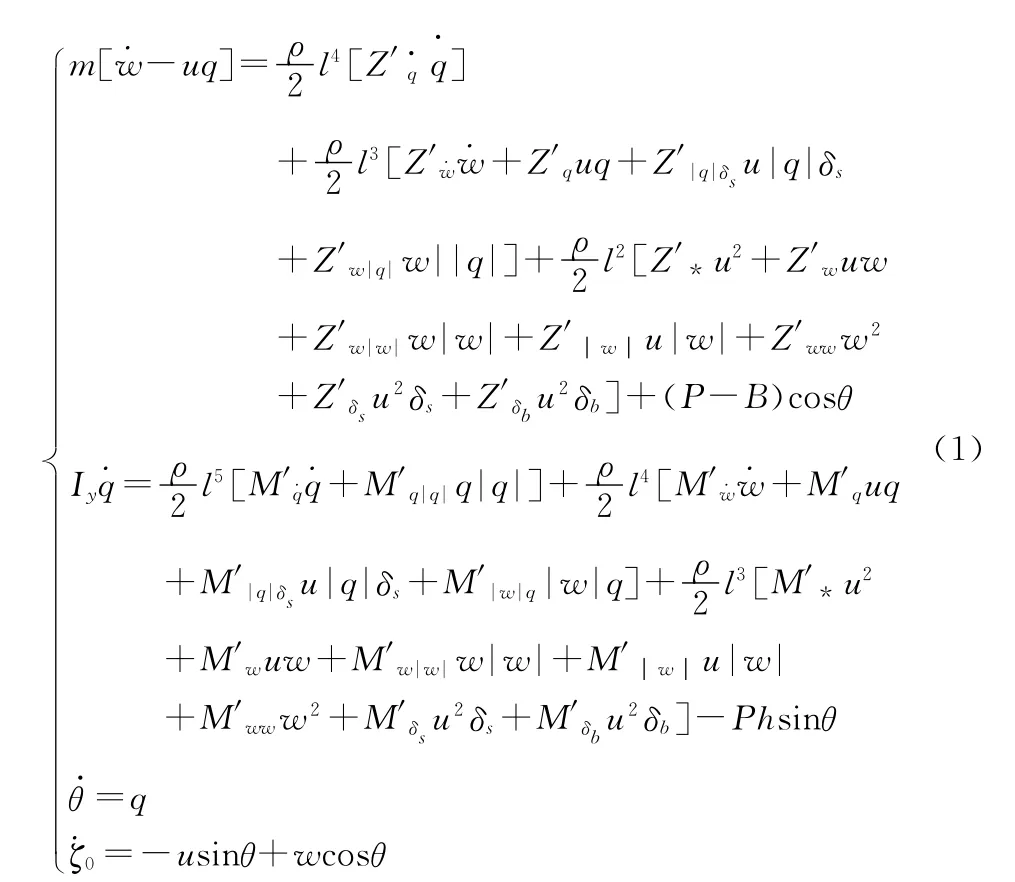
本文采用垂直面操縱非線性方程作為潛艇基本運動控制模型[2],其表達式如下:
3 潛艇高壓氣模糊控制器
模糊控制器的結構[3]如圖1中虛線所示:
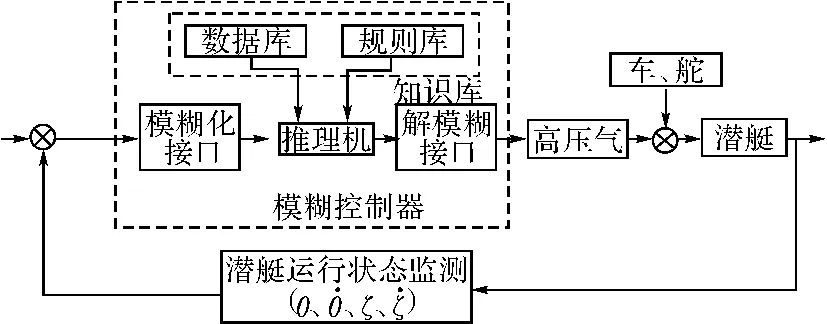
圖1 潛艇高壓氣模糊控制器
3.1 隸屬函數確定
模糊控制器選用多輸入—單輸出模糊控制器,它的四個輸入分別為縱傾θ、縱傾變化率、深度差Δζ和深度變化率。輸出量為高壓氣控制信號U。
縱傾θ的模糊集為:{NB,NM,NS,ZO,PS,PM,PB};論域為:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
深度差Δζ的模糊集為:{NB,NM,NS,ZO,PS,PM,PB};論域為:{-3,-2,-1,0,1,2,3}。縱傾變化率θ·的模糊集為:{NB,NS,ZO,PS,PB};論域為:{-3,-2,-1,0,1,2,3}。
控制信號U 的模糊集為{NB,NM,NS,NZ,ZO,PZ,PS,PM,PB};論域為:{-4,-3,-2,-1,0,1,2,3,4}。
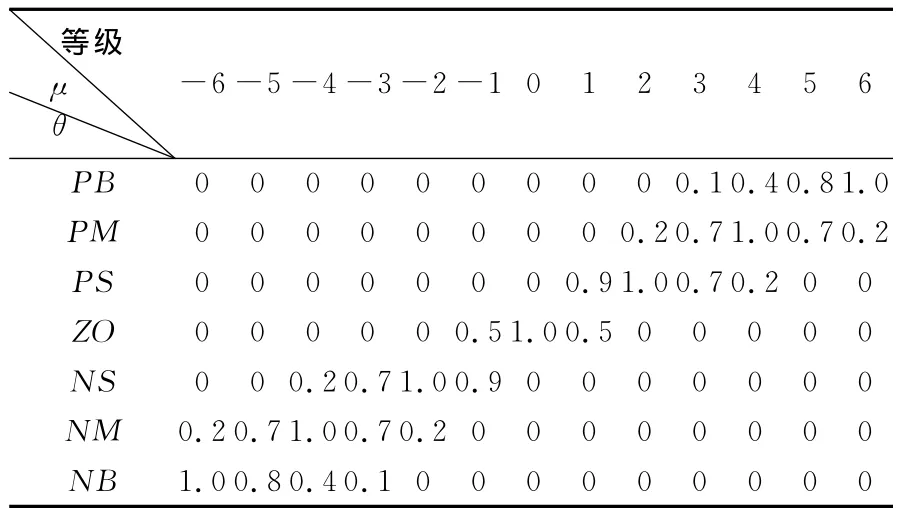
表1 模糊變量θ的賦值表
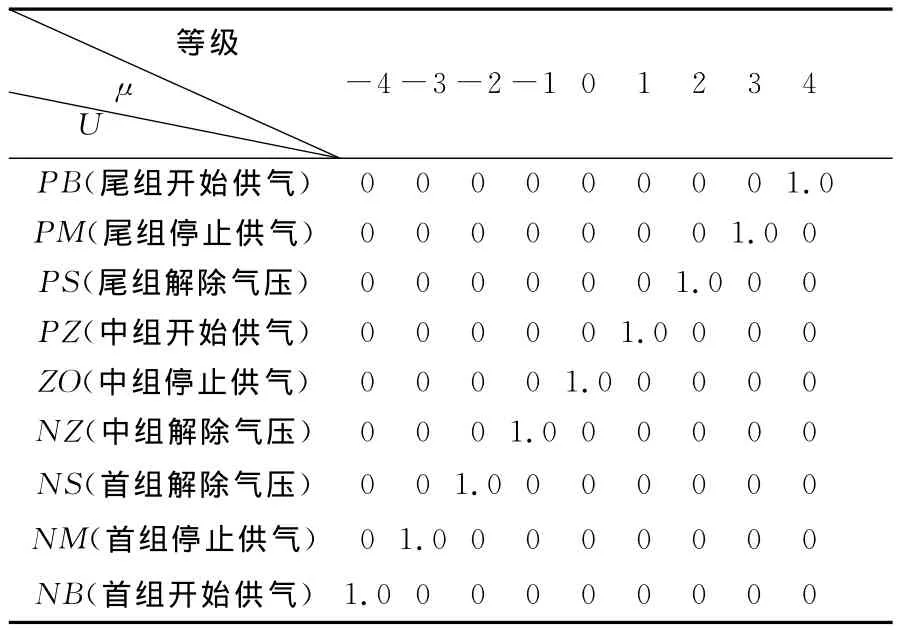
表2 模糊變量U的賦值表
與縱傾θ相應的隸屬度值如表1所示,與高壓氣控制信號U相應的隸屬度值如表2所示。
3.2 模糊控制規則
在模糊控制規則的建立過程中,通過與潛艇操縱方面的專家(優秀潛艇指揮員、潛艇操縱理論研究人員、實驗室模擬器操作人員)交流、探討,總結成初步經驗集,然后進行大量的人工操縱仿真實驗[4],驗證了所獲取經驗的有效性,并對部分應急操縱方法進行了定量分析,最后通過相同抗沉目標下的多方案比較,總結出共21條模糊控制規則,其中的前3條如下所示:
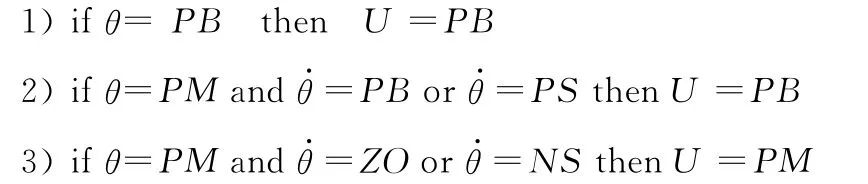
3.3 模糊推理
根據3.2節提出的糊控制規則,通過模糊計算求出模糊控制結果,然后再做一次轉換,求得清晰的控制量輸出,即模糊解,在本控制器中,結果U為離散的模糊矢量,采用式(2)進行轉化。

在此過程中,將模糊控制器進行必要的簡化,如首、尾組主壓載水艙高壓氣的控制量僅僅依據潛艇的縱傾和縱傾變化率;中組主壓載水艙高壓氣的控制量僅僅依據潛艇的深度差和深度變化率。此時,原來的多輸入—單輸出控制器解耦為單輸入—單輸出控制器,從而降低了控制器的復雜度。最后利用計算機可將預先計算好的控制量U制成控制表,作為文件存儲在計算機中。當進行實時控制的時候,便于根據輸出的信息,從文件中查詢所需采取的控制策略。
4 仿真分析
用前述控制策略設計高壓氣模糊控制器,以某型潛艇為仿真對象[5],式(1)為運動控制模型,應急上浮到水上狀態為控制目標,對潛艇不同破損情況下高壓氣進行自動控制,假定艙室不進行供氣支頂,不進行升降舵控制。仿真結果如下所示:
1)潛艇初始深度50m,航速4kn,Ⅰ艙發生破損,破損面積0.05m2,在進水40t左右時堵漏成功。
2)深度50m,航速4kn,Ⅲ艙發生破損,破損面積0.06m2,在進水55t左右時堵漏成功。
3)深度100m,航速4kn,Ⅵ艙破損,破損面積0.04m2,在進水50t左右時堵漏成功。
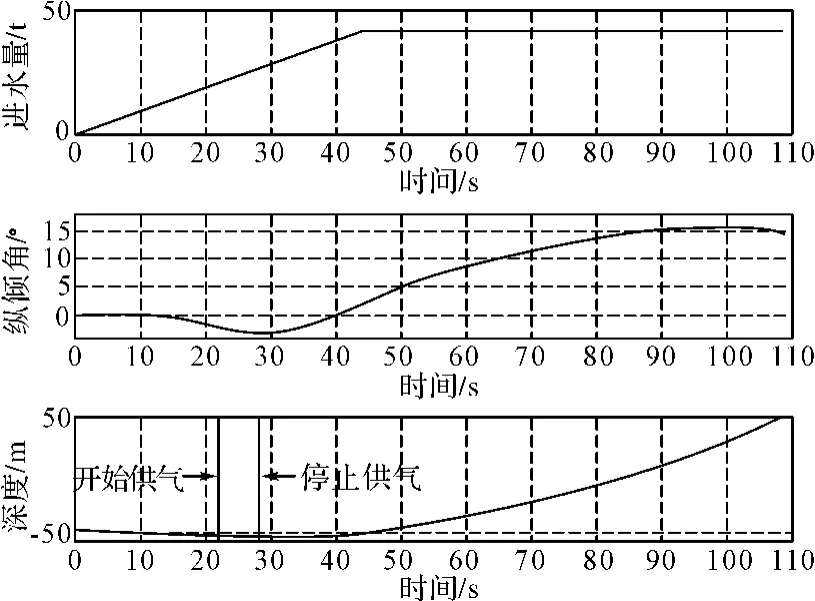
圖2 Ⅰ艙破損應急上浮高壓氣自動控制仿真曲線
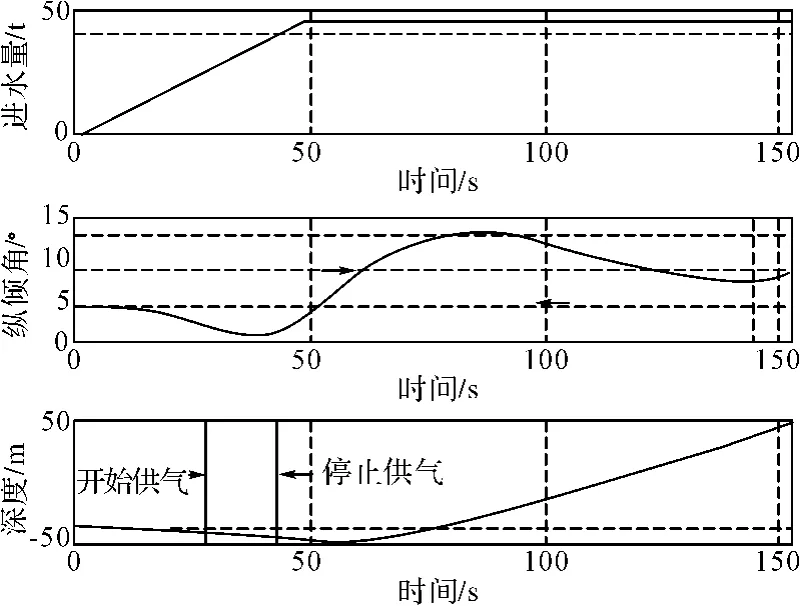
圖3 Ⅲ艙破損應急上浮高壓氣自動控制仿真曲線
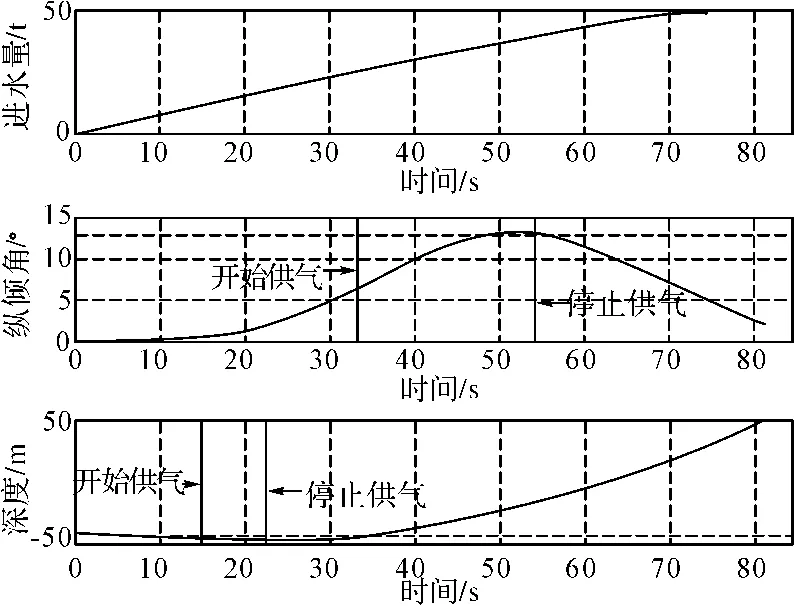
圖4 Ⅵ艙破損應急上浮高壓氣自動控制仿真曲線
圖2~圖4所示的仿真結果表明:利用該高壓氣模糊控制系統在處置艙室破損時,以上浮到水上狀態為控制目標的應急操縱過程中,具有較好的控制效果,潛艇均能在采取措施后110s左右順利浮出海面。
5 結語
本文提出了一種基于模糊控制的潛艇高壓氣自動控制設計構想,通過模糊控制器的設計與仿真表明,在潛艇損失浮力情況下,利用模糊控制器能夠較為精確的對潛艇高壓氣實時自動控制,從而使潛艇較平穩的浮出水面。從而驗證了該控制器的有效性,同時也說明了使用模糊控制方法實現潛艇高壓氣自動控制的可行性。
[1]施生達.潛艇操縱性[M].北京:國防工業出版社,1995.
[2]徐亦凡.潛艇操縱原理與方法[M].北京:兵器工業出版社,2002.
[3]諸靜.模糊控制理論與系統原理[M].北京:機械工業出版社,2005.
[4]徐亦凡,陳丘岳,胡坤.高壓氣吹除時機對潛艇動力抗沉影響的仿真研究[J].艦船電子工程,2010,30(11):114-116.
[5]胡坤,吳超.潛艇深度模糊控制及其仿真研究[J].系統仿真學報,2004,16(10):64-66.
[6]劉常波,王建,丁風雷.高壓氣在潛艇自浮操縱中的使用研究[J].艦船電子工程,2010,30(10):141-142.
[7]徐亦凡,陳丘岳,胡坤.潛艇逆速時的垂直面機動仿真分析[J].艦船電子工程,2010,30(12):110-112.
[8]高俊吉,黃昆侖,朱軍.潛艇定深運動的自適應模糊控制研究[J].海軍工程大學學報,2004,16(2):83-88.
[9]劉常波,王建,丁風雷.潛艇舵卡時高壓氣的使用時機及仿真[J].四川兵工學報,2010,31(12):1-3.
[10]熊萍,何漢林,王天虹.混沌范德玻—杜芬系統的T-S模糊控制[J].計算機與數字工程,2011(9).
[11]葉劍平,戴余良,李亞楠.潛艇主壓載水艙高壓氣吹除系統數學模型[J].艦船科學技術,2007,29(2):112-115.
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57