變電站巡檢機器人云臺設計及動力學仿真
2012-10-16 10:08:58王明瑞孫大慶
制造業自動化 2012年9期
曹 濤,王明瑞,孫大慶,楊 墨,王 飛
(山東電力研究院 國家電網電力機器人重點實驗室,濟南 250000)
0 引言
長期以來,我國變電站中大多采用人工巡檢作業方式,在高壓、超高壓以及惡劣氣象條件下,不僅對人身會照成極大的危害,同時對電網安全運行也會帶來一定隱患。而變電站巡檢機器人系統以全自主控制方式,在無人值守變電站對室外高壓設備進行巡視,可及時發現變電站高壓設備的熱缺陷、異物懸掛等異常現象。通過巡檢機器人攜帶的各種傳感器,完成變電站設備的圖像采集、設備儀表的識別、紅外狀態檢測等,同時記錄相關設備信息,并提供異常狀態報警。完全代替了傳統的人工巡檢作業方式,完成變電站高壓變電設備的所有巡檢作業。
變電站巡檢機器人云臺系統是安裝、固定信息采集系統的支撐設備,可根據系統預設命令,帶動承載在云臺上方的信息采集系統轉動,使信息采集系統中攝像機完成監視區域的掃描。本文就變電站巡檢機器人云臺系統結構設計進行探討。
1 云臺工作原理及總體結構
變電站巡檢機器人云臺設計時,需要考慮巡檢機器人運行環境、云臺安裝位置、云臺使用方式、工作電壓及其負載大小,同時也要考慮與巡檢機器人外觀是否搭配等因素。
功耗上,云臺選用的功耗電機,減少巡檢機器人整機的功耗,減少對整體巡航能力的影響。云臺在控制上采用云臺控制板獨立控制水平、垂直兩個方向旋轉動作。同時采用總線方式用于工控機與云臺控制板間的控制信號傳遞,同時通過水平、垂直兩個解碼器分別解出相應控制信號,再控制云臺的水平、垂直方向轉動。通過巡檢機器人控制后臺或預設命令發出數據信息,通過云臺解碼器解碼成機械的上下左右運動,進而配合攝像機轉動。完成監視區域圖像采集工作。
變電站巡檢機器人云臺的總體結構,如圖1所示。云臺驅動核心是通過內裝的兩個電動機。一個負責水平方向的轉動,另一個負責垂直方向的轉動。水平、垂直電機驅動減速器以增大驅動扭矩并降低輸出轉速,信息采集系統及其附件安裝于支撐板上,同時支撐板隨云臺的垂直電機驅動而轉動,進而完成俯仰旋轉動作。信息采集系統同云臺同時隨云臺的水平電機驅動而轉動,進而完成水平旋轉的動作。考慮變電站巡檢機器人工作環境,其供電方式是設計中必須考慮的因素,由于變電站巡檢機器人為無人職守全自動巡檢模式,所以采用巡檢機器人承載電壓直流24V。同時水平方向的角度可做360度轉動,垂直俯仰方向則有110度旋轉范圍。當轉動角度達到預先設定的限位開關時,限位開關動作切斷電源,云臺此時停止轉動。此外,考慮到巡檢機器人云臺復雜的工作條件,如巡檢機器人運動時會產生顛簸等震動現象,如何設計減速器使得云臺即能夠滿足水平轉速和垂直轉速要求,同時又具有較大的保持扭矩就成為設計的難點之一。

圖1 云臺結構示意圖
2 模型設計及仿真分析
2.1 直流電機選擇
由于云臺是由水平、垂直兩部分獨立的傳動機構組成的,而垂直傳動機構是主要承載機構,所以在設計時要以垂直傳動機構作為主要承載機構來設計,而水平傳動機構只受水平磨擦轉矩和電纜拖帶等所產生的轉矩影響。根據設計經驗,水平方向所選用的電機功率一般為垂直方向的一半。
變電站巡檢機器人云臺的承重能力要求不低于10kg,信息采集系統質心與云臺旋轉軸的距離為0.15m,因此,云臺的保持扭矩N1要求大于15N/m。此外,云臺的俯仰角速度為≥10°/s,根據市場上主要型號的電動機,我們擬選用轉速在4000rpm,齒輪器減速比為1:250的齒輪減速電動機,而云臺的齒輪傳動比為150/30,則云臺的俯仰角速度v為:

云臺的垂直驅動扭矩N2為10N/m,根據傳動方案大小齒輪的減速比可知,電動機齒輪傳動伸出端的輸出扭矩為:

則最小電機額定扭矩為:

綜上所述,該直流減速電機的額定電壓為24V,額定轉速為4000rpm,減速比分別為1:250,額定轉矩為43mN/m,額定功率為15w能夠滿足云臺在垂直方向的轉速和扭矩要求。同理在水平方向上將電動機的齒輪器減速比調整為1:125其他尺寸不變能夠滿足水平方向上轉速和扭矩要求。
2.2 減速機構設計
設計時根據巡檢機器人云臺運行特性決定其內部空間有限,要使云臺的外型盡量小巧,所以內部空間相對不是很大,同時在保證其傳動特點采用齒輪傳動,以機械設計原理[1]為基礎,其設計步驟為:
1)選定齒輪類型、精度等級、材料及齒數:選用直齒圓柱齒輪7級精度,材料為45鋼,并調質及表面淬火硬度40~50HRC,小齒輪齒數為23,大齒輪為23×6.5=150。
2)按齒面接觸強度設計:確定公式內各計算數值,如大齒輪分度圓直徑、圓周速度、齒寬、載荷系數,同時最終確定其模數。經計算可得其模數為1。
3)校核齒根彎曲強度:確定大、小齒輪的彎曲疲勞壽命、彎曲疲勞強度極限系數等,并計算彎曲疲勞許用應力和載荷系數等,同時根據文獻中的計算公式,驗證可知所設計的齒輪傳動滿足設計要求。
2.3 三維實體建模
由于巡檢機器人云臺對保持力矩、減速結構等提出較高的要求,本文建立了基于ADAMS軟件的云臺動力學仿真模型,對所設計的巡檢機器人云臺系統進行動力學研究。在設計之初,就可以實現對整個巡檢機器人云臺的運動狀態、動力性能、載荷及應力屬性等進行分析,可較大程度提高巡檢機器人云臺設計的質量和效率。對巡檢機器人云臺做動力學分析,需要獲取云臺各個零部件的屬性,如質量參數、慣性參數、質心坐標等參數。然而三維實體建模并不是ADAMS的強項,故筆者選用在Solid Works軟件下建立所有云臺的零部件模型,同時完成巡檢機器人云臺虛擬樣機的裝配工作如圖2所示,為直觀觀察云臺的運行狀態,圖2中已添加信息采集系統。
圖2 云臺虛擬樣機裝配圖
2.4 動力學仿真分析
利用ADAMS/View自定義仿真輸出量,同時利用這一模塊提供的樣機模型自檢工具,針對云臺模型進行自檢,同時設置仿真分析控制參數,最后設置虛擬樣機相關參數以及輸入載荷進行仿真分析.如果要進行振動分析,需加載 ADAMS/Vibration模塊。
本文中,筆者將所建模型以*.x_t格式導入ADAMS軟件中,在模型上添加約束、力/力矩和運動參數;云臺減速齒輪材料為45鋼,其泊松比為μ=0.29,E=2.07×105 N/mm2,電機轉速為2000r/min;云臺支撐板及兩側支撐材料選用LY12,其泊松比μ=0.33,E=7.24×104N/mm2。添加云臺垂直方向旋轉轉速為12°/s、水平方向轉速為12°/s 。
給定上述輸入條件后,應用step函數設定云臺由勻速轉動到靜止的制動時間為0.1s 。根據軟件分析得其仿真結果。云臺載荷的運動軌跡如圖3所示。其中由水平方向轉動和垂直俯仰運動疊加而成。云臺齒輪切向力最大值為1000N ,為垂直擺角位置,證明在該位置由于云臺急停而產生了加大的沖擊載荷,如圖4所示。云臺的垂直俯仰驅動扭矩,如圖5所示。其驅動扭矩為14N/m,根據前文分析可知,云臺的保持扭矩為15N/m,電機減速器輸出端額定扭矩為65mN/m進而驗證選的電機能夠滿足云臺系統性能要求。
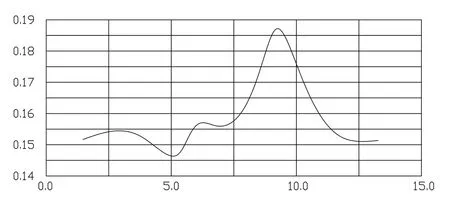
圖3 載荷運動軌跡

圖4 齒輪切向力
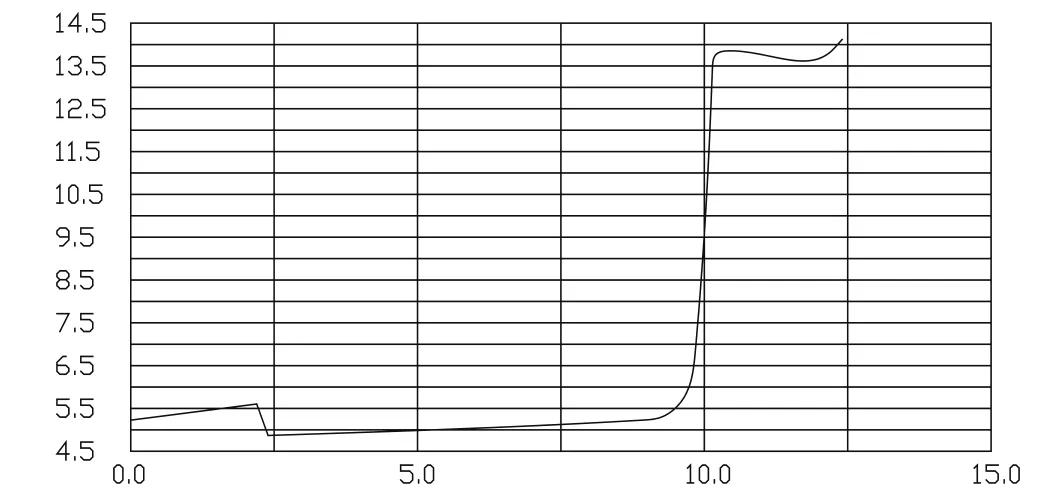
圖5 云臺垂直驅動扭矩
3 結論
設計了適用于變電站巡檢機器人云臺系統的機械結構,使此結構能夠滿足垂直俯仰轉動和水平轉動性能要求,同時對云臺零部件模型利用三維模擬建模,直觀了解設計動態,并采用ADAMS軟件對云臺結構進行動力學仿真分析,驗證了所設計的機械結構能夠滿足變電站巡檢機器人云臺系統的需求,為云臺系統的優化設計依據。
[1]濮良貴,紀名剛.機械設計(第七版)[M].高等教育出版社,2009.
[2]劉建勝,張凡.一種用于變電站高壓觸點溫度在線監測的新方法[J].電力系統自動化;2004,(04).
[3]大槻,治明,宋爾純.用計算機控制移動式機器人的方法與展望[J].機器人;1980,(02).
[4]KARL T.ULRICH;PRODUCT DESIGN AND DEVELOPMENT[M].2005.
[5]魯守銀,錢慶林,張斌,王明瑞.變電站設備巡檢機器人的研制[J].電力系統自動化,2006,(13).
[6]KARL T.ULRICH;PRODUCT DESIGN AND DEVELOPMENT[M].2005.
[7]Biot M A Themoelasticity and irreversible thermodynamics[J]1956(03) DOI:10.1063/1.1722351.
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
人大建設(2019年12期)2019-05-21 02:55:32
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
